Ubuntu on WSL
1.윈도우에서 ROS 설치#1_WSL2

Light Linux 를 진행한 후의 과정임.자료대로 입력하면 오류가 나는데 이는 "DownloadingString" method에서 URL 문자열에 <, > 의 특수문자를 사용해서 오류가 난것임따라서 특수문자 제거후 명령입력Powershell 관리자권한으로 재시
2.WSL2에서 우분투 20.04 설치
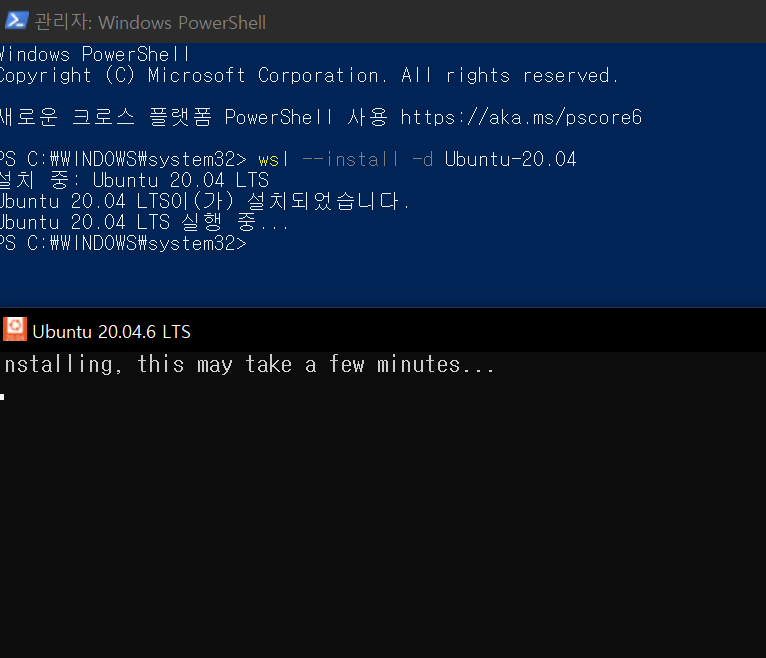
만일 WSL2로 설치되어 있지 않을 경우 이후 아래 코드 진행
3.ROS Noetic 설치
WSL(Windows Subsystem for Linux) 기능 활성화Windows 검색창에서 “Windows 기능 켜기/끄기”를 검색하고 실행“Windows 하위 시스템용 Linux”에 체크 후 확인 누른 뒤 재부팅WSL2 업데이트 및 기본 설정Microsoft 공식
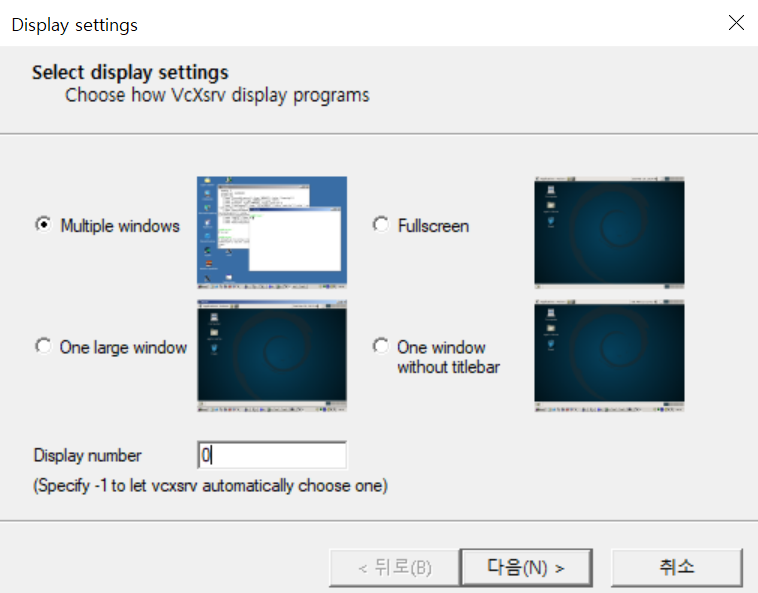
4.Gazebo Simulation
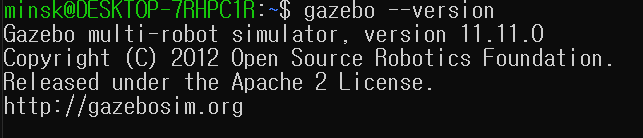
Gazebo는 오픈 소스 로보틱스 시뮬레이터로, 로봇 모델 및 물리 엔진, 센서, 3D 환경 등을 시뮬레이션 가능.ROS(로봇 운영체제)와 긴밀히 연동되어, 실제 로봇 프로그래밍과 거의 동일한 코드를 시뮬레이션 환경에서 테스트하는 것이 가능함.ROS Noetic에서는
5.ROS2 foxy 설치 on WSL2
WSL2에서 Ubuntu 20.04환경을 사용하여 ROS2 foxy버전을 설치하고자 한다.WSL2 및 Ubuntu 20.04 환경 준비WSL2 활성화Windows 10(빌드 2004) 이상 혹은 Windows 11에서 사용 가능PowerShell(관리자 권한)에서 아래
6.ROS2 foxy에서 Gazebo 설치

Ubuntu 20.04에서는 기본 리포지토리를 통해 Gazebo 11 버전을 주로 사용. ROS 2 Foxy와도 호환성이 좋음.Gazebo 공식 리포지토리 등록(선택사항)일반적으로 Ubuntu 기본 저장소에도 gazebo11이 있지만, 최신 패치가 반영된 버전을 사용하
7.ROS2 foxy에서 Gazebo 예제

