09. HAL 입문기 3. SPI 통신 구현 실습 (feat. 어이없는 실패로 얻은 교훈)
실습 목표
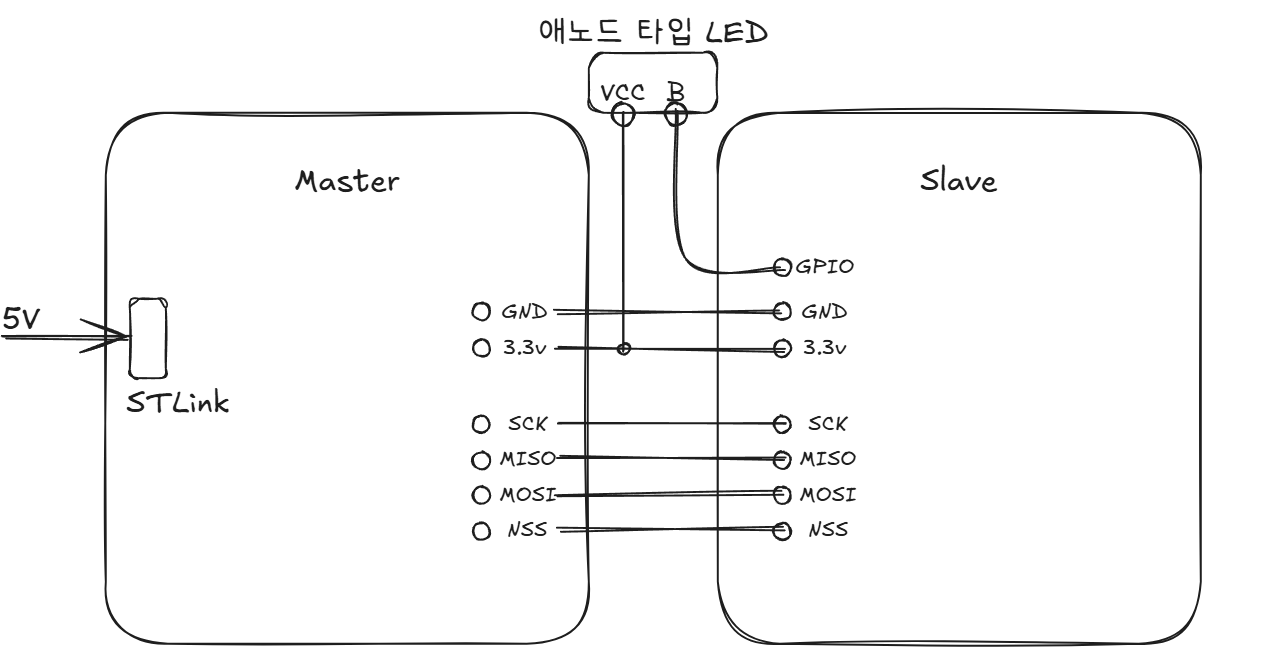
- STM32 nucleo F103RB (Master)
- STM32 F103C8T6 (Slave)
두 MCU 간의 SPI 통신을 구현하고, Slave 정상 수신 확인은 LED 점등으로,
Master 의 디버깅은 Putty 를 통해 확인해보는 실습에 도전한다.
선 연결
이전에 실습한 I2C 연결의 잔재가 남아있다...
내가 봐도 보기가 어려운 관계로 그림으로 대체한다.
CubeIDE , MX 설정
Master
-
Connectivity -> SPI2 : Full-Duplex Master , DMA Setting TX,RX 추가
-
DMA : 기존 Polling 방식은 CPU 사용량이 많아지기 때문에 , Direct Memory Access 방식을 통해, 직접 메모리 수준에서 데이터 송수신이 일어난다.
