Velodyne LiDAR start tutorial
ubuntu 18.04
ROS melodic
velodyne 16ch
velodyne pkg 설치
sudo apt-get install ros-melodic-velodynePCL 라이브러리 설치
ROS를 설치하면 기본적으로 pcl 패키지가 따라온다고 한다. 아래 명령어로 버전 확인 가능.
dpkg -s libpcl-dev | grep 'Version'
Version: 1.8.1+dfsg1-2ubuntu2.18.04.1 없다면 불쌍하게 깔면 된다.
pcl 설치는 이 문서를 참고.
https://github.com/PointCloudLibrary/pcl
센서 연결
라이다를 이용하기 위해 필요한 것: 센서로의 전원 연결, 랜선으로 컴퓨터와 연결
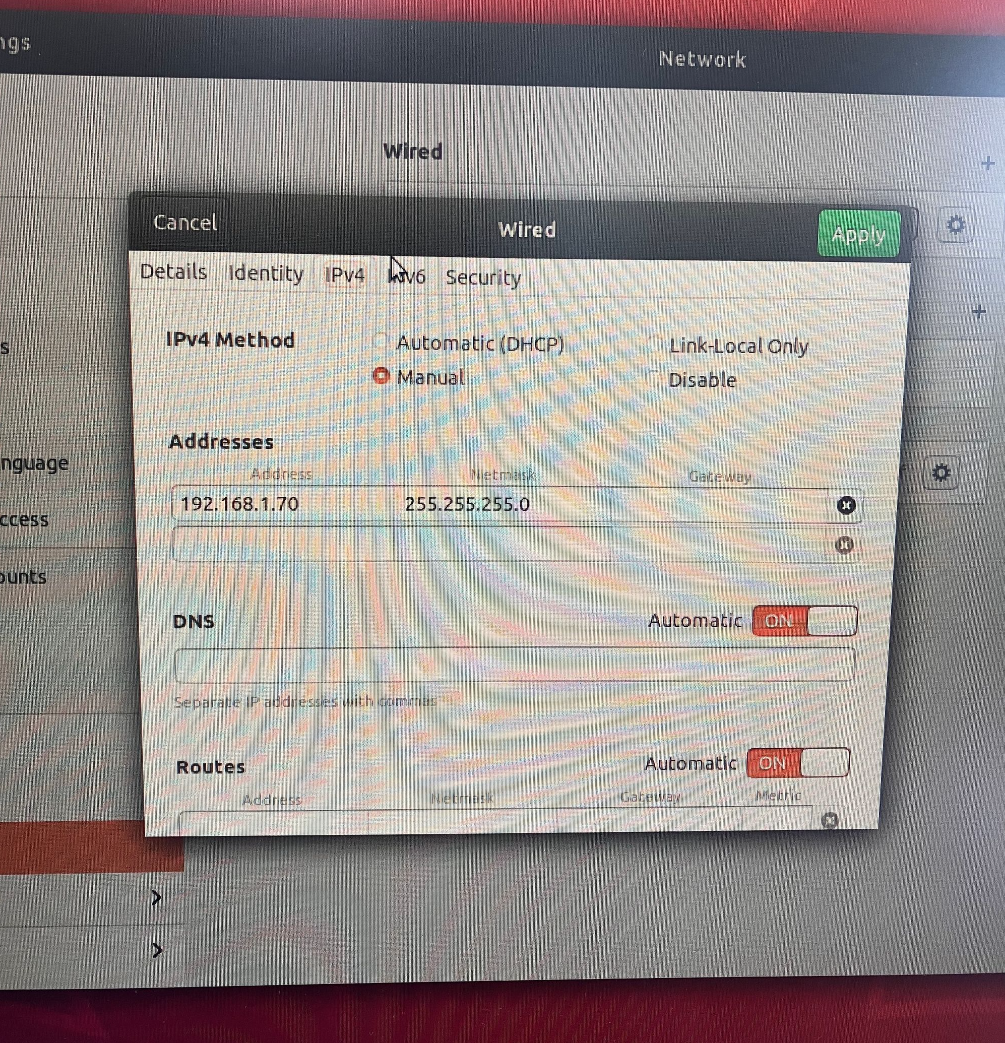
우분투에서 랜선 설정에 들어가 IPv4→manual 선택하고
IP 주소를 192.168.1.72 으로 설정했다. 사람마다 달라야 한다.
