ROS Node 디버깅
1. 빌드 모드 변경하기
catkin build or catkin_make시 아래의 cmake option을 추가해 빌드한다.
-DCMAKE_BUILD_TYPE=RelWithDebInfo
2. launch.json 파일 수정하기
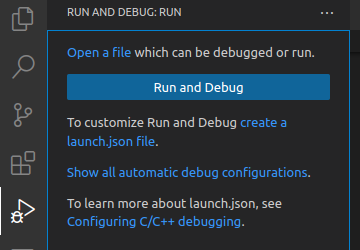
1. Create a launch.Json 선택
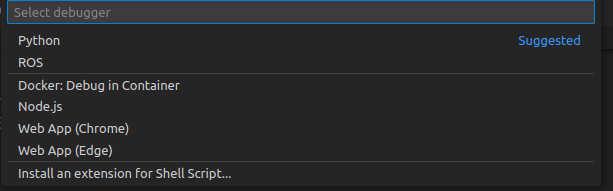
2. ROS 선택

3. ROS: Launch 선택
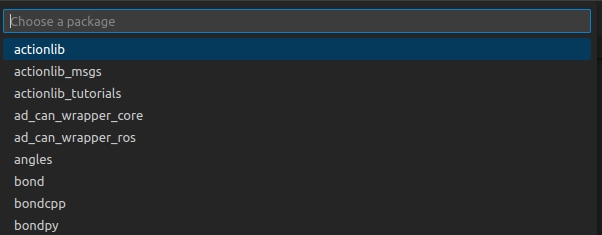
4. 디버깅 하고자 하는 패키지 선택

5. 패키지 내 런치 파일 선택
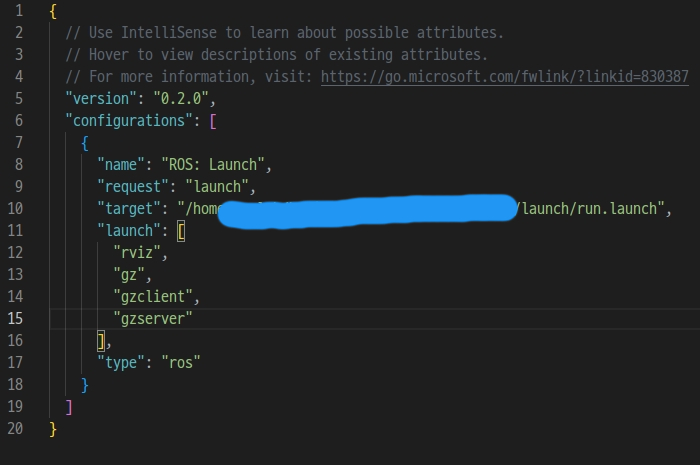
6. launch.json 파일 생성 확인
3. 중단점 설정
4. 디버깅 실행
초록색 버튼 실행

Jacob