다음은 UC Berkely online-course CS285의 Assignment3에 대한 내용입니다.
Assignment3
1. TD-Learning Bias
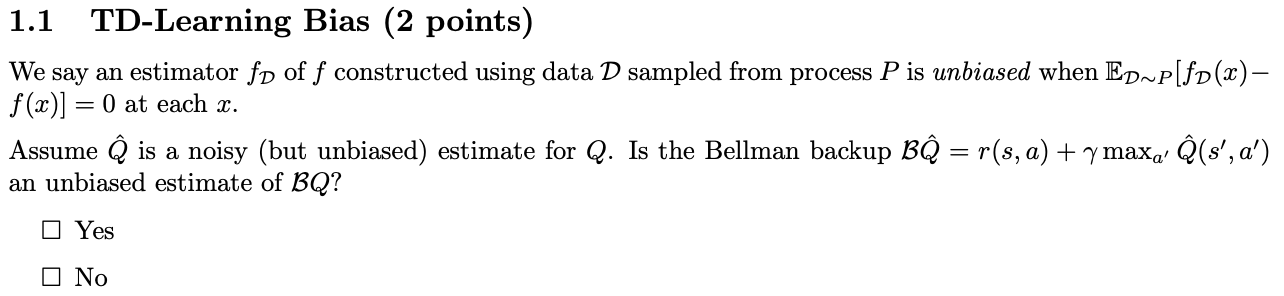
Q^이 unbiased estimator라면, E[Q^]=Q이다.
따라서 Bellman Backup을 적용한 BQ^=r(s,a)+γmaxa′Q^(s′,a′)에서 max Q^ 역시 unbiased 하는지가 문제이다.
그러나 "Q^이 noisy (but unbiased) estimate for Q"라고 했기 때문에, 다음 수식이 성립한다.
E[a′maxQ^(s′,a′)]≥a′max(E[Q^(s′,a′)])=a′maxQ(s′,a′)
이는 Q^가 각 s′와 a′에서 Q의 unbiased estimate라고 하더라도, max 연산을 취함으로써 동치가 아닐 수 있다는 가능성이 발생한다는 것을 의미한다. 즉, max 연산이 비선형적이기 때문에 발생하는 현상이다.
비선형 연산의 특성
max 연산은 비선형적이다. 이는 max(X,Y)의 기대값이 항상 max(E[X],E[Y])보다 크거나 같음을 의미한다. 이를 통해, 기대값과 최대값 연산의 순서를 바꿀 수 없음을 알 수 있다.
예를 들어, 두 개의 독립적인 확률 변수 X와 Y가 있을 때,
E[max(X,Y)]≥max(E[X],E[Y])
이 성립한다. 이로 인해, E[maxa′Q^(s′,a′)]는 maxa′Q(s′,a′)보다 크거나 같게 된다.
Bellman Backup 연산의 영향
Bellman Backup 연산은 강화 학습에서 가치 함수 Q를 업데이트하는 방법으로, 다음과 같이 정의된다.
BQ^=r(s,a)+γa′maxQ^(s′,a′)
여기서 Q^가 Q의 unbiased estimate일 때, BQ^가 BQ의 편향 없는 추정치가 되는지 확인해보자. r(s,a)는 return function이고, γ는 discount factor이다.
Q^가 Q의 unbiased estimate라면,
E[Q^(s′,a′)]=Q(s′,a′)
이 성립한다. 그러나, max 연산을 적용하면,
E[a′maxQ^(s′,a′)]≥a′max(E[Q^(s′,a′)])=a′maxQ(s′,a′)
이 성립한다. 이는 max 연산이 비선형적이기 때문이다.