Netmask 255.255.255.0
Gateway 0.0.0.0 다른 문서를 보면 보통은 이렇게 설정한다.
Routes → ✅use this connection only for resources on its network →apply
- 주의 - velodyne poll() timeout : ip설정이 잘못되면 주로 뜬다.
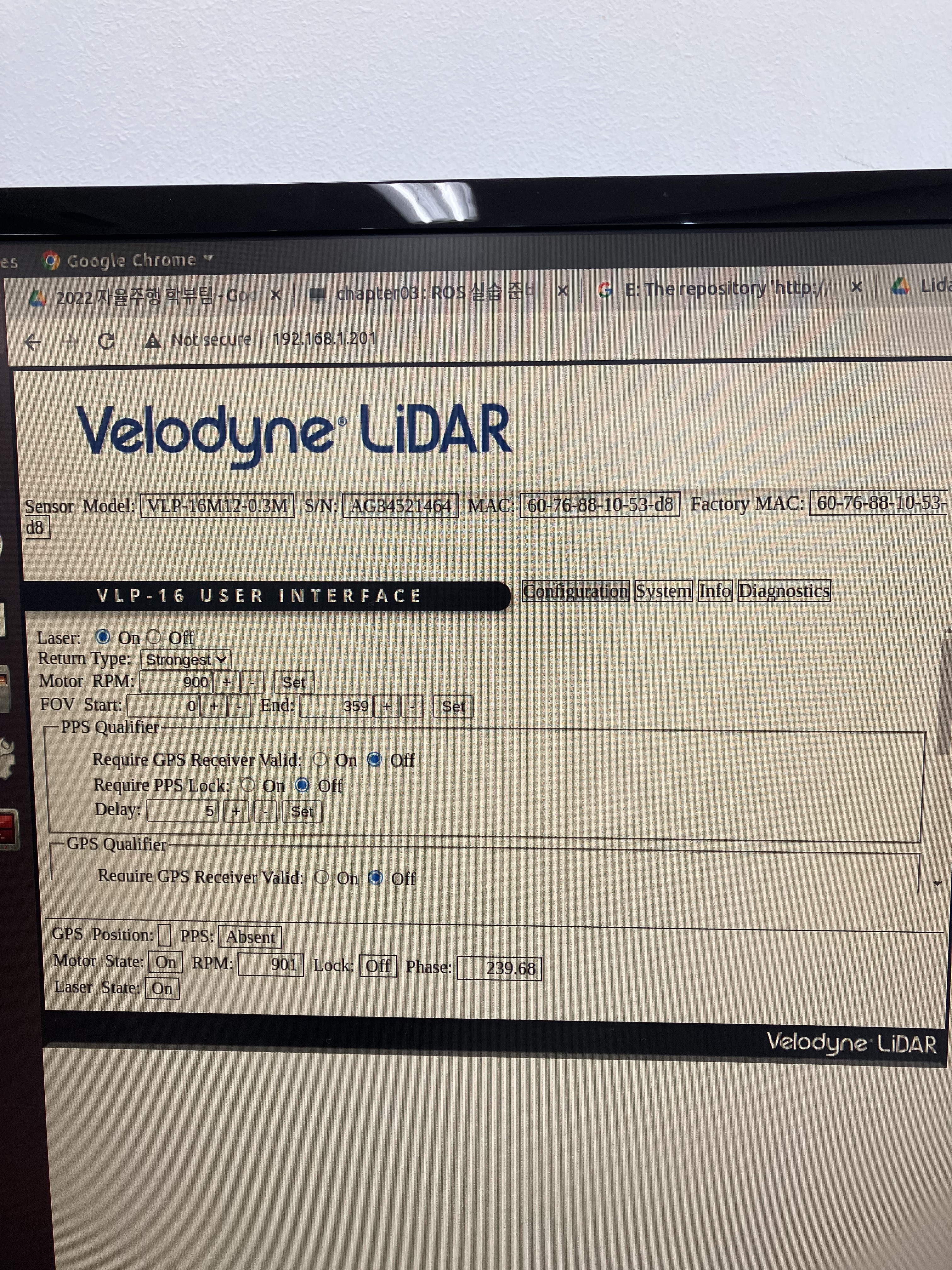
그 다음 인터넷 주소창에 192.168.1.201 이라고 쳐서 들어간다.
