고양이 수염 스티커 만들기
라이브러리불러오기
import cv2
import matplotlib.pyplot as plt
import numpy as np
import dlibmy_image_path = './camera_sticker/images/image.png'
img_bgr = cv2.imread(my_image_path) # OpenCV로 이미지를 불러옵니다
img_show = img_bgr.copy() # 출력용 이미지를 따로 보관합니다
plt.imshow(img_bgr) # 이미지 출력하기
plt.show() 
아- 파래파래
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
plt.imshow(img_rgb)
plt.show()
# detector를 선언합니다
detector_hog = dlib.get_frontal_face_detector()img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
dlib_rects = detector_hog(img_rgb, 1) # (image, num of image pyramid)print(dlib_rects)
for dlib_rect in dlib_rects:
l = dlib_rect.left()
t = dlib_rect.top()
r = dlib_rect.right()
b = dlib_rect.bottom()
cv2.rectangle(img_show, (l,t), (r,b), (0,255,0), 2, lineType=cv2.LINE_AA)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()rectangles[[(141, 201) (409, 468)]]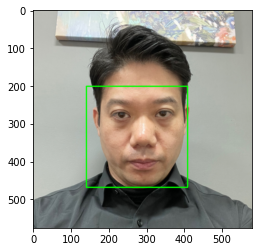
# 랜드마크 모델 불러오기
model_path = './camera_sticker/models/shape_predictor_68_face_landmarks.dat'
landmark_predictor = dlib.shape_predictor(model_path)내 얼굴이 삐뚤어졌나..
list_landmarks = []
# 얼굴 영역 박스 마다 face landmark를 찾아냅니다
for dlib_rect in dlib_rects:
points = landmark_predictor(img_rgb, dlib_rect)
# face landmark 좌표를 저장해둡니다
list_points = list(map(lambda p: (p.x, p.y), points.parts()))
list_landmarks.append(list_points)
print(len(list_landmarks[0]))68# landmark 점 찍기
for landmark in list_landmarks:
for point in landmark:
cv2.circle(img_show, point, 2, (0, 255, 255), -1)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()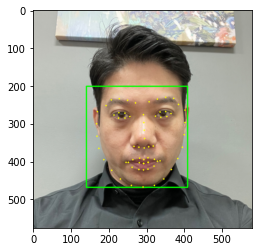
for dlib_rect, landmark in zip(dlib_rects, list_landmarks):
print (landmark[30]) # 코의 index는 30 입니다
x = landmark[30][0]
y = landmark[30][1]
w = h = dlib_rect.width()
print("(x, y) : ({}, {})".format(x, y))
print("(w, h) : ({}, {})".format(w, h))(295, 339)
(x, y) : (295, 339)
(w, h) : (269, 269)# 스티커 이미지를 불러옵니다
sticker_path = './camera_sticker/images/cat-whiskers.png'
img_sticker = cv2.imread(sticker_path) # 이미지 Resize
img_sticker = cv2.resize(img_sticker, (w, h))
print (img_sticker.shape)(269, 269, 3)# RGB 이미지로 바꾸기
img_sticker_rgb = cv2.cvtColor(img_sticker, cv2.COLOR_BGR2RGB)
plt.imshow(img_sticker_rgb)
print (img_sticker_rgb.shape)(269, 269, 3)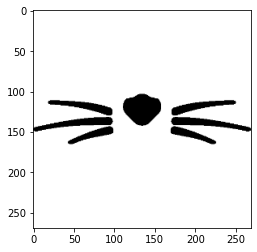
# 스티커 이미지 시작 좌표 (위좌)
refined_x = x - w // 2 # left
refined_y = y - h // 2 # top
print("(x, y) : ({}, {})".format(refined_x, refined_y))(x, y) : (161, 205)# 스티커가 원본 이미지의 범위를 벗어날때
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('(x, y): (%d, %d)' %(refined_x, refined_y))(x, y): (161, 205)# img_show[from: to] 형식
# 원본 이미지에서 스티커 적용할 위치 crop한 이미지
sticker_area = img_show[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]]
img_show[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]] = \
np.where(img_sticker==0, img_sticker, sticker_area).astype(np.uint8)
plt.imshow(cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB))
plt.show() 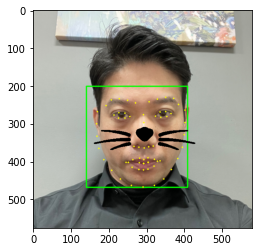
오 잘 붙었어
# 깔끔하게 정리
# img_show 대신 img_rbg 이용해보기
sticker_area = img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]]
img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]] = \
np.where(img_sticker==0, img_sticker, sticker_area).astype(np.uint8)
plt.imshow(cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB))
plt.show()
여러가지 테스트
## 각도 바꿔보기
my_image_path = './camera_sticker/images/image2.png'
img_bgr = cv2.imread(my_image_path) # OpenCV로 이미지 불러오기
img_show = img_bgr.copy() # 출력 이미지 따로 보관
# RGB 변형
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
plt.imshow(img_rgb)
plt.show()
왜 화났지?
