JetPack 6.1이 너무 최신이여서 그런가.. 아직 리얼센스 SDK 공식 지원이 나오지 않았다.
ROS Humble을 쓰려면 6.1로 올려야 하는데 그럼 쓰지 말라는건지....??
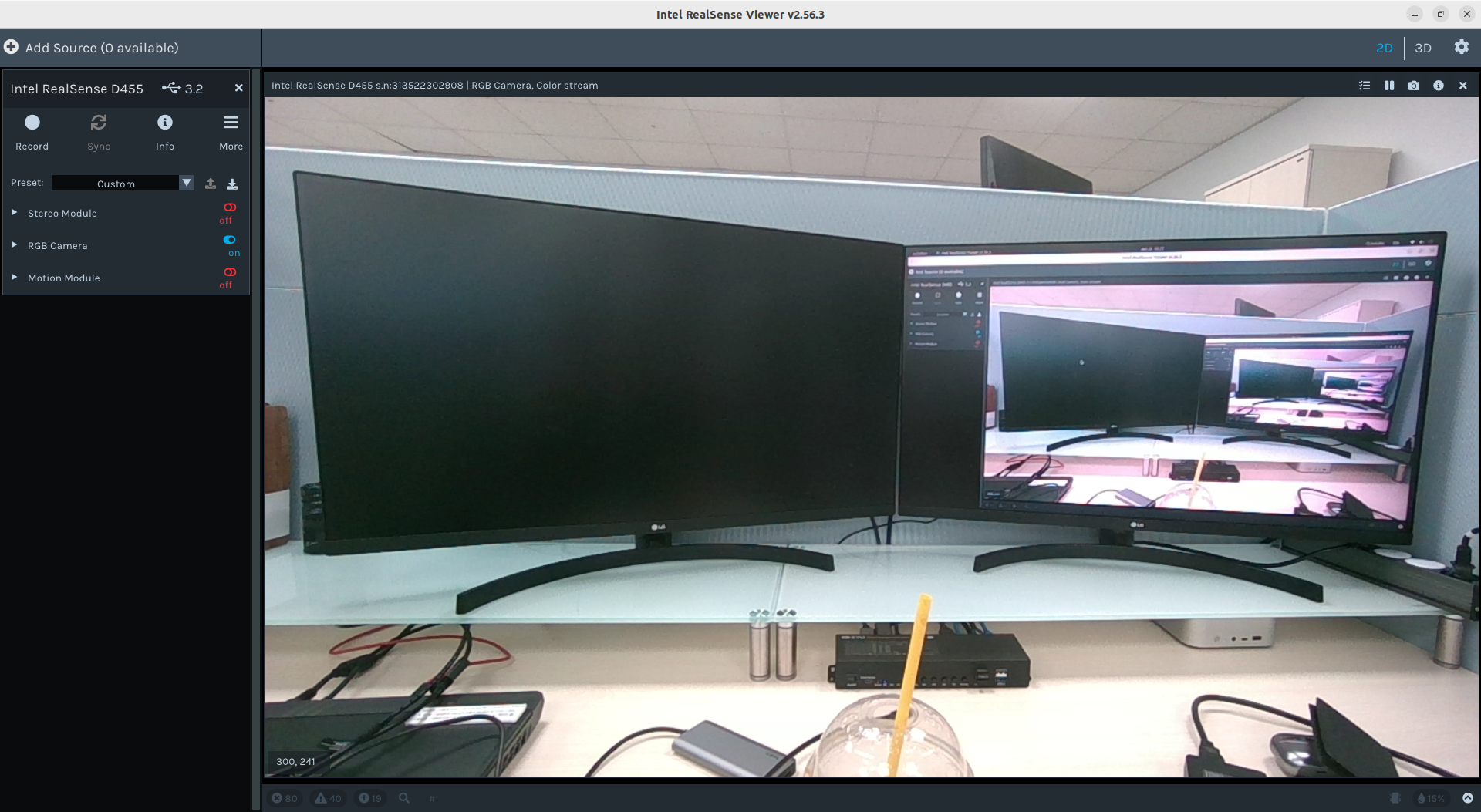
삽질 후 정상 동작을 확인했다.
