Carla with ROS bridge
nvidia-docker 설치
sudo apt install -y nvidia-docker2
sudo systemctl daemon-reload
sudo systemctl restart dockerX11 포워딩
xhost +local:rootcarlaserver
docker run --rm --privileged --gpus all --runtime=nvidia --net=host -e DISPLAY=$DISPLAY carlasim/carla:0.9.13 /bin/bash ./CarlaUE4.sh-RenderOffScreen 옵션을 추가해 off screen mode로 실행할 수 있다.
docker run --rm --privileged --gpus all --runtime=nvidia --net=host -e DISPLAY=$DISPLAY carlasim/carla:0.9.13 /bin/bash ./CarlaUE4.sh -RenderOffScreen-quality-level=Low 옵션을 추가해 Low quality로 실행할 수 있다.
carla ROS bridge
docker run
docker run -it --privileged --gpus all --runtime=nvidia --net=host -e DISPLAY=$DISPLAY introlab3it/rtabmap_ros:melodic-latestrtabmap_ros를 사용하지 않는 경우 ros가 설치된 다른 이미지를 사용해도 무방하다.
install carla-ros-bridge
ROS가 설치된 container 내부에서
apt update && apt install python-pip python-catkin-tools
python -m pip install --upgrade pip
source /ros_entrypoint.sh
apt-key adv --keyserver keyserver.ubuntu.com --recv-keys 1AF1527DE64CB8D9
add-apt-repository "deb [arch=amd64] http://dist.carla.org/carla $(lsb_release -sc) main"
mkdir -p ~/carla-ros-bridge/catkin_ws/src
cd ~/carla-ros-bridge/
git clone --recurse-submodules https://github.com/carla-simulator/ros-bridge.git catkin_ws/src/ros-bridge
cd catkin_ws/
rosdep update && rosdep install --from-paths src --ignore-src -r
catkin build
pip install carla==0.9.13
pip install pygame
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
echo "source /root/carla-ros-bridge/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc실행
carlaserver를 실행한(docker run) 상태에서
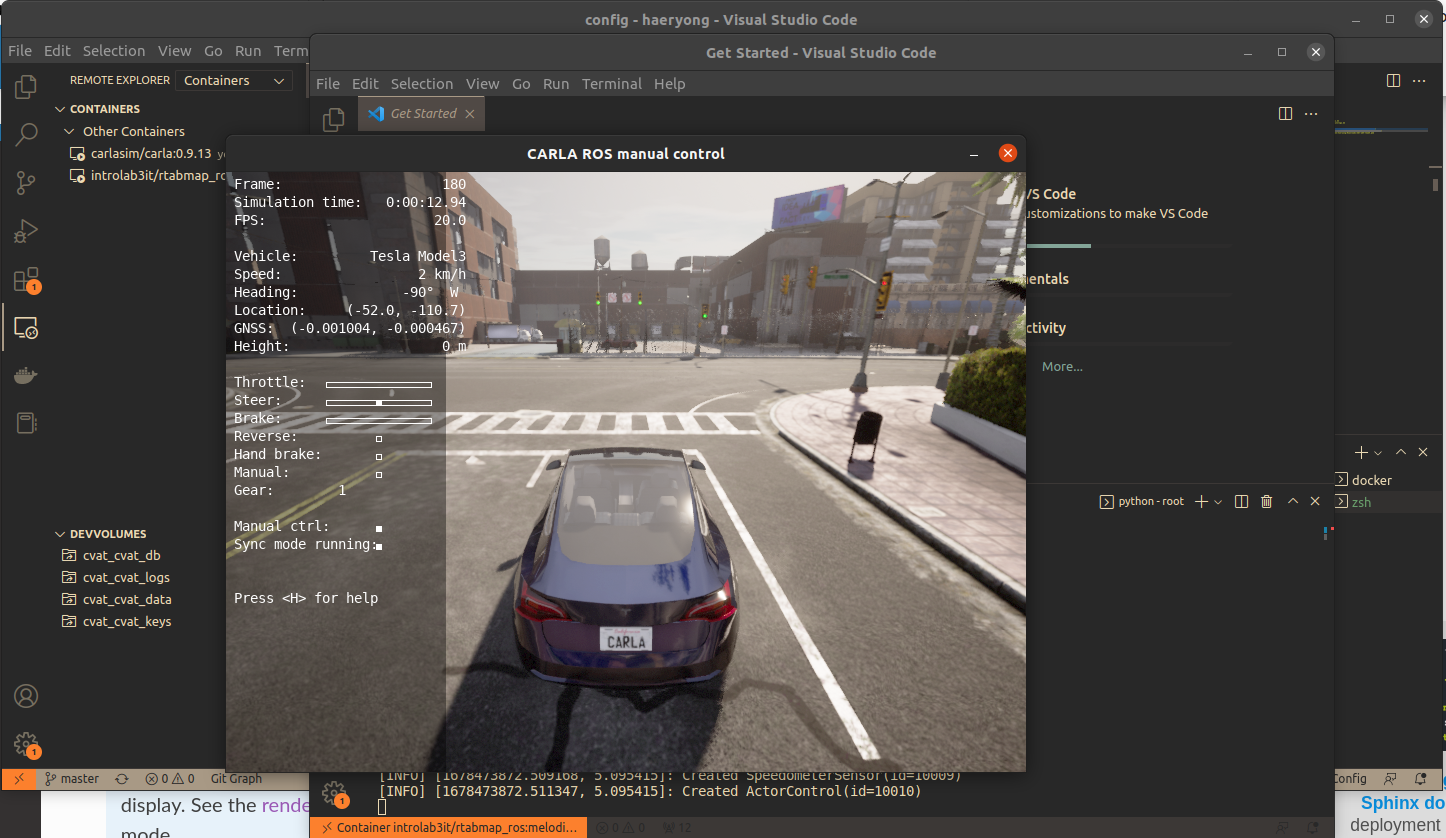
roslaunch carla_ros_bridge carla_ros_bridge_with_example_ego_vehicle.launchB키를 누르면 manual control이 가능하고, P키를 누르면 autopilot모드로 실행가능하다.