-
Code , txData -> 0xAB 를 송신, 송수신이 동시에 일어난 후, 콜백에서 수신 데이터 PC로 UART송신 -> 통신종료 -> 무한반복
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
SPI_HandleTypeDef hspi2;
DMA_HandleTypeDef hdma_spi2_tx;
DMA_HandleTypeDef hdma_spi2_rx;
UART_HandleTypeDef huart2;
/* USER CODE BEGIN PV */
uint8_t txData = 0xAB;
uint8_t rxData = 0;
volatile uint8_t spiDone = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_USART2_UART_Init(void);
static void MX_SPI2_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART2_UART_Init();
MX_SPI2_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
spiDone = 0;
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive_DMA(&hspi2, &txData, &rxData, 1);
while(!spiDone);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief SPI2 Initialization Function
* @param None
* @retval None
*/
static void MX_SPI2_Init(void)
{
/* USER CODE BEGIN SPI2_Init 0 */
/* USER CODE END SPI2_Init 0 */
/* USER CODE BEGIN SPI2_Init 1 */
/* USER CODE END SPI2_Init 1 */
/* SPI2 parameter configuration*/
hspi2.Instance = SPI2;
hspi2.Init.Mode = SPI_MODE_MASTER;
hspi2.Init.Direction = SPI_DIRECTION_2LINES;
hspi2.Init.DataSize = SPI_DATASIZE_8BIT;
hspi2.Init.CLKPolarity = SPI_POLARITY_LOW;
hspi2.Init.CLKPhase = SPI_PHASE_1EDGE;
hspi2.Init.NSS = SPI_NSS_SOFT;
hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_2;
hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB;
hspi2.Init.TIMode = SPI_TIMODE_DISABLE;
hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
hspi2.Init.CRCPolynomial = 10;
if (HAL_SPI_Init(&hspi2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN SPI2_Init 2 */
/* USER CODE END SPI2_Init 2 */
}
/**
* @brief USART2 Initialization Function
* @param None
* @retval None
*/
static void MX_USART2_UART_Init(void)
{
/* USER CODE BEGIN USART2_Init 0 */
/* USER CODE END USART2_Init 0 */
/* USER CODE BEGIN USART2_Init 1 */
/* USER CODE END USART2_Init 1 */
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART2_Init 2 */
/* USER CODE END USART2_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Channel4_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel4_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel4_IRQn);
/* DMA1_Channel5_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Channel5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel5_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET);
/*Configure GPIO pin : B1_Pin */
GPIO_InitStruct.Pin = B1_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(B1_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pin : PB0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI15_10_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(EXTI15_10_IRQn);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
void HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)
{
if(hspi->Instance == SPI2)
{
spiDone = 1;
// UART로 보낼 문자열을 저장할 버퍼
char uart_buf[20];
int len = sprintf(uart_buf, "Received: 0x%02X\r\n", rxData);
// UART로 변환된 문자열 전송
HAL_UART_Transmit(&huart2, (uint8_t*)uart_buf, len, 100);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
Slave
-
블루필 보드 사용, .ioc : SPI1 선택 Full-Duplex Slave, DMA 생성, 슬레이브는 Polling 으로 동작하기에 인터럽트 OFF
-
Code , 동기 방식으로 송수신 대기, 마스터의 데이터를 정상적으로 받아졌다면 , LED핀을 토글하여 표시한다.
while (1)
{
if (HAL_SPI_TransmitReceive(&hspi1,&txData,&rxData,1,HAL_MAX_DELAY) == HAL_OK)
{
if (rxData == 0xAB)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_13);
HAL_Delay(100);
}
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}비상상황
Slave 보드의 문제로인해 STLink 플래시가 정상적으로 이루어지지 않는 현상 발생.
CubeProgrammer 프로그램을 다운받아 면밀히 디버깅 해보았으나, 인식을 하지 못함.
Boot0 핀을 GND에 물려보기도 하고 했지만, 먹통..
이유는 보드에 핀이 납땜 되지 않은 상태로 도착했는데, 전자기기기능사 보유자의 자신감으로 직접 납땜을하다가, 어딘가 손상을 일으킨거 같다. (요즘 거북목 덕분인지, 등쪽 통증이 심한데 부상투혼의 여파인듯 하다.)
- 납땜 하기전 테스트 플래시 상황에선 잘 되었다.
- 먼저 코드를 올려놓고 납땜을 할걸 .. 이라는 후회도 든다.
- 결론은 납땜을 더 잘하자.
결국 테스트를 하지 못하고,,
마스터 보드에서 MISO -> MOSI 를 직결하고 SPI 데이터를 전송해보는 경험만 해보고 이번 실습을 끝내기로 했다.
마치며
비록 실패했지만, 대안을 찾아내고, 이유까지 파악했다.
추후에는 다른 실수를 하지 않을 값진 경험을 했다고 생각한다.