1. SDK 설치
https://github.com/IntelRealSense/librealsense/blob/master/doc/installation_jetson.md
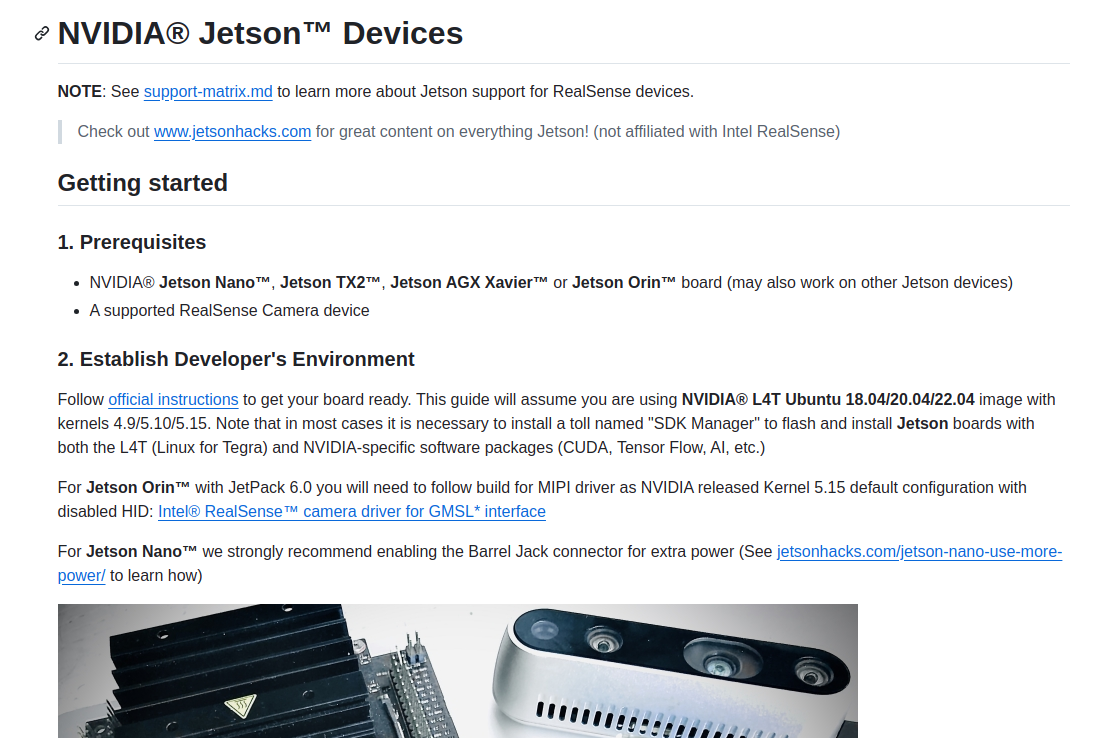
아마 대부분 Jetson에서 리얼센스 SDK 까려는 사람은 다 이 사이트를 가볼 것이다.
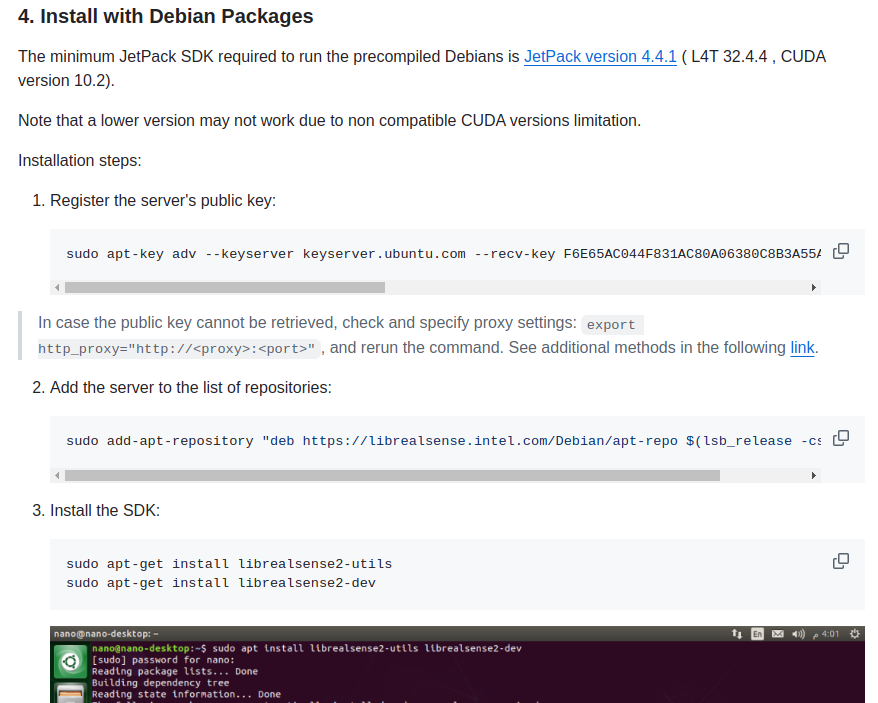
이제 이 부분에 많이들 속는데, apt로 손쉽게 깔 수 있는 것 같지만, JetPack 버전이 다르게 빌드해논 바이너리가 사용이 불가하다. 정확히는 설치는 되지만 구동이 안된다.
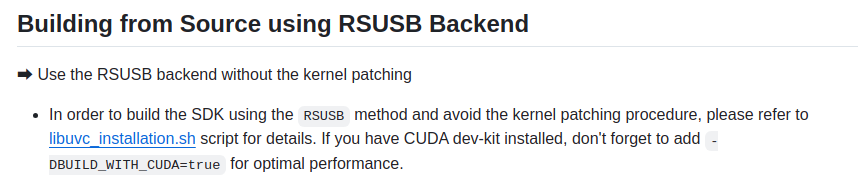
스클롤을 조금만 내려보면 대안을 제시해주는데 이제 이걸로 설치를 해야만한다.