Rtabmap
/root/carla-ros-bridge/catkin_ws/src/ros-bridge/carla_spawn_objects/config/objects.json
에서
"type": "sensor.camera.depth",
"id": "depth_front",
"spawn_point": {"x": 2.0, "y": 0.0, "z": 2.0, "roll": 0.0, "pitch": 0.0, "yaw": 0.0},
"fov": 90.0,
"image_size_x": 800,
"image_size_y": 600로 image size (800, 600)으로 변경.
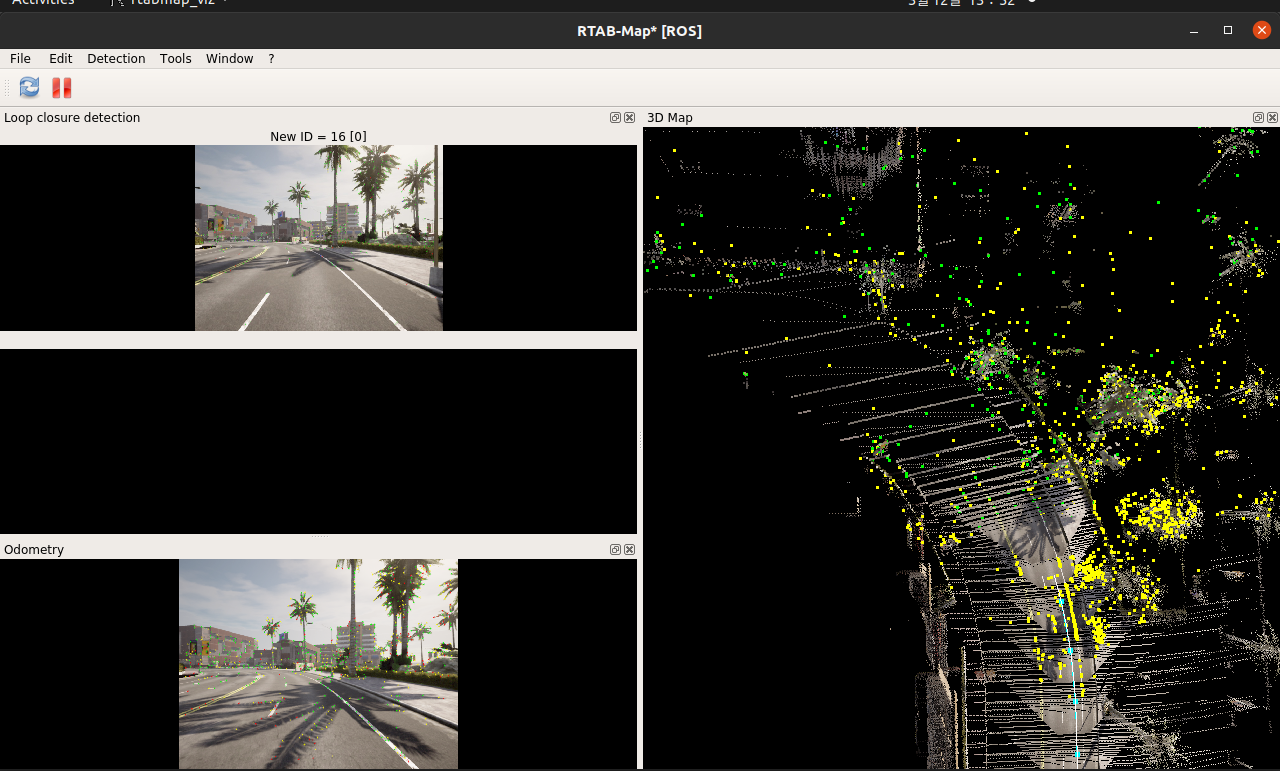
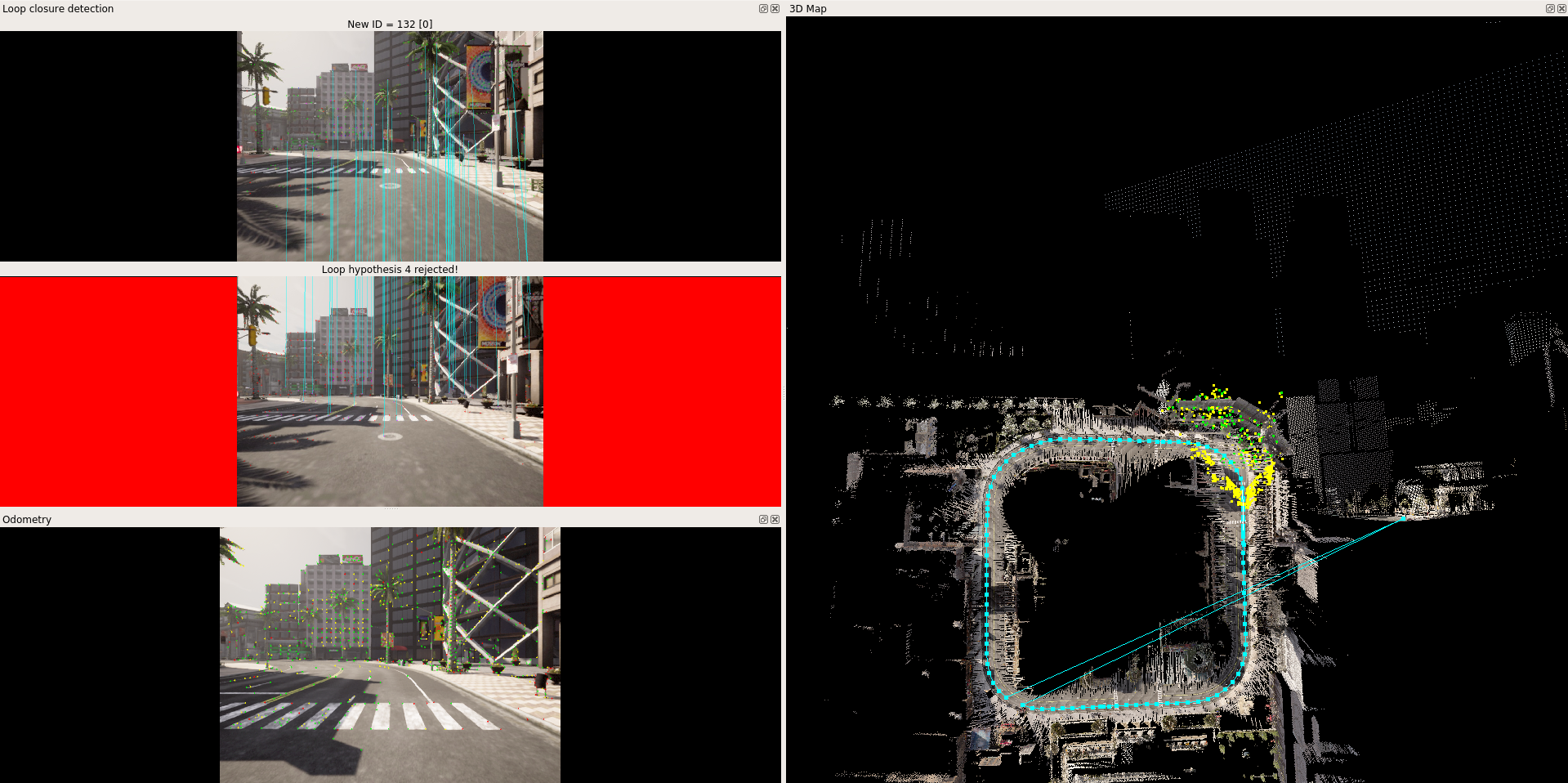
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start --Optimizer/GravitySigma 0.3" depth_topic:=/carla/ego_vehicle/depth_front/image rgb_topic:=/carla/ego_vehicle/rgb_front/image camera_info_topic:=/carla/ego_vehicle/rgb_front/camera_info depth_camera_info_topic:=/carla/ego_vehicle/depth_front/camera_info approx_sync:=false frame_id:=ego_vehicle/rgb_front