결론
max 연산의 비선형성 때문에 BQ^는 BQ의 편향 없는 추정치가 될 수 없다. 따라서, BQ^는 BQ의 unbiased estimate가 아니다. 그래서 정답은 < NO >
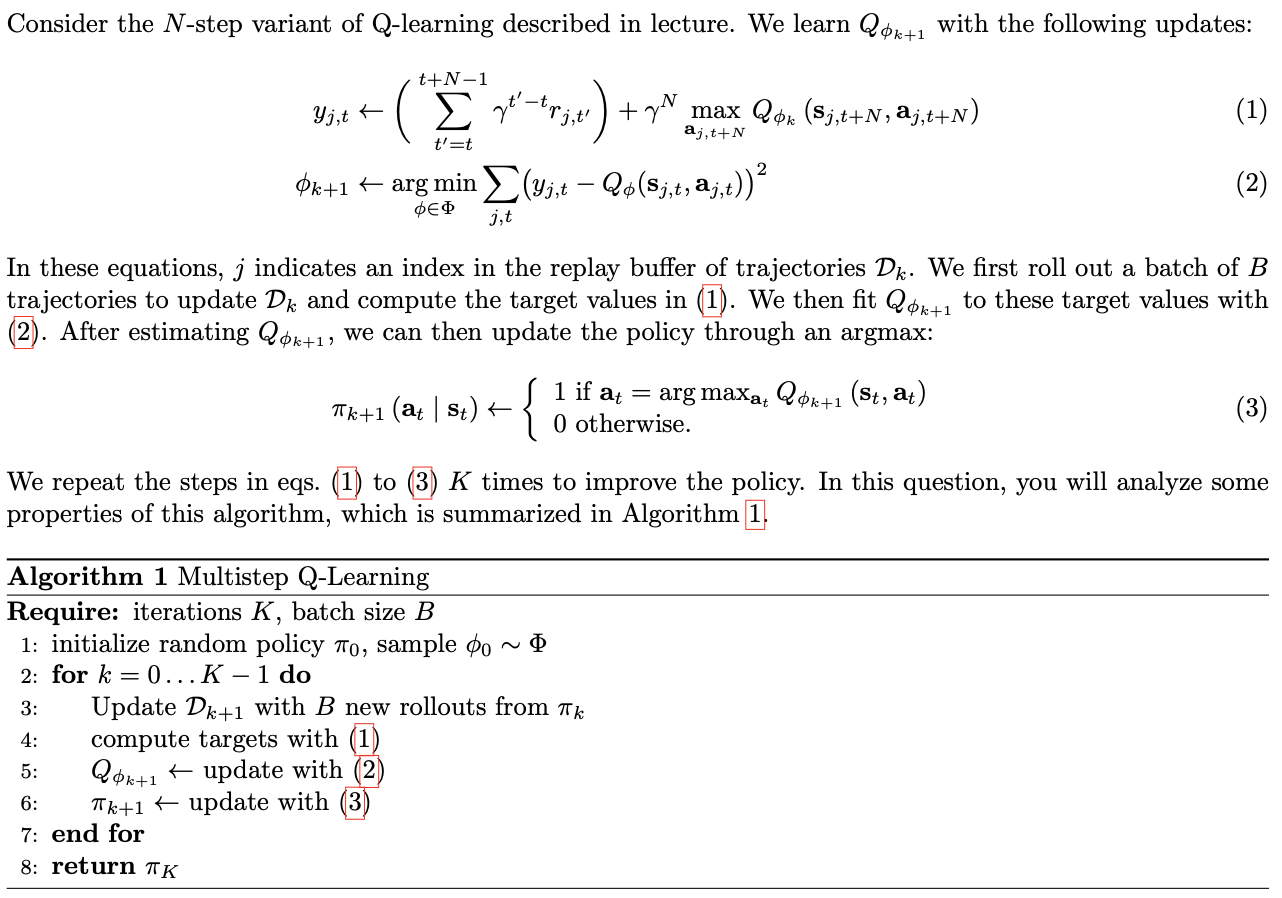
