FLIR BFS machine vision camera start tutorial
Blackfly S GigE BFS-PGE-88S6C-C: 8.9 MP, 13.9 FPS
3.45 µm1"IMX26757.2371.32
검색할 때 주로 쓰는 모델명 - BFLY-PGE-23S6C
FPS, Sony IMX267, Color
1. setting
start
TELEDYNE FLIR 사이트에서 product support에 가보면
DOWNLOADS에 software와 online reference 둘이 나온다.
이 두 문서를 보고 시작한다. 감이 안온다면 언제나 공식 사이트로부터 ..
☝ **external trigger mode** 를 지원한다고 한다. LiDAR cam sink 맞추는 문제를 생각해보도록 하자.sensor connect
-
랜선으로 센서와 컴퓨터를 연결
-
사진을 참고해 network 설정-??

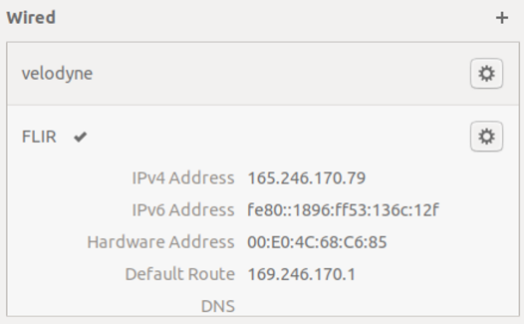
센서의 ip설정은 기본 ip가 센서 박스에 쓰여있거나 수정할 수 있는듯하다. 알아오는 방법은 잘 잡아주는 window에 가서 알아오기 .. 같은 방법이 있다.
추가: ip설정을 안하고 그냥 랜선을 물린 뒤 spinview를 켜서 Force ip 해줘도 잡는 듯하다. (라이다와 함께 랜허브를 쓰는 경우)
spinnaker SDK install
Linux > Ubuntu 18.04
spinnaker-2.6.0.157-Ubuntu18.04-amd64-pkg.tar.gz
amd로 다운로드 후 extract 하면 내부에 sh 파일이 있다.
terminal에서 sh 파일이 있는 곳까지 이동 후 sudo sh.
cd /Downloads/spinnaker-2.6.0.157-Ubuntu18.04-amd64-pkg/spinnaker-2.6.0.157-amd64
