프로그램 vs 프로세스 vs 스레드
- 프로그램
- 실행 가능한 코드, 실행되기를 기다리는 명령어와 정적인 데이터의 묶음.
- 프로세스
- 실행 중인 프로그램
- 최소 한개의 스레드를 무조건 가지고 있다.
- 플프로그램 이미지, 메모리 인스턴스, 커널 리소스 등의 정보
- 스레드
- 프로세스 내의 실행 단위를 의미.
- 가상화 된 프로세서, 스택, 레지스터, 명령어 포인터 등 프로세서의 상태를 포함한다.
- 프로세스 내의 모든 스레드는 같은 주소 공간을 공유한다.
프로세스 내의 메모리 공간 구조.
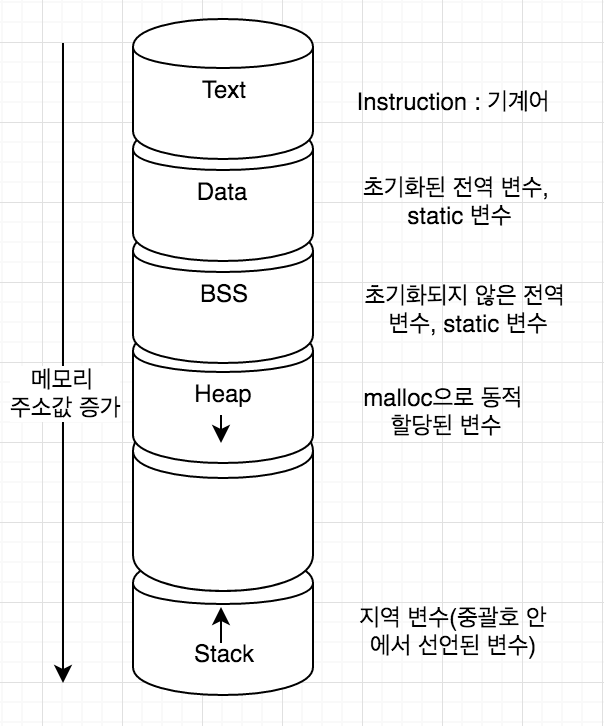
- 힙 영역과 스텍 영역 사이의 빈 공간이 있는 이유는 malloc 과 같이 코드 상에서 동적으로 할당하기 위해서 비워진 메모리이다.
- 참고 URL: https://bowbowbow.tistory.com/16
Multi-process
- 부모 프로세스와 자식 프로세스
- 하나의 프로세스가 다른 프로세스를 생성할때, 생성한 프로세스를 부모 프로세스, 생성된 프로세스를 자식 프로세스라고 한다.
- 부모 프로세스는 자식 프로세스가 자식 프로세스에 대해서 종료 처리를 해주어야 한다. (좀비 프로세스 생성 방지를 위해)
사용 헤더
- sys/types.h
- sys/wait.h
- unistd.h
사용 함수
- fork(): 자식 프로세스를 만드는 함수
pid_t fork(void) 파라미터 * 없음 반환값 * 성공: 부모 프로세스 -> 자식 프로세스의 PID값, 자식 프로세스 -> 0 * 실패: 부모 프로세스 -> -1, 자식 프로세스 -> 생성되지 않음. -> fork의 경우 자식 프로세스를 생성할 떄 모든 데이터를 복제하여 생성한다. - getpid, getppid: PID 값 얻는 함수
pid_t getpid(void); pid_t getppid(void); 파라미터 * 없음 반환값 * getpid: 현재 프로세스의 PID * getppid: 현재 프로세스의 부모 프로세스 PID - exec: 실행 함수
-
exec 함수의 경우 fork에서 생성된 데이터를 지우고 실행한 명령어의 새로운 데이터로 구성한다.
int execl(const char *path, const char *arg, .../* (char *) NULL */); int execlp(const char *file, const char *arg, ... /* (char *) NULL */); int execle(const char *path, const char *arg, ... /*, (char *) NULL, char * const envp[] */); int execv(const char *path, char *const argv[]); int execvp(const char *file, char *const argv[]); int execvpe(const char *file, char *const argv[], char *const envp[]);
- execl: list base arguments
- 마지막에 NULL 값 필수 입력.