이 주소는 벨로다인16 의 기본 설정된 IP이다.
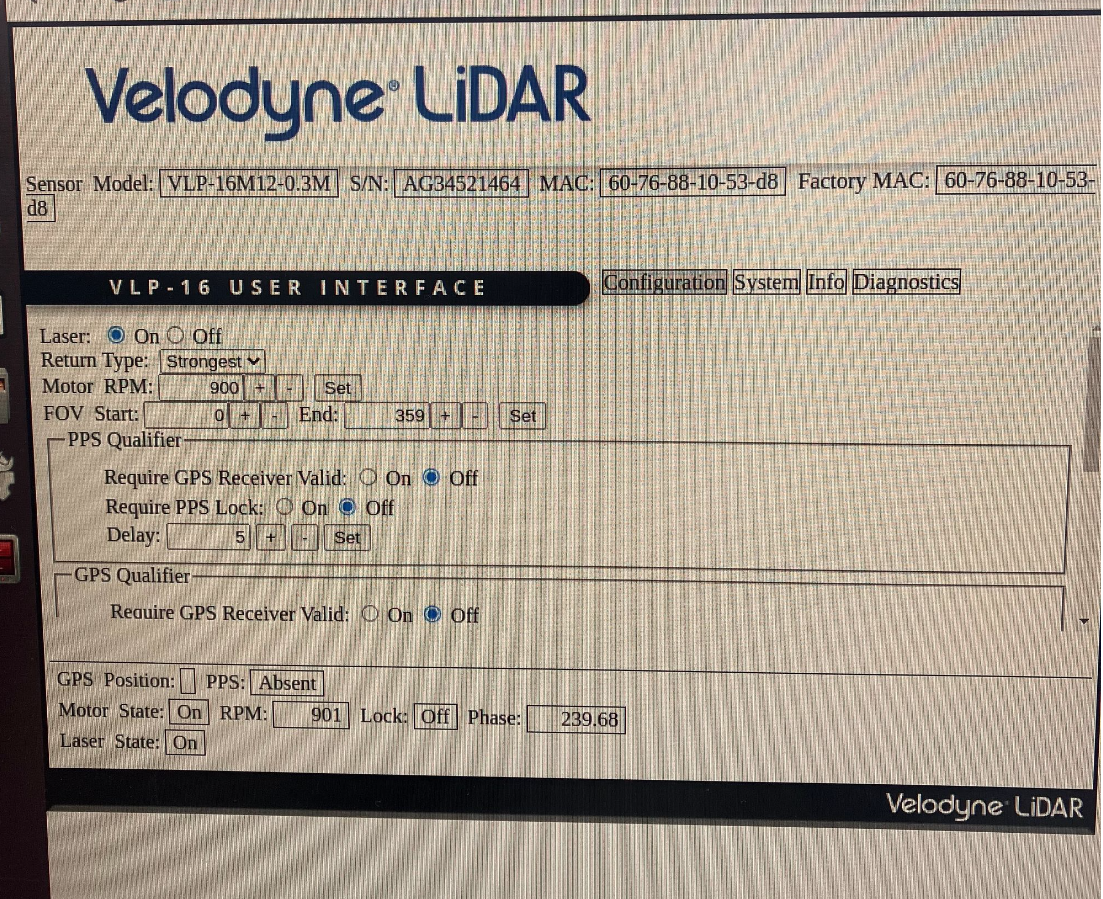
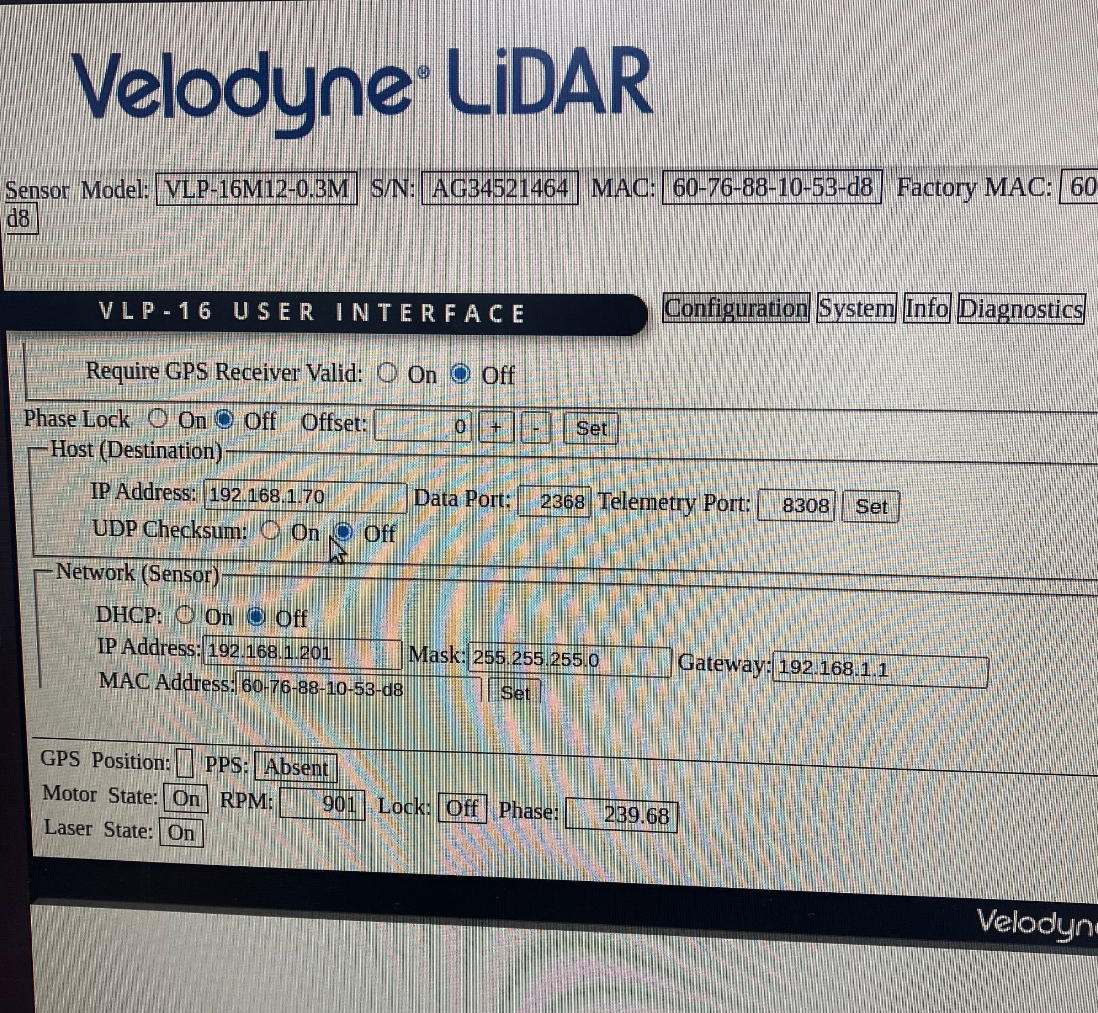
Host → 아까 컴퓨터의 네트워크 설정에서 LiDAR 연결한 ip (타인과 겹치지 않게 한다)
IP: 192.168.1.72 Data Port: 2368 (이건 고정값)
✅set
Network →이건 라이다
