1. 개요
본격적인 최적화 기법으로 넘어가 보도록 하겠습니다.
3장은 앞서 몇 번 언급된 Line Search 기법입니다.
아래의 식과 같이, Search Direction 의 방향으로 (Step Length)만큼 이동해가며, 값을 계속 갱신해 나가며, 최적값을 찾는 방식입니다.
책에서는 방향을 의미하는 가 decent direction으로 가야 된다고 언급하고 있습니다. 값이 수렴을 해야 하니 당연한 말입니다. 중요한 부분은 다음 수식입니다.
사실 위의 수식에서 부분은 생략되어서, 의 미분 값으로만 최적화를 하는 것도 가능은 합니다. 하지만, 수렴 속도나 정밀도 등을 고려할 때, 를 제어하는 것이 필요합니다.
1.1 예제
예제를 가지고 한번 설명해보겠습니다.
아래의 를 최적화를 해보겠습니다.
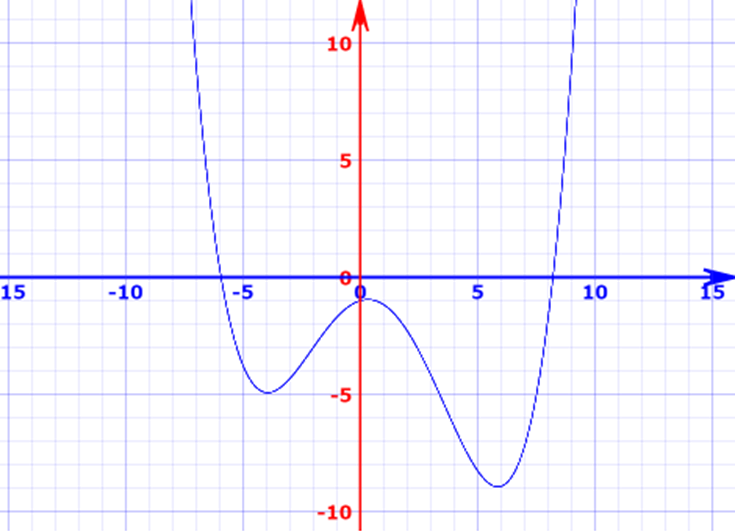
이 함수의 형태는 아래와 같습니다.
대략, 근처에서 최적값이 존재하는 것을 볼 수 있습니다.
여기서는 간단하게 위의 는 1이라고 하겠습니다.
그럼, 이며, 입니다.
, 인 경우를 보면 각각, 값은 22.3, -2.13 이며, 는 -22.3, 2.13입니다. 여기서 는 decent direction이 되어야 한다는 의미를 보면, 인 경우를 보면, 최적이 되기 위해서는 x가 감소를 해야 합니다. 이를 위해서는 방향이 (-)로 가야 합니다. -22.3의 (-)부호가 그 의미입니다. 반대로 인 경우는 최적으로 가기 위해서는 증가를 해야 합니다. 2.13 즉 양의 값을 가지는 의미입니다.
시작점 , Step Length 를 0.01로 두고 한번 코드를 짜보겠습니다.
class LineSearchIntro
{
private:
static double nextX_k(double x_k)
{
double derivF = 0.04 * x_k * x_k * x_k - 0.09 * x_k * x_k - 0.9 * x_k + 0.3;
double p_k = -derivF;
double stepLen = 0.01;
return x_k + p_k * stepLen;
}
public:
static double getSolve(double init_x)
{
double prev = init_x;
while (true)
{
double next = nextX_k(prev);
if(abs(prev - next)<0.001)
break;
prev = next;
}
return prev;
}
}; double sol = LineSearchIntro::getSolve(10.0);위의 코드에서 getSolve를 보면 while문을 통해 계속 x의 값을 업데이트 하는 것을 볼 수 있으며, 이전 값과의 변화가 0.001이하이면 종료하도록 했습니다. 이 작업을 iteration이라고 합니다.