1.1 libuvc_installation
https://github.com/IntelRealSense/librealsense/blob/master/doc/libuvc_installation.md
구체적인 설치법은 여기에 나와 있지만 이대로 따라하면 안된다. 왜냐하면 설명서에는 master 브런치로 설치하게 가이드 되지만 우리는 가장 최신인 https://github.com/IntelRealSense/librealsense/releases/tag/v2.56.3
버전을 설치해야 하기 때문이다.
$ wget https://github.com/IntelRealSense/librealsense/raw/master/scripts/libuvc_installation.sh
$ chmod +x ./libuvc_installation.sh이 부분 까지만 따라하고, libuvc_installation.sh를 수정해 주자.
echo Installing Librealsense-required dev packages
sudo apt-get install git cmake libssl-dev freeglut3-dev libusb-1.0-0-dev pkg-config libgtk-3-dev unzip -y
rm -f ./v2.56.3.zip # 수정
wget https://github.com/IntelRealSense/librealsense/archive/v2.56.3.zip # 수정
unzip ./v2.56.3.zip -d . # 수정
cd ./librealsense-2.56.3 # 수정
echo Install udev-rules
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo cp config/99-realsense-d4xx-mipi-dfu.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && sudo udevadm trigger
## 이 아래부분은 삭제 -> 수동으로 진행해야함
mkdir build && cd build
cmake ../ -DFORCE_LIBUVC=true -DCMAKE_BUILD_TYPE=release -DBUILD_WITH_CUDA=true # 수정
make -j2
sudo make install
echo -e "\e[92m\n\e[1mLibrealsense script completed.\n\e[0m"# 수정이 적힌 부분을 고쳐주자. 아래 부분을 삭제해 주자. 저부분은 수동으로만 처리해야한다.
맨 아래부분을 삭제 하고 이제 $ ./libuvc_installation.sh로 실행하자.
1.2. 살짝 수정
이제 그럼 ~/librealsense_build/librealsense-2.56.3폴더가 생길 것이다.
librealsense-2.56.3/CMake/external_libcurl.cmake에 해당 코드를 삽입하자.
CMAKE_ARGS -DCMAKE_CXX_FLAGS=${CMAKE_CXX_FLAGS}
-DCMAKE_C_FLAGS=${CMAKE_C_FLAGS}
-DCMAKE_BUILD_TYPE=${CMAKE_BUILD_TYPE}
-DCMAKE_C_FLAGS_DEBUG=${CMAKE_C_FLAGS_DEBUG}
-DCMAKE_C_FLAGS_MINSIZEREL=${CMAKE_C_FLAGS_MINSIZEREL}
-DCMAKE_C_FLAGS_RELEASE=${CMAKE_C_FLAGS_RELEASE}
-DCMAKE_C_FLAGS_RELWITHDEBINFO=${CMAKE_C_FLAGS_RELWITHDEBINFO}
-DCMAKE_CXX_STANDARD_LIBRARIES=${CMAKE_CXX_STANDARD_LIBRARIES}
-DCMAKE_INSTALL_PREFIX=${CMAKE_CURRENT_BINARY_DIR}/libcurl/libcurl_install
-DCMAKE_INSTALL_LIBDIR=lib
-DCMAKE_TOOLCHAIN_FILE=${CMAKE_TOOLCHAIN_FILE}
-DANDROID_ABI=${ANDROID_ABI}
-DANDROID_STL=${ANDROID_STL} ${CURL_FLAGS}
-DBUILD_LIBCURL_DOCS=OFF # 이 부분!!!!!!!!저거 안넣어주면 libcurl 빌드 시 오류가 발생해 빌드가 안된다.
자 거의 다왔다. ~/librealsense_build/librealsense-2.56.3 위치에서
cmake -B build -DFORCE_LIBUVC=true -DCMAKE_BUILD_TYPE=Release -DBUILD_WITH_CUDA=true
cmake --build -j12
sudo cmake --install build하면 설치가 종료된다.
2. realsense-ros
자 이제 ros2 패키지를 깔아보자
https://github.com/IntelRealSense/realsense-ros?tab=readme-ov-file

당연하게도 우리는 deb를 통해 설치를 안했으므로 옵션 2로 깔아줘야 한다. 그대로 따라하자
된다.

안녕하세요 저는 jetpack6.2 orin nano 보드를 사용중인데 위의 내용 덕분에 sdk 문제를 해결했습니다. 그런데 ros2 패키지 과정에서 다른 과정들은 다 괜찮았는데 colcon build를 하니 에러가 나면서 빌드가 제대로 되지 않더라구요. 혹시 아무 이상없이 colcon build가 잘 되셨을까요? "unique_identifier_msgs/detail/uuid_struct.h"의 빨간줄이 그이면서 에러가 나는데 혹시 아시는 내용 있으시면 답변 주심 감사하겠습니다.