ORB
- oFast detector + r-BRIEF descriptor
- fast and illumination/rotation-invariant (빠르고, 조명/회전에 관계 없음)
- FAST(Feature from Accelerated Segment Test)
-
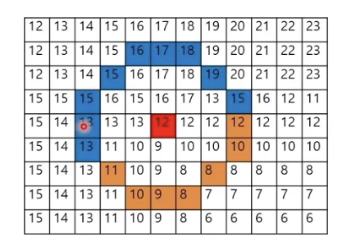
N개의 연속적인 픽셀이 중심 픽셀보다 밝거나, 어두운 경우(intensity), 이를 코너로 판단
-
ex) 반지름이 3인 경우 9개의 연속 픽셀이 해당 조건 만족하면, 코너로 간주
-
- BRIEF
-
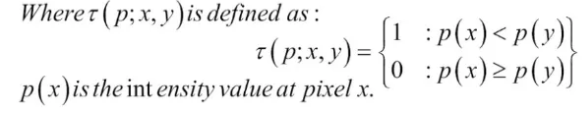
FAST 알고리즘을 통해 추출한 이미지의 특정 패치를 intensity test 를 통해 set of binary 로 변환
-
Image Matching
- 특징 추출 (feature extractor)
- 각 특징 기술 (feature descriptor)
- input image들의 각 특징의 유사도 비교
- 매칭 추출
-
NNDR (Nearest Neighbor Distance Ratio)
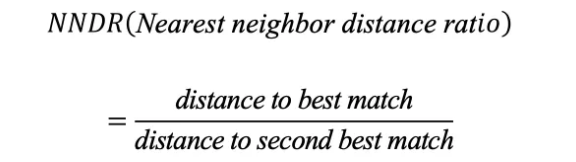
- NNDR 이 특정값(thres) 보다 작으면, good match | 1 일때 Worst
-
CNN (Convolutional Neural Network)
-
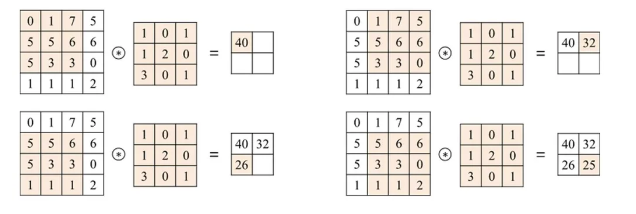
Convolution
-
필터를 통해 이미지의 지역적 특징 학습
-
-
Relu
- Activation function in neural network (활성함수)
- image 의 non-linearity (비선형성) 증가
-
Pooling
- 중요한 정보만 남김 (최대값 저장)
- 크기 줄임

해야한다면, 다 하게 되더라.