그리고 실제 x를 업데이트 하는 nextX_k메소드를 보면, , 2개 수식에 의해서 업데이트 되고 있습니다.
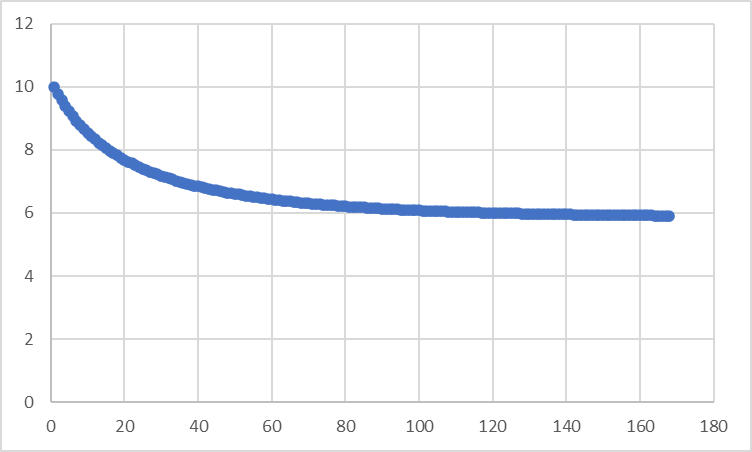
결과를 보면 5.9118835346333682로 위 그래프에서 보듯이 6근처의 값이 나옵니다. 그리고 x값의 변화를 보면, 아래 그래프와 같습니다.
약 170번 정도 iteration을 하며 Solution으로 수렴해 가는 것을 볼 수 있습니다. 앞으로 우리가 해야 하는 모든 작업은 이 그래프 같이 결과가 수렴하도록 해야 하는 것입니다.
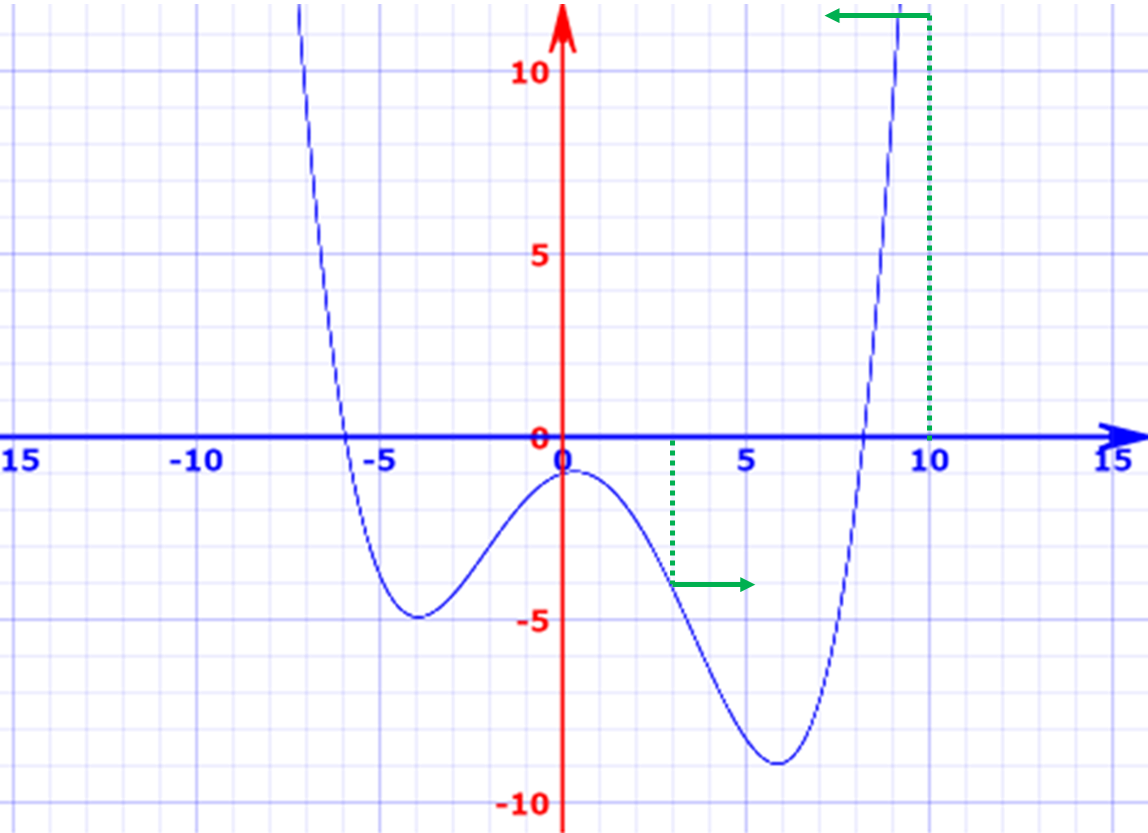
이번에는 반대로 시작점 으로 해보겠습니다.