IP: 192.168.1.201 Mask 255.255.255.0
✅save configuration
라이다 전원을 켰는지도 꼭 확인하도록 하자 ..^^
VLP 확인
roslaunch velodyne_pointcloud VLP16_points.launch
rqt_graph
rostopic echo /velodyne_points
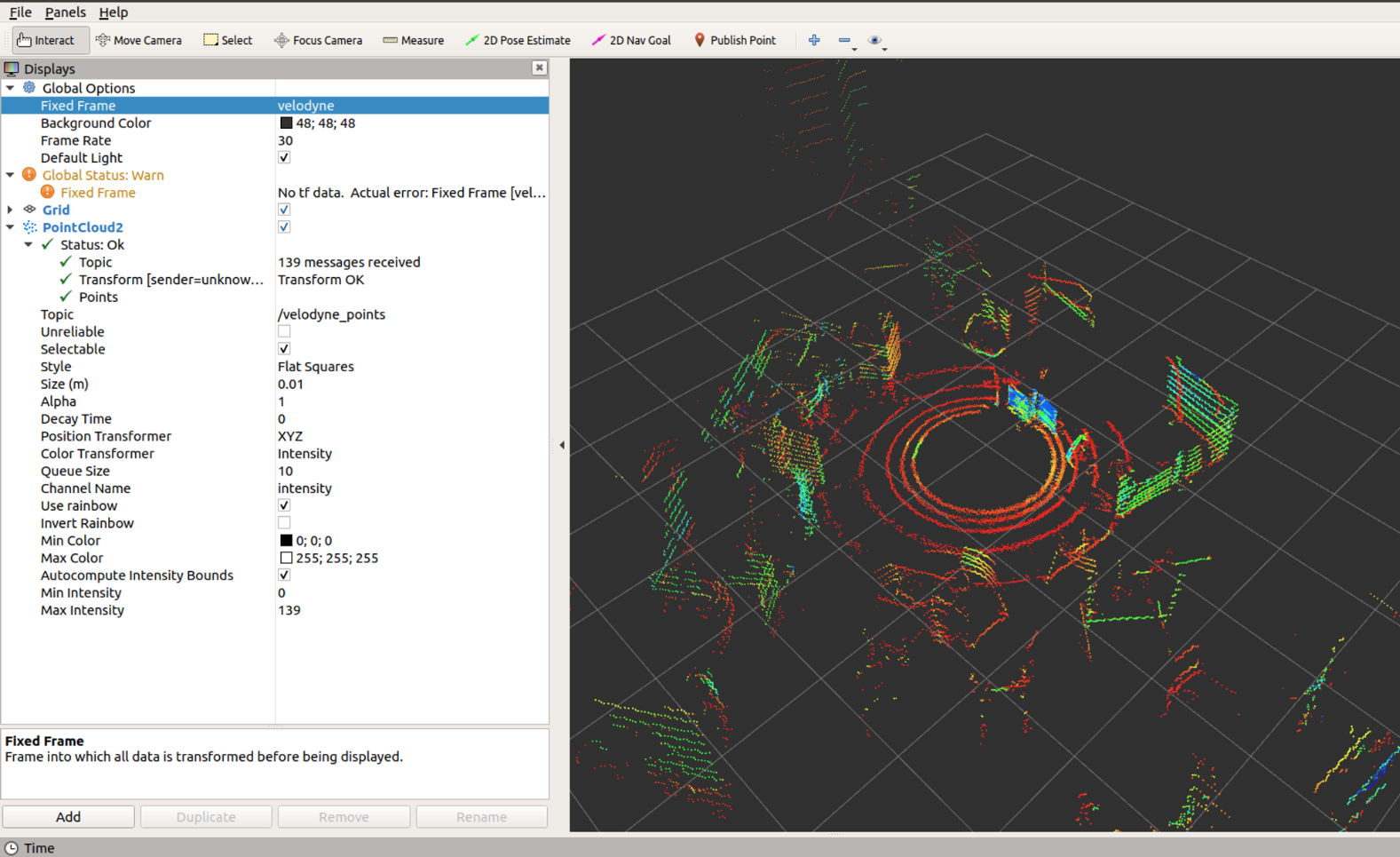