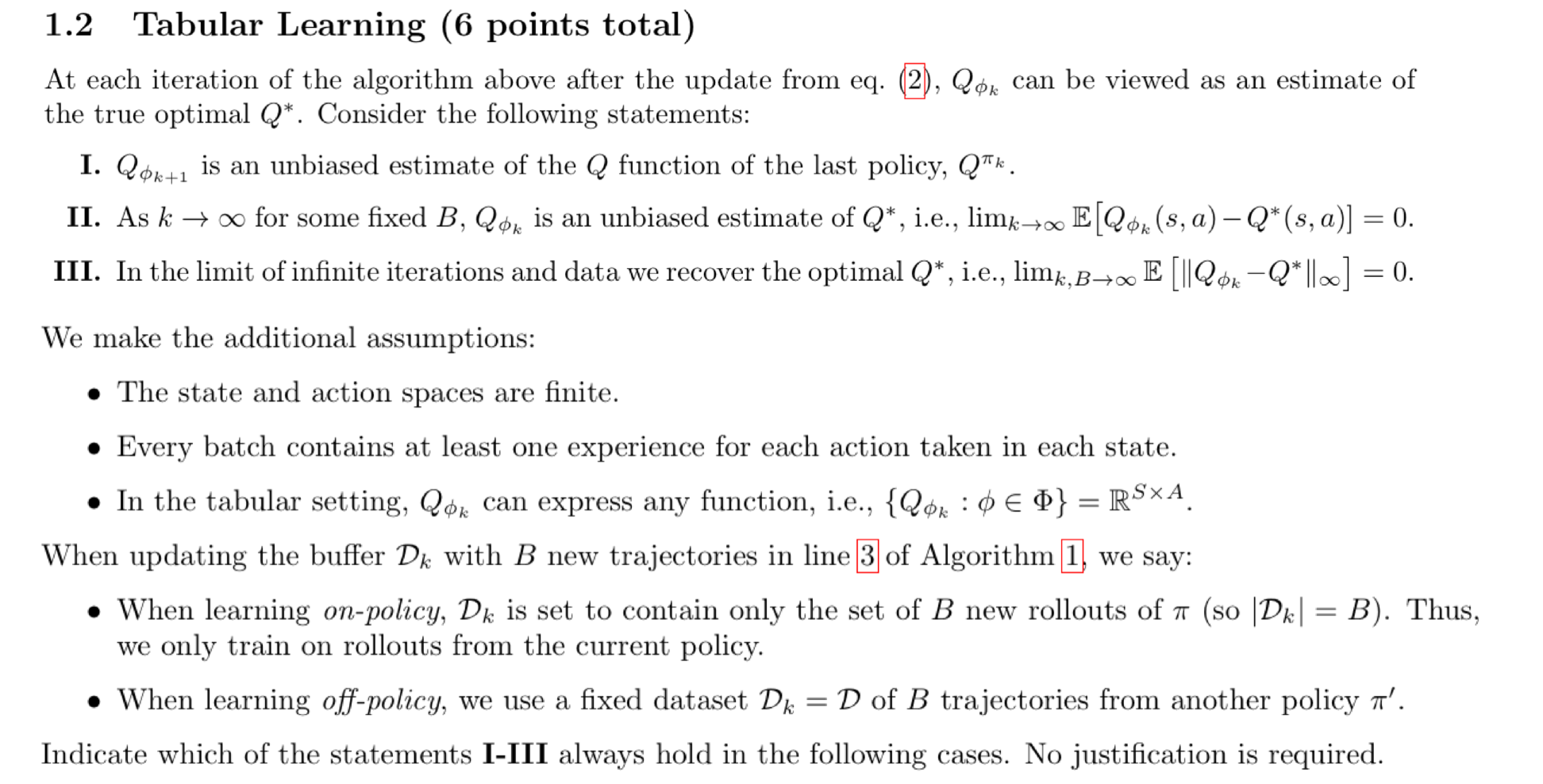
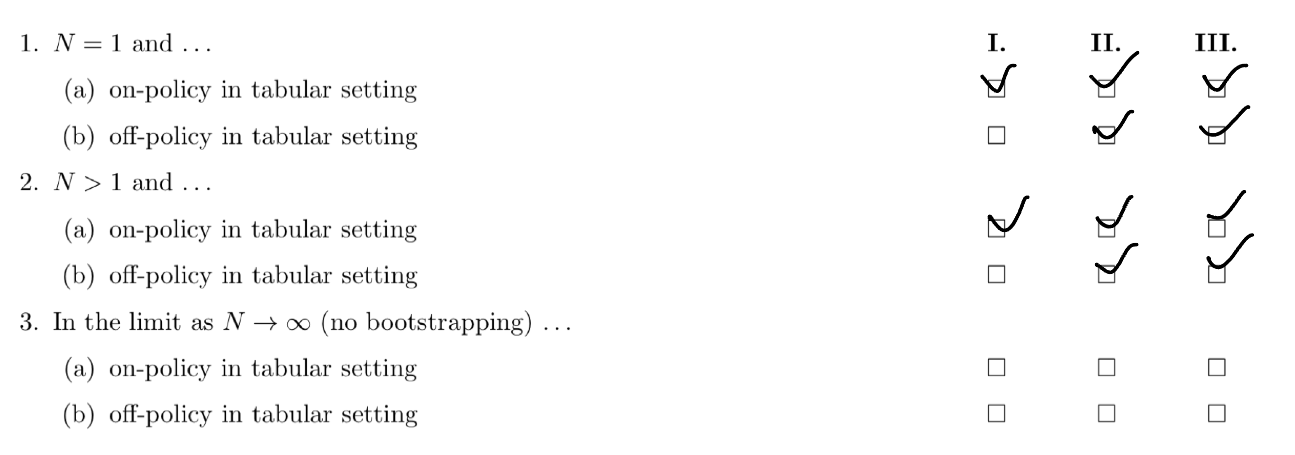
2. Tabular Learning
풀이
State I: Qϕk+1는 현재 정책 πk의 Q 함수에 대해 unbiased estimate입니다.