double sol = LineSearchIntro::getSolve(-6.0);약 180회의 iteration을 거쳐 결과는 -3.9998828942235911이 나옵니다. 이는 위의 그래프에서 좌측의 Local Optimization을 찾은 경우가 됩니다. 시작 위치에 따라서 결과가 크게 달라지는 것을 볼 수 있습니다.
이해하기에 도움이 되는 예제지만, 실무에서는 절대 못 만날 예제입니다...
2. Step Length
앞서 예제를 보면, Step Length ()를 임의로 0.01로 두었고, 이 때 Iteration횟수는 170회 정도였습니다. 경우에 따라서 다르기는 하겠지만, Iteration이 100회를 넘어가는 건 그렇게 좋은 경우는 아닙니다.
예제와 같이 단순한 문제에서는 이 원인은 Step Length가 너무 작았기 때문엡니다. 하지만 무작정 Step Length를 키우지도 못하는데 그 이유는 자칫 수렴도 아니고 발산도 아니고 핑퐁을 치는 (steady state에 도달하지 못하는) 상태가 되어 버릴 수도 있습니다.
그래서 Step Length를 결정하는 몇 가지 기법에 대해 설명합니다.
사실 기법이라기 보다는 분석에 더 가깝지 않을까 싶습니다. 이 방법도 결국은 임의 선택의 순간이 있기 때문입니다. 단지 이런 기법을 통해서 조금 더 논리적으로 Step Length를 찾아보는데 의미가 있다고 할 수 있습니다.
2.1. Wolfe Condition
Step Length 를 결정하기 위한, 기법도 복수가 존재하나
대표적인 wolfe condition에 대해서만 간략하게 언급하겠습니다.
수식적 구성은 아래와 같습니다.
첫 번째가 일반적인 wolfe condition이고, 두 번째가 strong wolfe condition입니다. 여기서 중요한 점은 step length가 k에 따라 다를 수 있습니다. 즉 iteration마다 업데이트 될 수 있다는 의미입니다.
Strong condition을 보면 2 번째의 등호 방향이 반대인 것을 볼 수 있읍니다.
이 말은 양 변이 음(-)의 값을 가지는 경우에 만족할 수 있습니다.
수식으로만 보면 이해가 잘 안될 수 있으니 그림을 보겠습니다.
위의 예제에서
인 경우, 로 두고 를 x축으로 하여 그래프를 그려보면 아래와 같습니다.