rvizERROR!
rviz를 켜서 velodyne point를 추가하면
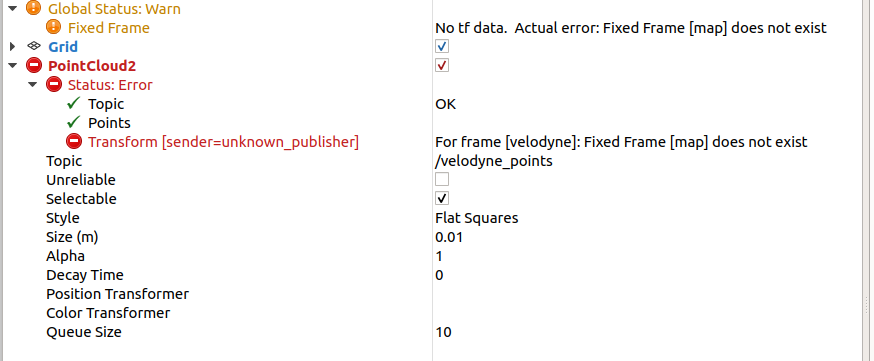
처음에 이런 에러가 뜬다.
Global Options에서 Fixed Frame에서 map→velodyne으로 바꿔주면 정상적으로 작동한다.
Fixed Frame을 바꾸는 기준은 에러 메세지에서 For frame [ ] 안에 들어있는 문자열.