DAG Pattern_visualization

class pattern
pip install cdpi -qfrom cdpi import patternfrom collections import deque
from itertools import combinations, chain
from collections import defaultdict
import numpy as npVisualization methods
The following two steps are required for 'pretty' graph visualization.
- Assign the 'pretty' position to each vertex considering the edge and link.
- Draw vertex, edge, and link according to the position.
For step 1, I used Force-Directed Algorithm.
force_directed_algorithm
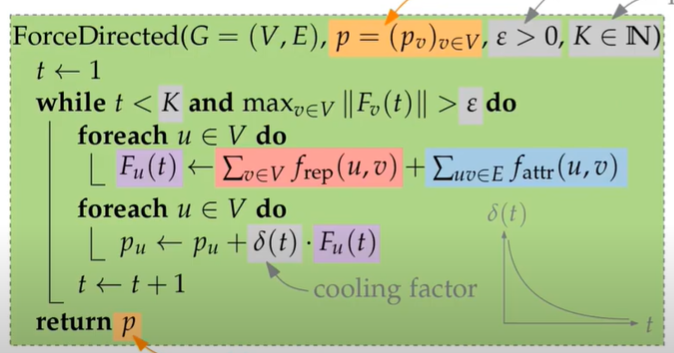
def force_directed_algorithm(self, pos, iterations:int = 100, ideal_length = 1):
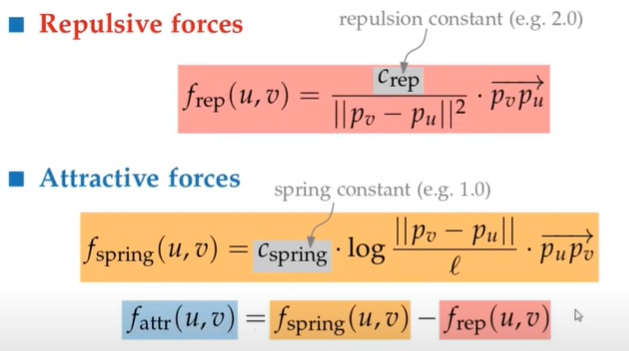
c_rep = 2
c_spr = 1
t = 1
for i in range(iterations):
# Calculate repulsion force
repulsion = {vertex: np.zeros(2) for vertex in self.vertex}
for u, v in combinations(self.vertex, 2):
delta = pos[u] - pos[v]
dist = np.sqrt(delta.dot(delta))
if dist > 0:
rep = delta * c_rep / dist**3
repulsion[u] += rep
repulsion[v] -= rep
# Calculate attraction force
attraction = {vertex: np.zeros(2) for vertex in self.vertex}
for u in self.vertex:
for v in list(self.child[u].keys()) + list(self.link[u].keys()):
delta = pos[u] - pos[v]
dist = np.sqrt(delta.dot(delta))
if dist > 0:
attr = c_spr * delta * np.log(dist/ideal_length)/dist - delta * c_rep / dist**3
attraction[u] -= attr
attraction[v] += attr
# Calculate total force
force = {vertex: attraction[vertex] + repulsion[vertex] for vertex in self.vertex}
# Update vertex pos
for vertex in self.vertex:
delta = force[vertex]
dist = np.sqrt(delta.dot(delta))
pos[vertex] += delta * min(dist, t) / dist
t *= (1 - i / iterations)
return pos
pattern.force_directed_algorithm = force_directed_algorithmdraw_by_pos
Parameter
- pos : Dictionary where the positions of vertices are stored. The key of pos is vertices (str) and the item is coordinates of vertices (np.array)
import matplotlib.pyplot as plt
def draw_by_pos(self, pos:dict):
fig, ax = plt.subplots()
# Draw Edges
for pa in self.child.keys():
for ch in self.child[pa].keys():
x, y = pos[pa]
dx, dy = (pos[ch] - pos[pa])/10 * 8
plt.arrow(x, y, dx, dy, length_includes_head = True, width = 0.1, color = 'black')
# Draw Links
pairs = combinations(list(self.link.keys()), 2)
for v1 in self.link.keys():
for v2 in self.link[v1].keys():
x, y = pos[v1]
dx, dy = pos[v2] - pos[v1]
plt.arrow(x, y, dx, dy, width = 0.1, color = 'black')
# Draw Vertex and its name
for v, p in pos.items():
ax.add_patch(plt.Circle(p, 0.5, color = 'lightsteelblue'))
if len(v) == 1:plt.text(p[0], p[1], v, fontsize = 16, ha='center', va='center')
else : plt.text(p[0], p[1], v, fontsize = 12, ha='center', va='center')
self.pos = pos
pattern.draw_by_pos = draw_by_posdraw
def draw(self):
# Initial position setting
max_int = int(np.sqrt(2 * len(self.vertex))) + 1
loc = list(combinations(list(range(max_int + 1)), 2))
vertices = list(self.vertex)
pos = dict()
for i, v in enumerate(vertices):
pos[v] = np.array(loc[i]).astype('float64')
# Find pos
pos = self.force_directed_algorithm(pos)
# Draw graph by pos
self.draw_by_pos(pos)
pattern.draw = drawExample
ptn = pattern()
ptn.add_edges([
('A', 'D'),
('A', 'C'),
('D', 'B'),
('B', 'E'),
('C', 'E'),
('C', 'F'),
('D', 'H'),
('E', 'I'),
('F', 'J'),
('H', 'K'),
('I', 'L'),
('J', 'L'),
('G', 'J'),
('K', 'M')
])
ptn.draw()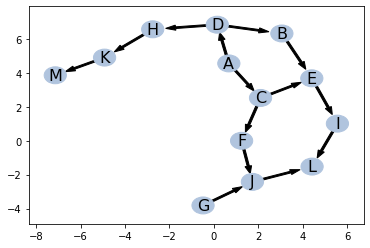
ptn = pattern()
ptn.add_edges([
('A', 'C'),
('C', 'B'),
('B', 'D'),
])
ptn.add_links([
('D', 'TEST'),
('D', 'F'),
('TEST', 'F'),
])
ptn.draw()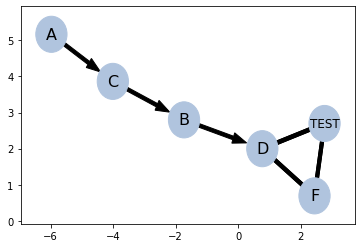

move out to : https://lobster-tech.com?utm_source=velog