# detector 선언
detector_hog = dlib.get_frontal_face_detector()
# detector_hog를 이용해 얼굴의 bounding box 추출
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
dlib_rects = detector_hog(img_rgb, 1) # (image, # of image pyramid)
# 찾은 얼굴 영역 박스 리스트
print(dlib_rects)
for dlib_rect in dlib_rects:
l = dlib_rect.left() # 왼쪽 아래
t = dlib_rect.top() # 왼쪽 위
r = dlib_rect.right() # 오른쪽 위
b = dlib_rect.bottom() # 오른쪽 아래
cv2.rectangle(img_show, (l, t), (r, b), (0, 255, 0), 2, lineType=cv2.LINE_AA)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()rectangles[[(134, 206) (455, 527)]]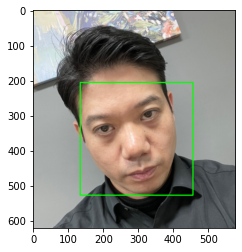
오 되네????
# 저장한 landmark 모델 불러오기
landmark_predictor = dlib.shape_predictor(model_path)
list_landmarks = []
# 얼굴 영역 박스마다 face landmark를 찾아내기
for dlib_rect in dlib_rects:
points = landmark_predictor(img_rgb, dlib_rect) # (RGB, rectangle)
# face landmark 좌표 저장하기
list_points = list(map(lambda p: (p.x, p.y), points.parts()))
list_landmarks.append(list_points)
print(len(list_landmarks[0]))
# landmark 점 찍기
for landmark in list_landmarks:
for point in landmark:
cv2.circle(img_show, point, 2, (0, 255, 255), -1)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()68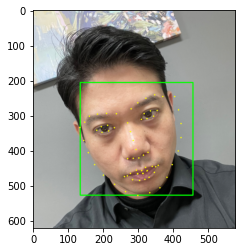
# 좌표 확인하기
for dlib_rect, landmark in zip(dlib_rects, list_landmarks):
print(landmark[33]) # 코 끝의 index = 33
x = landmark[33][0]
y = landmark[33][1]
w = h = dlib_rect.width()
print('코의 위치 (x, y) : (%d, %d)' %(x, y))
print('box 크기 (w, h) : (%d, %d)' %(w, h))
# 스티커 이미지 시작 좌표 (top-left 좌표)
refined_x = x - w//2 # left
refined_y = y - h//2 # top
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('스티커 좌표 (x, y): (%d, %d)' %(refined_x, refined_y))(301, 421)
코의 위치 (x, y) : (301, 421)
box 크기 (w, h) : (322, 322)
스티커 좌표 (x, y): (140, 260)img_sticker = cv2.imread(sticker_path) # 스티커 이미지 불러오기
img_sticker = cv2.resize(img_sticker, (w, h)) # 스티커 resize
print(img_sticker.shape)(322, 322, 3)# (코의) x, y 좌표 조정 (top-left 좌표)
# 스티커 이미지 시작 좌표
refined_x = x - w//2# left
refined_y = y - h//2 # top
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('(x, y): (%d, %d)' %(refined_x, refined_y))(x, y): (140, 260)# img_show 대신 img_rbg 이용해보기
sticker_area = img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]]
img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]] = \
np.where(img_sticker==0, img_sticker, sticker_area).astype(np.uint8)
plt.imshow(cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB))
plt.show()
붙기는 붙네...