- 설명: On-policy 학습에서는 에이전트가 현재 학습 중인 정책 πk에 따라 데이터를 수집합니다. 따라서 수집된 데이터는 현재 정책에 대한 Q 함수의 unbiased estimate를 제공합니다. 반면, off-policy 학습에서는 다른 정책 π′로부터 데이터를 수집하므로, 학습 중인 정책과 일치하지 않아 bias가 생길 수 있습니다.
- 결론: On-policy는 항상 옳지만, off-policy는 다른 정책 π′로부터 데이터를 수집하므로 unbiased estimate가 아닐 수 있다.
State II:
- 설명: k→∞일 때, 충분히 많은 반복 후에 모든 상태-행동 쌍 (s,a)가 무한히 자주 방문됩니다. 이는 결국 모든 batch B에 대해 충분한 데이터를 수집할 수 있음을 의미합니다.
- 결론: 따라서 on-policy와 off-policy 모두에서 무한 반복 후에는 수렴이 보장됩니다. 즉, Qϕk는 최적 Q 함수 Q∗에 대해 unbiased estimate가 됩니다.
State III:
- 설명: 진술 II와 동일한 논리가 적용됩니다. 충분히 많은 반복 후, 모든 상태-행동 쌍이 충분히 자주 방문되므로 Qϕk는 최적 Q 함수 Q∗에 수렴합니다.
- 결론: 따라서 State II와 동일하게 on-policy와 off-policy 모두에서 무한 반복 후에는 수렴이 보장됩니다.
예시: N→∞일 때
Multi-step Q-learning에서 N이 무한대로 갈 때의 상황을 고려해봅시다:
yj,t=t′=t∑t+N−1γt′−trj,t′+γNa′maxQϕk(sj,t+N,a′)
여기서 γ는 할인 요인으로, 0<γ<1입니다. N→∞일 때, γN은 0에 수렴합니다:
γN→0asN→∞
따라서 bootstrapping 효과가 사라지게 됩니다. 이 경우 Multi-step Q-learning의 업데이트 식은 다음과 같이 단순화됩니다:
yj,t=t′=t∑t+∞γt′−trj,t′
이 식은 Monte Carlo 방법과 유사합니다. Monte Carlo 방법에서는 미래의 모든 보상을 고려하여 현재의 Q 값을 업데이트합니다. 따라서 N→∞일 때는 bootstrapping을 사용하지 않고, 실제로 수집된 보상들만을 기반으로 Q 값을 업데이트하게 됩니다.
- 결론: N→∞일 때는 모든 진술에 대해 성립되지 않습니다. 이는 Multi-step Q-learning이 더 이상 bootstrapping을 사용하지 않고, 순수한 Monte Carlo 방법으로 변환되기 때문입니다.
3. Variance of Q Estimate
N의 값이 갖는 의미
Q 값을 업데이트할 때, single step ((N = 1)) 대신 (N)개의 step 동안 누적된 보상을 사용하여 더 장기적인 정보를 반영하는 것입니다.
yj,t=t′=t∑t+N−1γt′−trj,t′+γNa′maxQϕk(sj,t+N,a′)
- 첫 번째 항은 현재부터 (N) step 동안의 누적 보상 (return)입니다.
- 두 번째 항은 (N) step 이후의 예측된 보상 (predicted return)입니다.
Bootstrapping and Variance
N이 클수록 더 장기적인 보상을 고려하지만, 부트스트래핑의 정도가 낮아집니다. 부트스트래핑이란 현재의 추정치를 미래의 예측에 반영하는 기법으로, 일반적으로 업데이트 과정에서 노이즈를 축적시킬 수 있습니다. 따라서, N=1일 때 부트스트래핑의 효과가 가장 강하게 작용하여 분산이 가장 높아집니다.