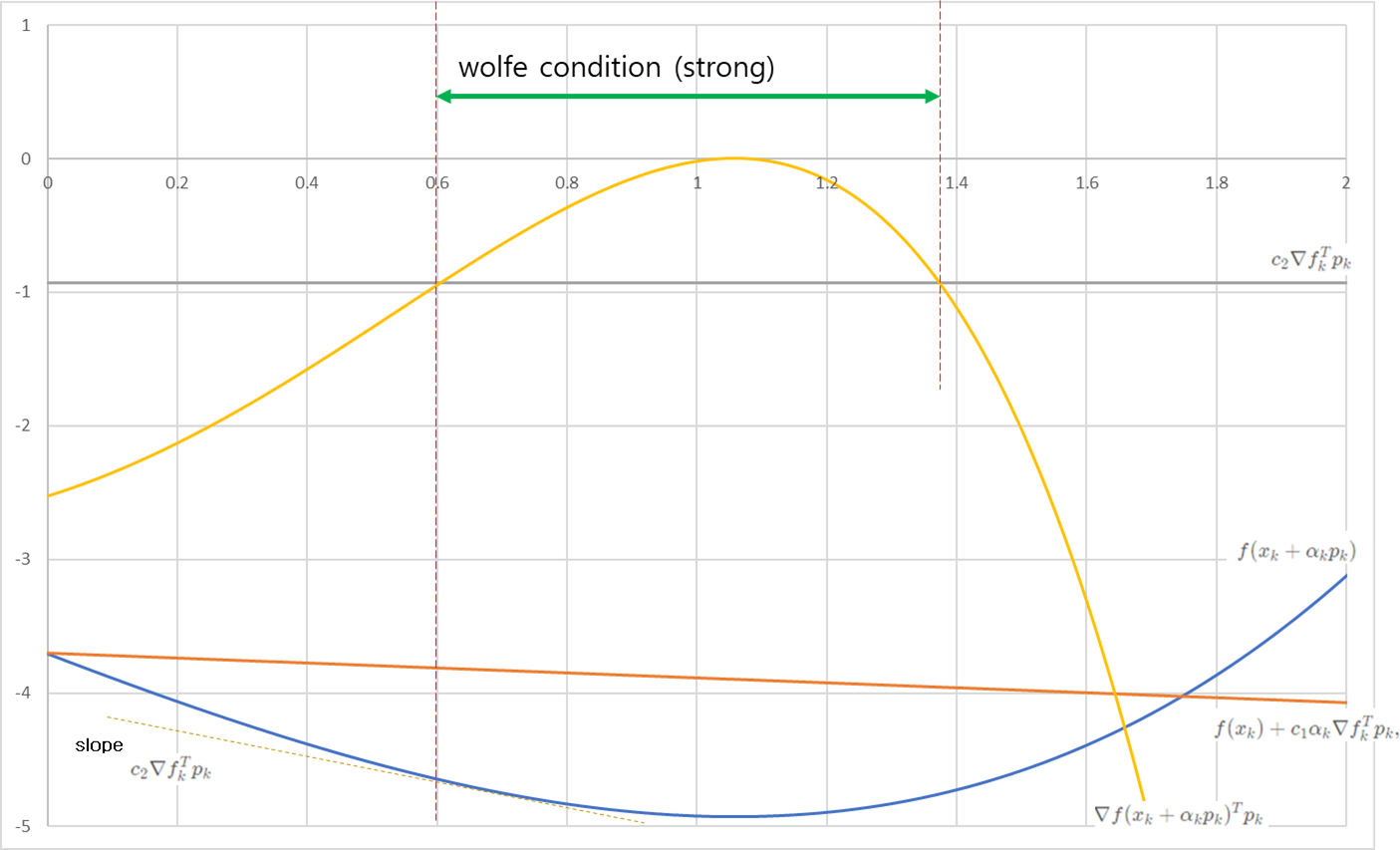
파란색 라인이 이고, 주황색 라인이 입니다. 위의 첫 번째 조건을 만족하는 는 입니다.
이 구간 내에서 두 번째 조건을 만족하는 구간은 입니다. 이 예제에서는 이 구간은 strong condtion도 동시에 만족합니다. 즉 step length는 이 사이의 값을 사용하면 됩니다.
눈 여겨볼 부분은 값입니다. 가 의 미분값이기 때문에 이는 2차 미분에 해당합니다. 그래서 curvature condition이라고도 부르며, 이 값을 기울기로 하는 직선이 만나는 지점, 즉 의 미분 값이 인 지점이 두 번째 조건을 만족하는 위치이기도 합니다.
이 외에도 Goldstein condition이라는 방식도 존재하는데, 개념 자체는 크게 다르지않습니다.