마스크 쓰기
my_image_path = './camera_sticker/images/image1.png'
img_bgr = cv2.imread(my_image_path) # OpenCV로 이미지 불러오기
img_show = img_bgr.copy() # 출력 이미지 따로 보관
# RGB 이미지로 변형
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
plt.imshow(img_rgb)
plt.show()
# detector 선언
detector_hog = dlib.get_frontal_face_detector()
# detector_hog를 이용해 얼굴의 bounding box 추출
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
dlib_rects = detector_hog(img_rgb, 1) # (image, # of image pyramid)
# 찾은 얼굴 영역 박스 리스트
print(dlib_rects)
for dlib_rect in dlib_rects:
l = dlib_rect.left() # 왼쪽 아래
t = dlib_rect.top() # 왼쪽 위
r = dlib_rect.right() # 오른쪽 위
b = dlib_rect.bottom() # 오른쪽 아래
cv2.rectangle(img_show, (l, t), (r, b), (0, 255, 0), 2, lineType=cv2.LINE_AA)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()rectangles[[(141, 201) (409, 468)]]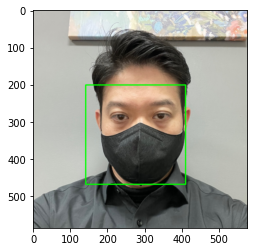
오...인식하네???
# 저장한 landmark 모델 불러오기
landmark_predictor = dlib.shape_predictor(model_path)
list_landmarks = []
# 얼굴 영역 박스마다 face landmark를 찾아내기
for dlib_rect in dlib_rects:
points = landmark_predictor(img_rgb, dlib_rect) # (RGB, rectangle)
# face landmark 좌표 저장하기
list_points = list(map(lambda p: (p.x, p.y), points.parts()))
list_landmarks.append(list_points)
print(len(list_landmarks[0]))
# landmark 점 찍기
for landmark in list_landmarks:
for point in landmark:
cv2.circle(img_show, point, 2, (0, 255, 255), -1)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()68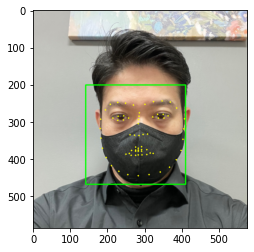
오~ 점도 찍혀.
# 좌표 확인하기
for dlib_rect, landmark in zip(dlib_rects, list_landmarks):
print(landmark[33]) # 코 끝의 index = 33
x = landmark[33][0]
y = landmark[33][1]
w = h = dlib_rect.width()
print('코의 위치 (x, y) : (%d, %d)' %(x, y))
print('box 크기 (w, h) : (%d, %d)' %(w, h))
# 스티커 이미지 시작 좌표 (top-left 좌표)
refined_x = x - w//2 # left
refined_y = y - h//2 # top
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('스티커 좌표 (x, y): (%d, %d)' %(refined_x, refined_y))(284, 337)
코의 위치 (x, y) : (284, 337)
box 크기 (w, h) : (269, 269)
스티커 좌표 (x, y): (150, 203)img_sticker = cv2.imread(sticker_path) # 스티커 이미지 불러오기
img_sticker = cv2.resize(img_sticker, (w, h)) # 스티커 resize
print(img_sticker.shape)(269, 269, 3)# (코의) x, y 좌표 조정 (top-left 좌표)
# 스티커 이미지 시작 좌표
refined_x = x - w//2# left
refined_y = y - h//2 # top
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('(x, y): (%d, %d)' %(refined_x, refined_y))(x, y): (150, 203)# img_show 대신 img_rbg 이용해보기
sticker_area = img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]]
img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]] = \
np.where(img_sticker==0, img_sticker, sticker_area).astype(np.uint8)
plt.imshow(cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB))
plt.show()
오~ 마스크 쓴 고양이.