이제 직접오브젝트를 만들어서 스폰 테스트를 해보자.spawn_entity.py 스크립트를 사용하면 직접 작성한 SDF/URDF 파일을 Gazebo에 불러온다.아래는 가장 간단한 SDF 예시인 “구(sphere)”를 스폰해 보는 데모이다.테스트 SDF 파일 작성spher
8.TurtleBot3 설치 및 예제
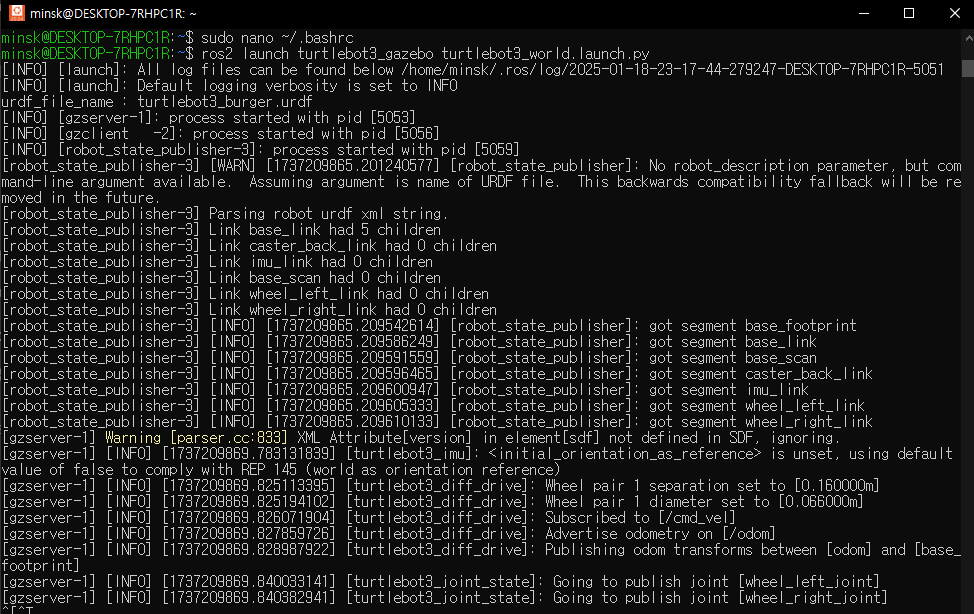
TurtleBot3 패키지 설치:모델지정Gazebo 시뮬레이션 실행:다른 터미널에서 Teleop(조작)이렇게하면 이동하는 것이 가능함
9.WSL2 Ubuntu 에서 CUDA_WSL2 GPU 드라이버 설치
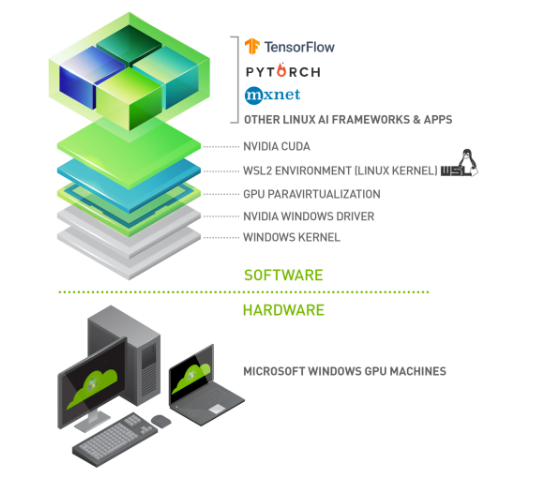
WSL을 돌리는 환경에서 내장 그래픽보단 외장 그래픽을 사용하여 컴퓨터의 성능을 100퍼 끌어내고 싶을 것이다.이를 위해서는 기존의 NVIDIA 그래픽 드라이버가 아닌 WSL용 NVIDIA 그래픽 드라이버를 사용해야한다.
10.예제
11.[Ubuntu] "Hash Sum mismatch" error
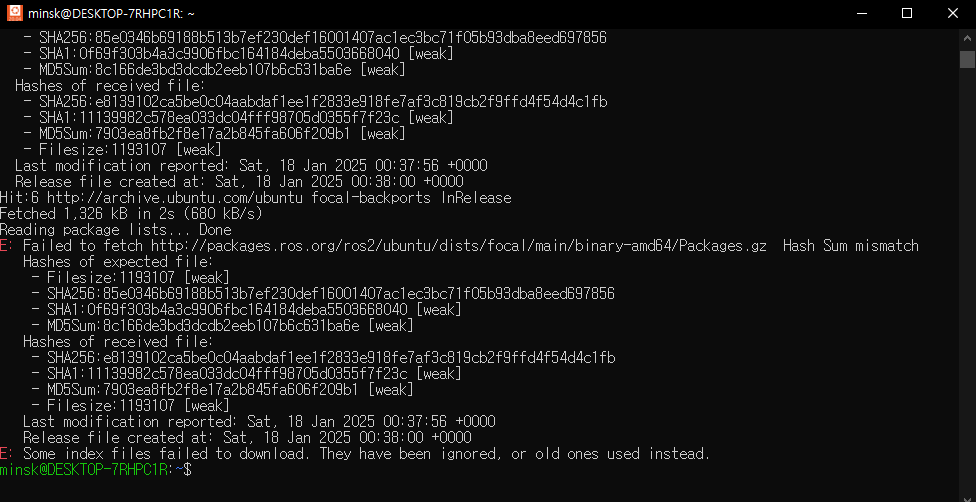
"Hash Sum mismatch" error usually indicates that APT’s local cache files are out of sync or corrupted compared to what the repository provides. It c