2.2. Wolfe Condition 예시
위의 예제에서 Wolfe Condition을 적용해보겠습니다.
기존 nextX_k의 stepLen을 0.01로 고정했으나,
findStepViaWolfeCondition이라는 메소드에서 Wolfe Condition을 이용하여 찾도록 했습니다.
static double nextX_k(double x_k)
{
double derivF = 0.04 * x_k * x_k * x_k - 0.09 * x_k * x_k - 0.9 * x_k + 0.3;
double p_k = -derivF;
//double stepLen = 0.01;
double stepLen = findStepViaWolfeCondition(x_k, derivF);
return x_k + p_k * stepLen;
}원할한 계산을 위해서 와 를 계산하는 메소드를 따로 만들고
findStepViaWolfeCondition 을 구현했습니다.
여기에도 일종의 최적화 기법이 들어가야 하는데, 간단히 step이 0.0에서 0.01씩 증가해가며, 조건을 만족하는 step length를 찾도록 했습니다.
static double func(double x_k)
{
double f = 0.01 * x_k * x_k * x_k * x_k - 0.03 * x_k * x_k * x_k - 0.45 * x_k * x_k + 0.3 * x_k - 1.0;
return f;
}
static double derivFunc(double x_k)
{
double derivF = 0.04 * x_k * x_k * x_k - 0.09 * x_k * x_k - 0.9 * x_k + 0.3;
return derivF;
}
static double findStepViaWolfeCondition(double x_k, double derivF)
{
double c1 = 0.1;
double c2 = 0.5;
double p_k = -derivF;
double slop = -c2 * derivF * derivF;
double step = 0.0;
double x = 0.1;
while (true)
{
//f(x_k+\alpha_kp_k)
double f_x_ap = func(x_k + step * p_k);
//f(x_k)+c_1\alpha_k\nabla f_k^Tp_k
double f_x = func(x_k) + c1 * step * derivF * p_k;
//\nabla f(x_k+\alpha_kp_k)^Tp_k
double derF_p_k = derivFunc(x_k + step * p_k) * p_k;
//$c_2\nabla f_k^Tp_k$
double c2_derF_p_k = c2 * derivF * p_k;
//Strong Condition
derF_p_k = abs(derF_p_k);
c2_derF_p_k = abs(c2_derF_p_k);
if (f_x_ap > f_x || derF_p_k > c2_derF_p_k)
{
step += 0.01;
continue;
}
else
break;
}
return step;
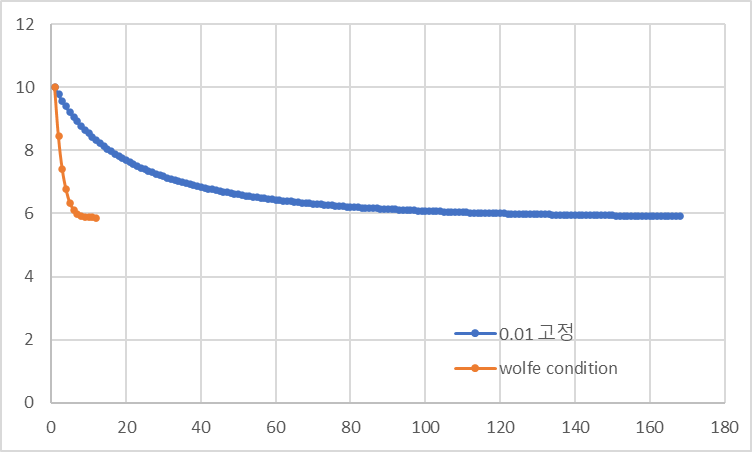
}인 경우에 결과를 보면, Wolfe Condition을 적용(Iteration 12회)했을 때, 고정했을 때(Iteration 168회)와 달리 10배 이상 빨리 수렴하는 것을 확인할 수 있습니다. 물론 조건에 따라 다르며, 추가적으로 step length를 찾는 부분이 들어갔기 때문에 리소스는 더 소모됩니다. 즉 trade off가 발생하기 때문에 적당한 선을 찾아야 합니다.