사진을 멀리
my_image_path = './camera_sticker/images/image3.png'
img_bgr = cv2.imread(my_image_path) # OpenCV로 이미지 불러오기
img_show = img_bgr.copy() # 출력 이미지 따로 보관
# RGB 이미지로 변형
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
plt.imshow(img_rgb)
plt.show()
# detector 선언
detector_hog = dlib.get_frontal_face_detector()
# detector_hog를 이용해 얼굴의 bounding box 추출
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
dlib_rects = detector_hog(img_rgb, 1) # (image, # of image pyramid)
# 찾은 얼굴 영역 박스 리스트
print(dlib_rects)
for dlib_rect in dlib_rects:
l = dlib_rect.left() # 왼쪽 아래
t = dlib_rect.top() # 왼쪽 위
r = dlib_rect.right() # 오른쪽 위
b = dlib_rect.bottom() # 오른쪽 아래
cv2.rectangle(img_show, (l, t), (r, b), (0, 255, 0), 2, lineType=cv2.LINE_AA)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()rectangles[[(544, 296) (619, 370)]]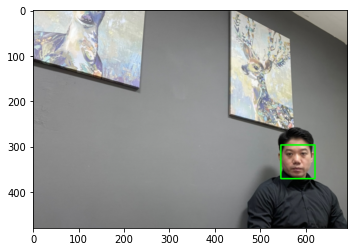
# 저장한 landmark 모델 불러오기
landmark_predictor = dlib.shape_predictor(model_path)
list_landmarks = []
# 얼굴 영역 박스마다 face landmark를 찾아내기
for dlib_rect in dlib_rects:
points = landmark_predictor(img_rgb, dlib_rect) # (RGB, rectangle)
# face landmark 좌표 저장하기
list_points = list(map(lambda p: (p.x, p.y), points.parts()))
list_landmarks.append(list_points)
print(len(list_landmarks[0]))
# landmark 점 찍기
for landmark in list_landmarks:
for point in landmark:
cv2.circle(img_show, point, 1, (0, 255, 255), -1)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()68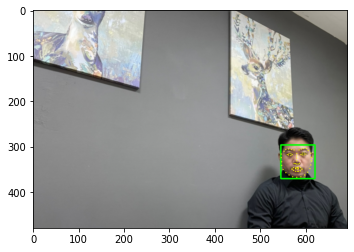
# 좌표 확인하기
for dlib_rect, landmark in zip(dlib_rects, list_landmarks):
print(landmark[33]) # 코 끝의 index = 33
x = landmark[33][0]
y = landmark[33][1]
w = h = dlib_rect.width()
print('코의 위치 (x, y) : (%d, %d)' %(x, y))
print('box 크기 (w, h) : (%d, %d)' %(w, h))
# 스티커 이미지 시작 좌표 (top-left 좌표)
refined_x = x - w//2 # left
refined_y = y - h//2 # top
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('스티커 좌표 (x, y): (%d, %d)' %(refined_x, refined_y))(579, 338)
코의 위치 (x, y) : (579, 338)
box 크기 (w, h) : (76, 76)
스티커 좌표 (x, y): (541, 300)img_sticker = cv2.imread(sticker_path) # 스티커 이미지 불러오기
img_sticker = cv2.resize(img_sticker, (w, h)) # 스티커 resize
print(img_sticker.shape)(76, 76, 3)# (코의) x, y 좌표 조정 (top-left 좌표)
# 스티커 이미지 시작 좌표
refined_x = x - w//2# left
refined_y = y - h//2 # top
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('(x, y): (%d, %d)' %(refined_x, refined_y))(x, y): (541, 300)# img_show 대신 img_rbg 이용해보기
sticker_area = img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]]
img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]] = \
np.where(img_sticker==0, img_sticker, sticker_area).astype(np.uint8)
plt.imshow(cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB))
plt.show()
사진을 어둡게.
