TurtleBot3 패키지 설치:
sudo apt update
sudo apt install ros-foxy-turtlebot3*
모델지정
echo "export TURTLEBOT3_MODEL=burger" >> ~/.bashrc
source ~/.bashrc
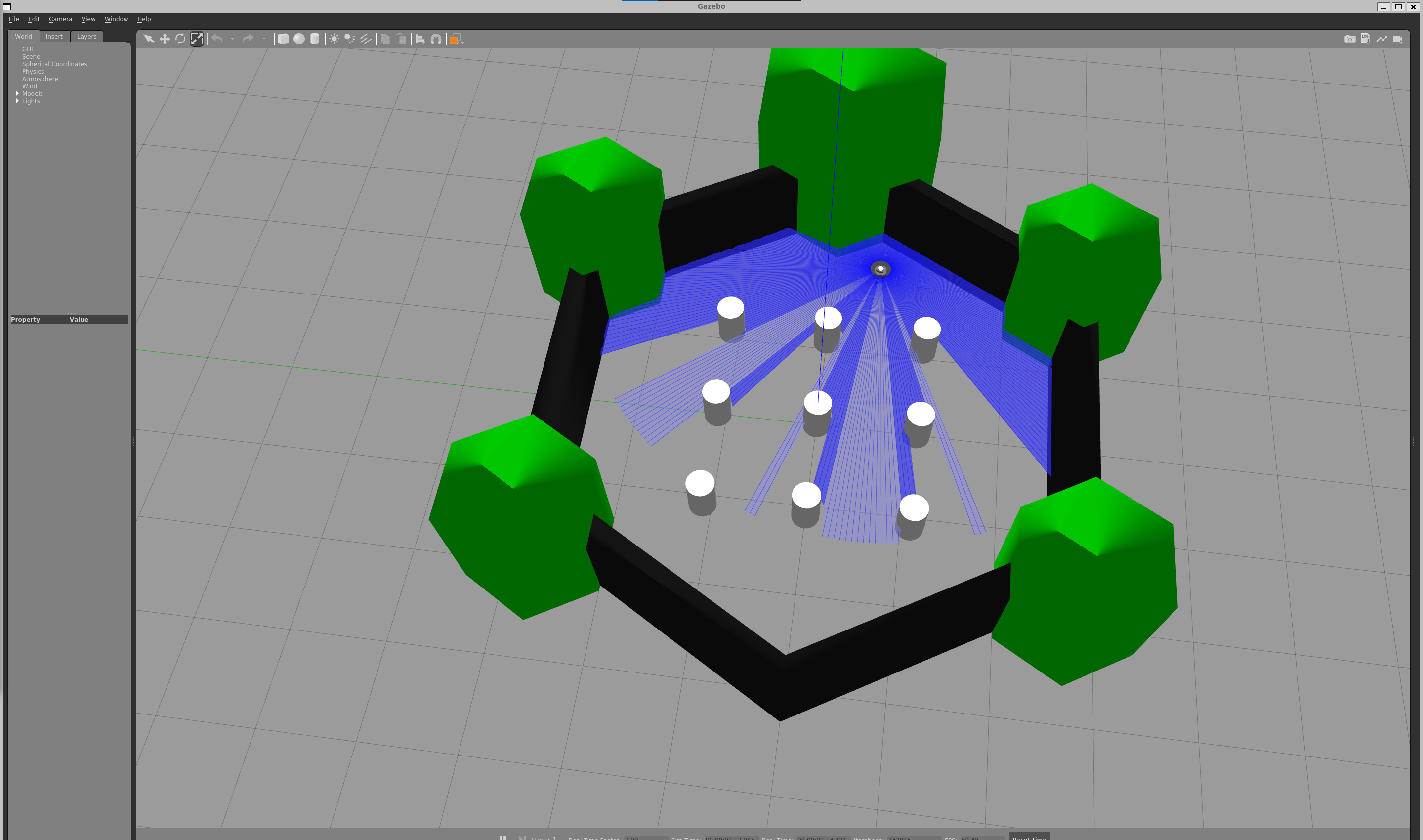
Gazebo 시뮬레이션 실행:
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
다른 터미널에서 Teleop(조작)
ros2 run turtlebot3_teleop teleop_keyboard
이렇게하면 이동하는 것이 가능함

..