sudo sh install_spinnaker.sh잘 설치됐다면 spinview를 실행해서 카메라 영상을 볼 수 있다.
sudo sudo spinview
or
spinveiw안된다면 메뉴로 들어가서 아이콘을 직접 클릭하거나 reboot한다.
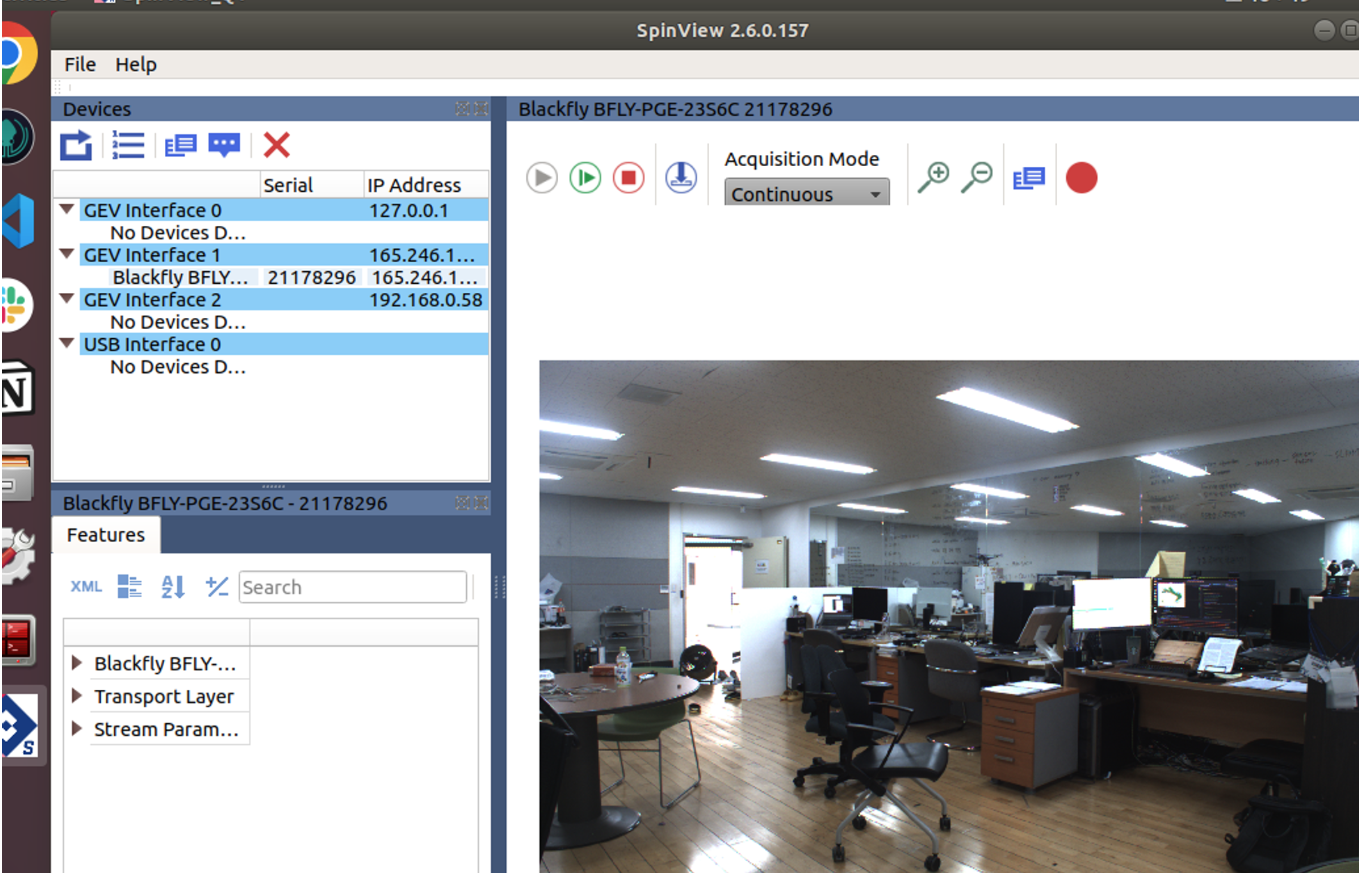
spinview 실행 화면 - interface 부분에 설정한 ip와 camera 이름이 뜬다.
python-spinnaker install
python 코드에서 쓰기 위해서 이것도 설치
Linux > Ubuntu18.04 > python
spinnaker_python-2.6.0.157-Ubuntu18.04-cp36-cp36m-linux_x86_64.tar.gz
cp36은 python version 3.6을 의미한다.
내 컴퓨터에서 python3 version 을 확인하니 3.6이어서 그대로 진행.
aarch 가 아닌 x86_64로 다운로드 후 extract하면 내부에 whl 파일이 있다.
PySpin에 대한 라이브러리 종속성 설치
sudo python3.6 -m pip install --upgrade numpy matplotlib
이번에도 당연히 whl파일이 나오는 곳까지 들어가서 설치 명령을 한다.
- Python 3.6, site wide:
sudo python3.6 -m pip install spinnaker_python-2.x.x.x-cp36-cp36m-linux_x86_64.whl
- Python 3.6, user only:
python3.6 -m pip install --user spinnaker_python-2.x.x.x-cp36-cp36m-linux_x86_64.whl2.x.x.x 부분은 내 파일과 맞춰준다.
이제 import PySpin을 쓸 수 있다..!