my_image_path = './camera_sticker/images/image4.png'
img_bgr = cv2.imread(my_image_path) # OpenCV로 이미지 불러오기
img_show = img_bgr.copy() # 출력 이미지 따로 보관
# RGB 이미지로 변형
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
plt.imshow(img_rgb)
plt.show()
# detector 선언
detector_hog = dlib.get_frontal_face_detector()
# detector_hog를 이용해 얼굴의 bounding box 추출
img_rgb = cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB)
dlib_rects = detector_hog(img_rgb, 1) # (image, # of image pyramid)
# 찾은 얼굴 영역 박스 리스트
print(dlib_rects)
for dlib_rect in dlib_rects:
l = dlib_rect.left() # 왼쪽 아래
t = dlib_rect.top() # 왼쪽 위
r = dlib_rect.right() # 오른쪽 위
b = dlib_rect.bottom() # 오른쪽 아래
cv2.rectangle(img_show, (l, t), (r, b), (0, 255, 0), 2, lineType=cv2.LINE_AA)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()rectangles[[(167, 242) (390, 464)]]
# 저장한 landmark 모델 불러오기
landmark_predictor = dlib.shape_predictor(model_path)
list_landmarks = []
# 얼굴 영역 박스마다 face landmark를 찾아내기
for dlib_rect in dlib_rects:
points = landmark_predictor(img_rgb, dlib_rect) # (RGB, rectangle)
# face landmark 좌표 저장하기
list_points = list(map(lambda p: (p.x, p.y), points.parts()))
list_landmarks.append(list_points)
print(len(list_landmarks[0]))
# landmark 점 찍기
for landmark in list_landmarks:
for point in landmark:
cv2.circle(img_show, point, 2, (0, 255, 255), -1)
img_show_rgb = cv2.cvtColor(img_show, cv2.COLOR_BGR2RGB)
plt.imshow(img_show_rgb)
plt.show()68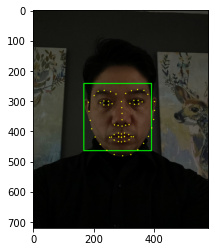
# 좌표 확인하기
for dlib_rect, landmark in zip(dlib_rects, list_landmarks):
print(landmark[33]) # 코 끝의 index = 33
x = landmark[33][0]
y = landmark[33][1]
w = h = dlib_rect.width()
print('코의 위치 (x, y) : (%d, %d)' %(x, y))
print('box 크기 (w, h) : (%d, %d)' %(w, h))
# 스티커 이미지 시작 좌표 (top-left 좌표)
refined_x = x - w//2 # left
refined_y = y - h//2 # top
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('스티커 좌표 (x, y): (%d, %d)' %(refined_x, refined_y))(293, 383)
코의 위치 (x, y) : (293, 383)
box 크기 (w, h) : (224, 224)
스티커 좌표 (x, y): (181, 271)img_sticker = cv2.imread(sticker_path) # 스티커 이미지 불러오기
img_sticker = cv2.resize(img_sticker, (w, h)) # 스티커 resize
print(img_sticker.shape)(224, 224, 3)# (코의) x, y 좌표 조정 (top-left 좌표)
# 스티커 이미지 시작 좌표
refined_x = x - w//2# left
refined_y = y - h//2 # top
if refined_x < 0:
img_sticker = img_sticker[:, -refined_x:]
refined_x = 0
if refined_y < 0:
img_sticker = img_sticker[-refined_y:, :]
refined_y = 0
print('(x, y): (%d, %d)' %(refined_x, refined_y))(x, y): (181, 271)# img_show 대신 img_rbg 이용해보기
sticker_area = img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]]
img_bgr[refined_y: refined_y+img_sticker.shape[0],
refined_x: refined_x+img_sticker.shape[1]] = \
np.where(img_sticker==0, img_sticker, sticker_area).astype(np.uint8)
plt.imshow(cv2.cvtColor(img_bgr, cv2.COLOR_BGR2RGB))
plt.show()
회고
기본
일단 얼굴이 인식되면 스티커를 붙이는 것은 어렵지 않음.