- ececv: vector based arguments
- suffix 'p': $PATH에서 경로 찾음
- suffix 'e': 새로운 환경 변수 설정
반환값
* 실패: -1
-
- exit: 종료 함수
void exit(int status); 파라미터 * status: exit status * 성공: 0 * 실패: None Zero - wait(): 자식 프로세스 종료 대기 함수
pid_t wait(int *wstatus); 파라미터 - wstatus: child process의 종료 상태 반환값 - 성공시 : terminated 된 자식 프로세스의 pid - 실패시 : -1 ====================================== 사용 가능 메크로 WIFEXITED(wstatus) : 0이 아닌 값을 리턴하면 자식프로세스가 정상종료했다는 의미. WEXITSTATUS(wstatus) : 정상 종료했음을 확인하면 해당 메크로를 통해여 종료 코드를 확인할 수 있다. WIFSIGNALED(wstatus) : 이 매크로가 참이면 Signal을 통해 프로세스가 비정상 종료 했다는 뜻 WTERMSIG(wstatus) : SIFSIGNALED(status)매크로가 참일 경우 자식 프로세스를 종료시킨 시그널 번호를 얻는 매크로 WCOREDUMP(wstatus) : 시스템에 따라서는 WIFSIGNALED(status)가 참일 경우 자식 프로세스가 core덤프 파일을 생성했는지를 확인하는 이 매크로를 제공 WIFSTOPPED(wstatus) : 이 매크로가 참이면 자식 프로세스는 현재 멈춰있는(stopped) 상태이다. WSTOPSIG(wstatus) : WIFSTOPPED(status)매크로가 참일 경우 자식 프로세스를 멈춤상태로 만든 시그널번호를 얻는다. - waitpid(): PID 기준으로 프로세스 종료 대기 함수
pid_t waitpid(pid_t pid, int *status, int options); 파라미터 - pid: 종료 대기할 프로세스의 pid - status: 자식 프로세스의 종료 코드 - options - WNOHANG. : waitpid를 실행했을 떄, 자식 프로세스가 종료되어 있지 않으면, 블록상태가 되지 않고 바로 리턴하게 해준다. - WUNTRACED : pid에 해당하는 자식 프로세스가 멈춤 상태일 경우 그 상태를 리턴한다. - WCONTINUED : 중단 되었다가 재개된 자식 프로세스의 상태를 받는다. 반환값 - 양수: 상태가 바뀐 child process의 pid - 0: WNOHANG 지정시 - -1:실패 - wait4(): 자식 프로세스가 종료되는 것을 기다리며, 종료된 프로세스의 상태와 자원 사용량을 알려주는 함수
pid_t wait4(pid_t pid, int *status, int options, struct rusage *rusage); 파라미터 - pid: 종료 대기할 프로세스의 pid - status: 자식 프로세스의 종료 코드 - options - WNOHANG. : 자식 프로세스가 종료되어 있지 않으면, 블록상태가 되지 않고 바로 리턴하게 해준다. - WUNTRACED : pid에 해당하는 자식 프로세스가 멈춤 상태일 경우 그 상태를 리턴한다. - WCONTINUED : 중단 되었다가 재개된 자식 프로세스의 상태를 받는다. - rusage: 리소스 사용량 반환값 - 양수: 상태가 바뀐 child process의 pid - 0: WNOHANG 지정시 - -1:실패- struct rusage 구조체
struct rusage { struct timeval ru_utime; /* user CPU time used */ struct timeval ru_stime; /* system CPU time used */ long ru_maxrss; /* maximum resident set size */ long ru_ixrss; /* integral shared memory size */ long ru_idrss; /* integral unshared data size */ long ru_isrss; /* integral unshared stack size */ long ru_minflt; /* page reclaims (soft page faults) */ long ru_majflt; /* page faults (hard page faults) */ long ru_nswap; /* swaps */ long ru_inblock; /* block input operations */ long ru_oublock; /* block output operations */ long ru_msgsnd; /* IPC messages sent */ long ru_msgrcv; /* IPC messages received */ long ru_nsignals; /* signals received */ long ru_nvcsw; /* voluntary context switches */ long ru_nivcsw; /* involuntary context switches */ }; struct timeval { long tv_sec; long tv_usec; }
- struct rusage 구조체
예제 코드
#include<stdio.h>
#include<stdlib.h>
#include<string.h>
#include<unistd.h>
#include<errno.h>
#include<sys/types.h>
#include<sys/time.h>