Variance를 단순히 "미래 가능성의 크기"라고 생각하면, N=1일 때 가장 크고, N→∞일 때 가장 작습니다.N→∞인 경우, 부트스트래핑 효과가 완전히 사라지며, 이는 Monte Carlo 방법과 유사합니다. 이 경우 실제로 수집된 보상만을 사용하게 되므로, 분산이 가장 낮아집니다.
결론
따라서, (N = 1)일 때 Q 추정치의 분산이 가장 크고, (N \rightarrow \infty)일 때 Q 추정치의 분산이 가장 작습니다.
4. Function Approximation
풀이
State 1: N=1일 때, Qϕk+1는 마지막 정책 Qπk의 Q 함수에 대한 unbiased estimate입니다.
N=1일 때는 1-step Q-learning이 됩니다. 즉, 부트스트래핑이 가장 강하게 적용되기 때문에 함수 근사는 bias를 가지게 됩니다. 함수 근사는 정확한 Q 함수 값을 나타내지 못하고 편향된 추정치를 제공합니다. 따라서 이 state는 일반적으로 옳지 않습니다.
State 2: N=1일 때 B→∞이고, k→∞인 경우, Qϕk는 Q∗에 수렴합니다.
데이터셋 크기 B와 반복 횟수 k가 무한대로 가면, 충분한 데이터와 학습 과정을 통해 함수 근사는 최적 Q 함수 Q∗에 수렴할 수 있습니다. 이는 함수 근사가 충분한 데이터를 사용하여 점차 정확한 Q 함수 값을 학습할 수 있음을 의미합니다. 따라서 이 state는 옳습니다.
State 3: N>1 (유한)일 때 B→∞이고, k→∞인 경우, Qϕk는 Q∗에 수렴합니다.
다중 스텝 (N-step) 방법도 마찬가지로, 충분한 데이터와 반복 횟수가 주어지면 함수 근사는 최적 Q 함수 Q∗에 수렴할 수 있습니다. 다중 스텝 방법은 더 많은 장기적인 보상을 고려하므로 수렴 속도가 더 빠를 수 있습니다. 따라서 이 state도 옳습니다.
State 4: N→∞일 때 B→∞이고, k→∞인 경우, Qϕk는 Q∗에 수렴합니다.
N이 무한대로 갈 때 Monte Carlo 방법과 유사하게 작동하며, 충분한 데이터와 반복 횟수가 주어지면 함수 근사는 최적 Q 함수 Q∗에 수렴할 수 있습니다. Monte Carlo 방법은 모든 보상을 직접 사용하는 방식이므로 편향이 없는 추정치를 제공합니다. 따라서 이 state도 옳습니다.
5. Multistep Importance Sampling
ϕk+1←argϕ∈Φminj,t∑(yj,t−Qϕ(sj,t,aj,t))2... (2)
Importance sampling ratio
Importance sampling ratio:
t′=t∏t+N−1π′(at′∣st′)π(at′∣st′)
이므로 target value는 다음과 같습니다.
yj,t=t′=t∑t+N−1⎝⎜⎛t^=t∏t′π′(at^∣st^)π(at^∣st^)⎠⎟⎞γt′−trj,t′+⎝⎜⎛t^=t∏t+N−1π′(at^∣st^)π(at^∣st^)⎠⎟⎞γNamaxQϕk(sj,t+N,aj,t+N)
N=1일 때
yj,t=π′(at∣st)π(at∣st)⋅rj,t+π′(at+1∣st+1)π(at+1∣st+1)⋅γamaxQϕk(sj,t+1,aj,t+1)
N→∞일 때
yj,t=t′=t∑∞⎝⎜⎛t^=t∏t′π′(at^∣st^)π(at^∣st^)⎠⎟⎞γt′−trj,t′
Importance sampling을 적용한 식 (2)
위의 yj,t를 식 (2)에 대입하면, 중요도 샘플링을 적용한 식은 다음과 같습니다:
ϕk+1←ϕ∈Φargminj,t∑⎝⎜⎛t′=t∑t+N−1⎝⎜⎛t^=t∏t′π′(at^∣st^)π(at^∣st^)⎠⎟⎞γt′−trj,t′+⎝⎜⎛t^=t∏t+N−1π′(at^∣st^)π(at^∣st^)⎠⎟⎞γNamaxQϕk(sj,t+N,aj,t+N)−Qϕ(sj,t,aj,t)⎠⎟⎞2
따라서, 중요도 샘플링을 적용한 식을 얻을 수 있습니다.