- 사진 크기에 따라서 랜드마크 점이 잘 보이지 않아 처음엔 없는 줄 알고 많은 시간을 헤멤 ㅜㅜ
- 이 점 크기에 대한 설명을 내가 제대로 못봤나..ㅡㅜ
- 생각보다 얼굴인식이 잘 되는 것 같아서 신기했는데
- 다른 분들의 이야기를 들어보면 어두운 곳에서는 인식이 안된다고 했는데 인식이 잘 되는 듯.
- 요즘 마스크를 쓰는 것이 대세라 마스크를 쓰고 해봤는데 잘되고.
- 왕관할 때는 이미지 자르는 부분이 조금 헷갈렸는데 수염은 왕관이 아니라 조금 다행이라는 생각이 들었습니다.
- 얼굴의 모양이 이상한 건지 얼굴인식이 사진에 따라 조금씩 좌우로 쏠리는데 어떤 규칙성이 있는지는 아직 파악이 안됨
- 처음에 코의 위치를 30으로 잡을지 33으로 잡을 지 고민했는데 33이 더 자연스러운 것 같아서 33으로 결정.
- 개발자들이 이 코드를 다 외워서 코딩하는지 갑자기 궁금해짐.
- 다 해놓고 보니 여러사람이 있을 때 어떻게 나올지 조금 궁금해짐
각도
- 각도의 영향으로 얼굴인식이 크게 달라지는 것은 못 느꼈지만
- 각도에서 이목구비가 정확히 나타나지 않는다면 인식률이 많이 떨어질 것이라 생각됨.
- 조원들 보니 각도에 따라 인식이 안되는 경우가 있다고 함
- 결론은 점이 찍히는 포인트가 충족 되느냐 아니냐 하는 부분인듯.
- 일단은 잘 나와서 좋은데..
- 이걸 앱으로 구현할 수 있나 하는 부분에서 막연해짐.
- 그래도 일단 잘 붙었으니 좋다.
- 사진의 방향을 틀어주는 방법도 있을거라 생각함.
마스크
-
앞서의 결과에 따라 마스크를 쓰면 인식이 안될 것이라고 생각했음
-
왠걸...왜 인식이 되지???
-
마스크가 뾰족해서 코로 인식하고 입 부분 음영이 입으로 인식이 되었나 하는 생각이 듬.
-
마스크 코부분의 고정쇠 부분이 튀어나와있어 코로 인식된 것 같음.
-
전체 점의 70%정도만 인식이 되면 될 것 같다는 추측.
-> 이걸 어디서 확인 할 수 있을것 같은데.. -
프로젝트는 피드백이 없어서 아쉬움
작은 사진
- 픽셀이 심각하게 뭉게지지 않으면 인식할 것이라 추측
- 사진에서 멀리 있어도 이목구비가 뚜렸하게 나올 수 있도록 사진을 찍음
- 거리에 있어서 이목구비 구분만 잘되면 인식되는 것 같음.
- 이미지 인식은 역시 콘트라스트가 중요하다고 확인함.
어두운 사진
- 하...인식 됨...
- 성능이 굉장히 좋은 것 같음.
- 예측은 빗나감.
- 내가 대충 애매한데 얘는 이걸 또 인식함..
- 덜 어두웠나..
- 뭐 인식이 안된게 있어야 분석을 하는데..
문제점같지 않은 문제점..ㅜㅜ
-
얼굴 각도에 따라 스티커를 회전시키는 것도 적용해야 할듯.
-
멀리서 촬영하면 왜 안될까요..
->> 됐는데요 ㅜㅜ
- 옆으로 누워서 촬영하면 왜 안될까요..
->> 됐는데요.. ㅜㅜ
- 실행속도가 왜 중요할까요?
->> 사진을 인식할 떄 실행속도가 느리면 사진이 제대로 작동하지 않는 것과 같지 않을까?
- 정확도 역시
->> 인식률이 좋아야 그 효율 가치가 있는 것이니..
궁금해진 사항은
- 다양한 사진 어플의 경우 어느 정도 학습을 시키고 출시한 것일까?

마케팅을 위한 인공지능 설계와 스타트업 Log