Multi-step TD
Model-Free prediction
MDP를 모르는 경우에도 어떻게 prediction을 하고 어떻게 control을 할지.
prediction은 value를 찾는 문제. MC와 TD가 있다.
MC(Monte-Carlo Leanring)
에피소드를 끝까지 수행하고 얻은 결과에 대해 평균으로 value를 취한다. 실제 수행한 값의 평균을 취한다.
- 목표: Policy 를 따라 수행한 에피소드로 부터 를 학습하는것
- return은 discounted reward의 총합

- 는 실제 에피소드가 끝나고 얻은 반환 값 을 향해 업데이트
TD(Temporal-Difference Learning)
 에피소드를 끝까지 수행하지 않고, 추측한 값을 통해 보상을 업데이트 하는것.
에피소드를 끝까지 수행하지 않고, 추측한 값을 통해 보상을 업데이트 하는것.
: 한스텝 앞(t+1)을 보고 현재(t)의 를 업데이트 하는것. n-step TD는 N 스텝 앞을 보고 현재의 를 업데이트 하는것. 현재의 가치를 예측한 추측값을 한스템 더 가서 추측한 값으로 업데이트를 하는것.
- TD target:
- TD error:
MC와 TD의 차이
MC
- complete
- function approximation에서 에수렴을 잘한다.
- 초기값에 덜 민감
- 사용과 이해에 편하다.
TD는
- in-complete
- function approximation에서 에 수렴을 못할 수도 있다.
- 초기값에 민감
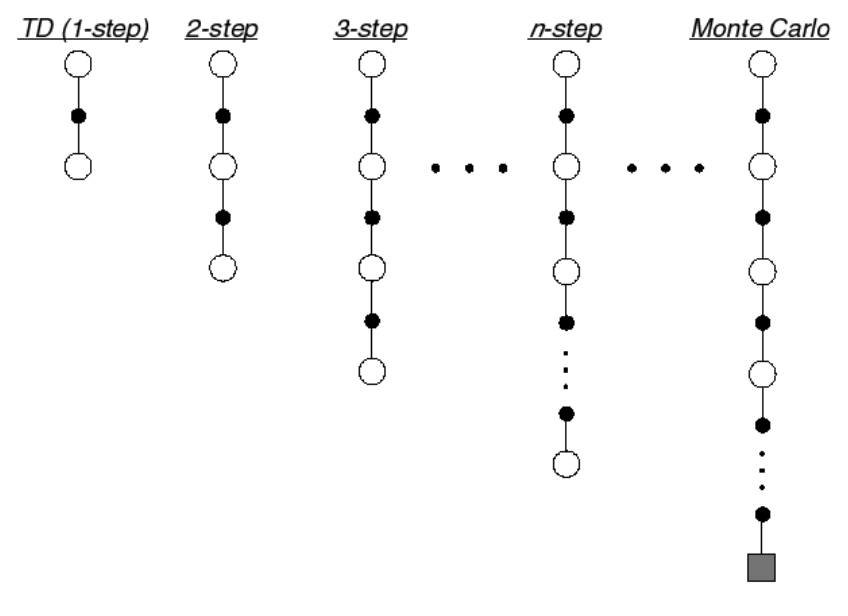
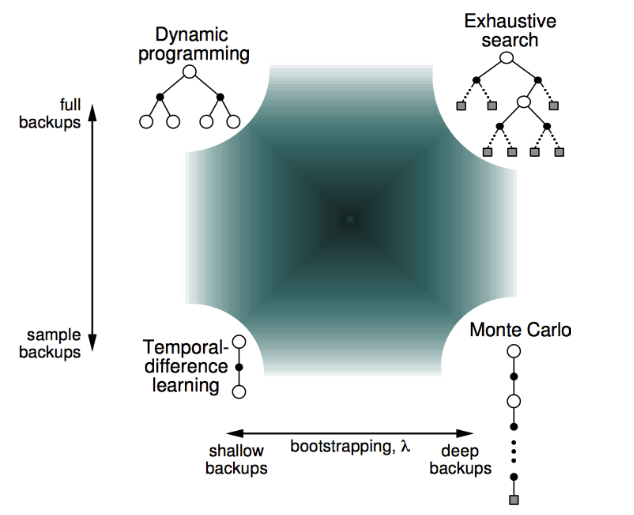
N-Step TD
- Bootstrapping: 추측치로 추측치를 업데이트 하는것을 bootstrapping 이라 한다. 업데이트에 etstimate가 포함된다. (Depth 관점)
- Sampling: 탐색에 있어 너비에 대해 샘플링 하였는지. (Width 관점)
N-step TD
N 스텝의 값으로 업데이트를 하는것이 n-step TD
TD와 MC의 반환값
- n=1 (TD) ----
- n=2 ----
... - n= (MC) ----
n-step의 반환값
이외의 TD
- Average n-step
- TD(
- forward-view TD(
- backward-view TD(
업데이트 방법
- Online: 에피소드의 매 스텝마다 업데이트가 되는것
- Offline: 에피소드가 끝나고 난 후 업데이트 되는것
Reference
- David Silver, RL lecture4: model-free prediction
- Random Walk Codee
- 팡요랩 강의