CAN
1.CAN 통신

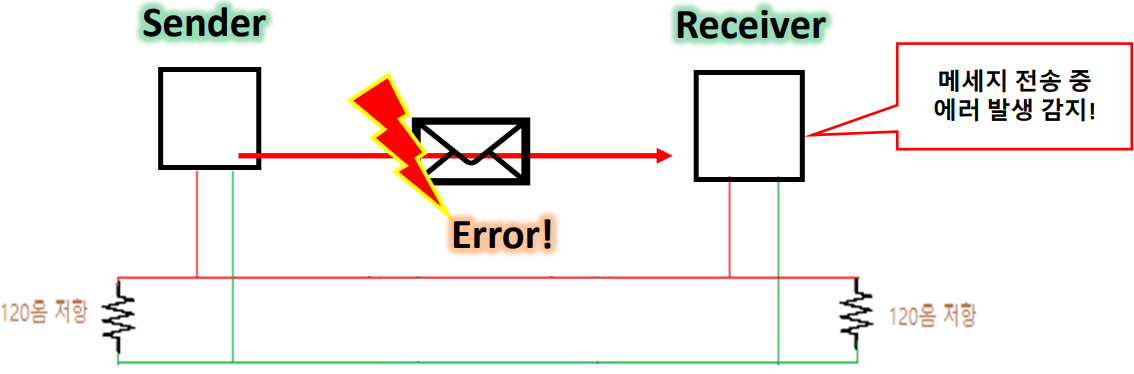
CAN 통신 토폴로지 & 전송방식 CAN 통신 등장 배경 및 특징 통신이란? -> 서로 다른 두 주체가 정보를 주고받는것 정보를 주고받기 위해선 매채가 필요함 CAN 통신은 버스형 토폴로지 빨간선: CAN High, 녹색선: CAN Low 가운데 공통으로 두고
2024년 7월 31일
2.CAN 메세지와 시그널
CAN 메세지 내부에는 Transmitter, Receiver 정보가 따로 없다받는 제어기 입장에서의 문제점: 모든 메세지가 브로드캐스트 방식으로 전송이 되니 다른 제어기들이 어떤 메세지를 보낼 때마다 그 메세지들이 전부 수신이 됨하지만 메세지 안에 그 메세지를 누가
2024년 8월 1일
3.보충 설명

낮은 Baud Rate선 하나가 끊어져도 통신이 가능한 장점캔 저항이 제어기마다 달려있음현재는 거의 사용되지 않는다High Speed CAN의 낮은 BaudRate과 작은 Data영역 보완한 것이 핵심Data 영역 속도 최대 8Mbps Data / 영역 크기 최대 64
2024년 8월 9일
4.CAN통신 정리 & 마무리
CAN은 버스형 토폴로지. 제어기 연결, 제거가 쉽다
2024년 8월 12일
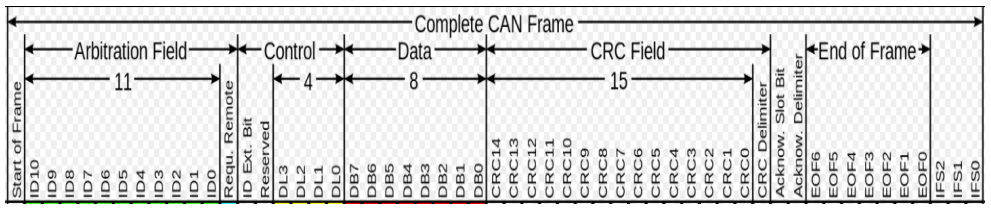
5.CAN 에러 처리
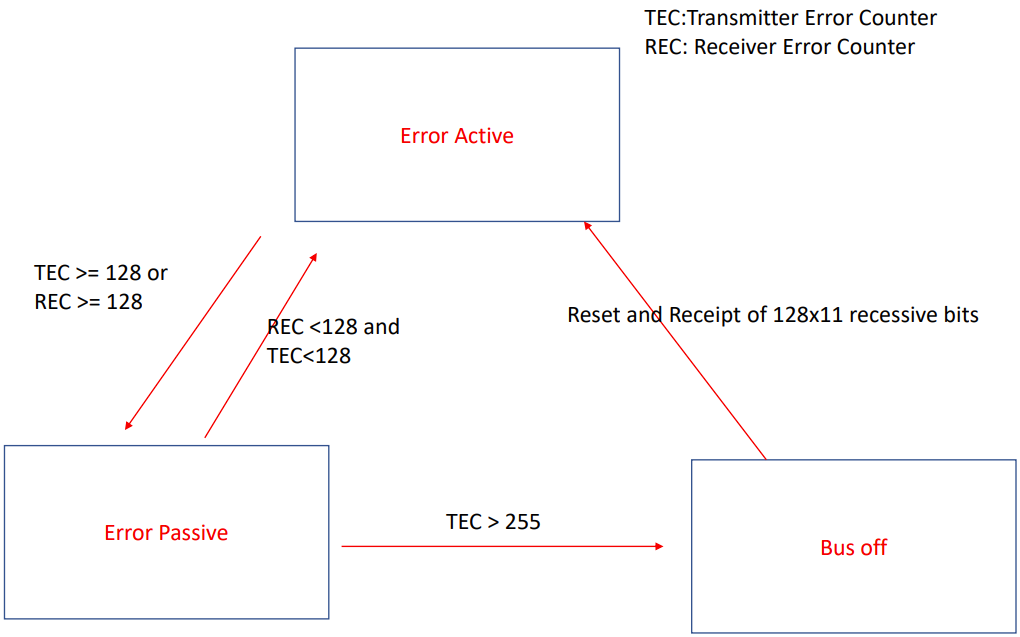
Error의 종류 및 마무리 Bit Error 내가 보낸 bit를 바로 읽어 봤을 때 bit가 다르면 에러로 감지하는 것 1을 보냈는데 0, 0을 보냈는데 1인 경우 에러로 감지 예외) arbitration 과정에서는 내가 1을 보냈지만 0이 나올 수 있다.
2024년 8월 9일
6.E2E Protocol
E2E 프로토콜 개념 E2E 카운터 개념 E2E 프로파일 개념 CRC 기초 개념 E2E에서의 CRC활용 개념 E2E Data ID 개념 E2E 관련 기타
2024년 8월 20일