#include<sys/wait.h>
#include<sys/resource.h>
#define TEST_PATH "./"
#define AUTHER "Yoon Yeoung Jin "
#define USE_WAIT 0
#define USE_WAIT4 1
void yj_print_pid(void)
{
pid_t pid;
pid = getpid();
printf(" * current process pid : %d\n", pid);
}
void yj_print_ppid(void)
{
pid_t pid;
pid = getppid();
printf(" * parent process pid : %d\n", pid);
}
void yj_print_ruseage(const char *leader, const struct rusage *ru)
{
const char *ldr = (leader == NULL) ? "" : leader;
printf("%sCPU time (secs): user=%.3f; system=%.3f\n", ldr,
ru->ru_utime.tv_sec + ru->ru_utime.tv_usec / 1000000.0,
ru->ru_stime.tv_sec + ru->ru_stime.tv_usec / 1000000.0);
printf("%sMax resident set size: %ld\n", ldr, ru->ru_maxrss);
printf("%sIntegral shared memory: %ld\n", ldr, ru->ru_ixrss);
printf("%sIntegral unshared data: %ld\n", ldr, ru->ru_idrss);
printf("%sIntegral unshared stack: %ld\n", ldr, ru->ru_isrss);
printf("%sPage reclaims: %ld\n", ldr, ru->ru_minflt);
printf("%sPage faults: %ld\n", ldr, ru->ru_majflt);
printf("%sSwaps: %ld\n", ldr, ru->ru_nswap);
printf("%sBlock I/Os: input=%ld; output=%ld\n",
ldr, ru->ru_inblock, ru->ru_oublock);
printf("%sSignals received: %ld\n", ldr, ru->ru_nsignals);
printf("%sIPC messages: sent=%ld; received=%ld\n",
ldr, ru->ru_msgsnd, ru->ru_msgrcv);
printf("%sContext switches: voluntary=%ld; "
"involuntary=%ld\n", ldr, ru->ru_nvcsw, ru->ru_nivcsw);
}
int main(int argc, char **argv)
{
int wstatus = 0;
pid_t child_pid = 0;
pid_t current_pid = 0;
struct rusage usage;
current_pid = fork();
if(current_pid == -1){
printf("fork() fail : %s\n", strerror(errno));
return -1;
} else if(current_pid > 0){
/* parent process */
printf(" [*] THIS IS PARENT PROCESS\n");
yj_print_pid();
} else {
/* child process */
printf(" [*] THIS IS CHILD PROCESS\n");
yj_print_pid();
yj_print_ppid();
sleep(1);
if(execl("/bin/ls", "ls", "-al", TEST_PATH, NULL) == -1){
printf("execl() fail : %s\n", strerror(errno));
exit(-1);
}
}
#if USE_WAIT
child_pid = wait(&wstatus);
if(child_pid == -1){
printf("wait() fail: %s\n", strerror(errno));
return -1;
}
if(WIFEXITED(wstatus)){
printf(" * The child process(%d) terminated successfully. (CODE: %d)\n ", child_pid, WEXITSTATUS(wstatus));
} else {
printf(" * The child process(%d) is not exited\n ", child_pid);
}
#elif USE_WAIT4
child_pid = wait4(current_pid, &wstatus, 0, &usage);
if(child_pid == -1){
printf("wait4() fail: %s\n", strerror(errno));
return -1;
}
if(WIFEXITED(wstatus)){
printf(" * The child process(%d) terminated successfully. (CODE: %d)\n ", child_pid, WEXITSTATUS(wstatus));
yj_print_ruseage(AUTHER, (const struct rusage *)&usage);
} else {
printf(" * The child process(%d) is not exited\n ", child_pid);
}
#endif
return 0;
}
신기한건 다 해보는 사람