
좌표계 변환(Change of Basis):
좌표계 :: 좌표값 = 행렬 :: 벡터
벡터의 표현: 고등교과과정부터 시작하기
벡터는 크기와 방향을 가진 물리량으로 다음과 같이 표현될 수 있습니다
벡터의 물리적 표현 (좌표계 없는 표현)
벡터 를 화살표로 표현한다
- 의 크기 : 화살표의 길이
- 의 방향 : 화살표의 방향
벡터의 수학적 표현 (좌표계 있는 표현)
벡터 를 화살표로 표현한다
좌표계를 도입한 후, 벡터의 시작점을 원점에 맞추고 끝점의 위치를 벡터 의 수학적 표현으로 정의한다
- 의 크기 : 화살표의 길이를 계산
- 의 방향 : 화살표의 방향을 벡터로 표현
좌표계(Coordinate System)
다음과 같이 2-벡터 가 주어졌다고 하자.
이 벡터는 -평면 상에서는 원점에서 시작하여 에서 끝나는 벡터를 의미한다.
는 다음과 같이 해석될 수 있다 (선형조합)
즉, 수식의 각 요소는 다음과 같다
- : -축으로 내린 수선의 발. 즉, -축의 단위로 번 전진함
- : -축으로 내린 수선의 발. 즉, -축의 단위로 번 전진함
- -좌표계:
예제
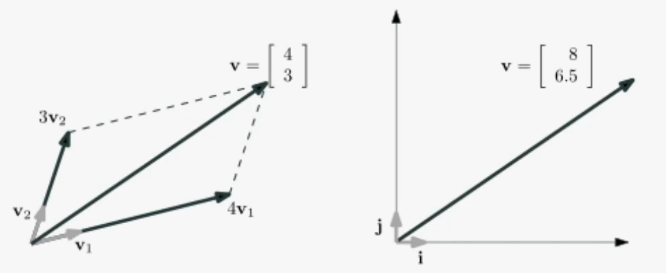
만일 두 벡터 과 를 이용해 새롭게 좌표계를 만든다면 의 좌표값은 무엇일까요?
새로운 좌표계를 만든다는 말은 어떤 벡터 에 도착하기까지의 과정을 오롯이 과 를 몇 번 사용하여 도착했는지로 표현한다는 의미입니다.
즉, 과 를 이용해 만든 새로운 좌표계에서 좌표값은 이라 해야합니다.
왜냐하면,
이기 때문입니다
일반적인 좌표계에서 좌표값은 임!
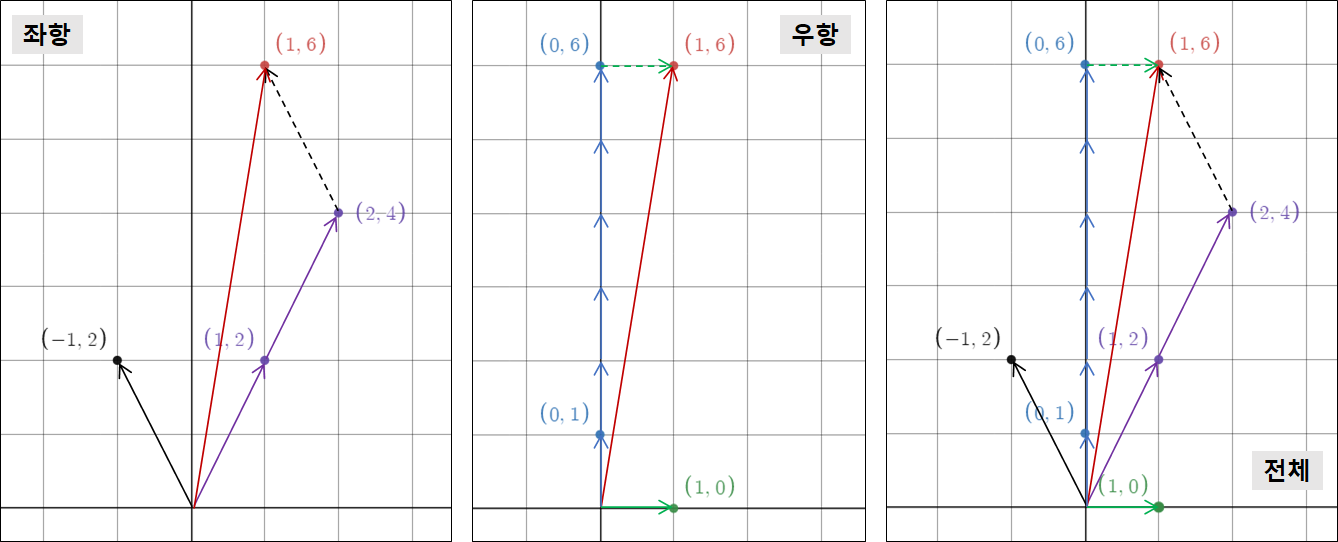
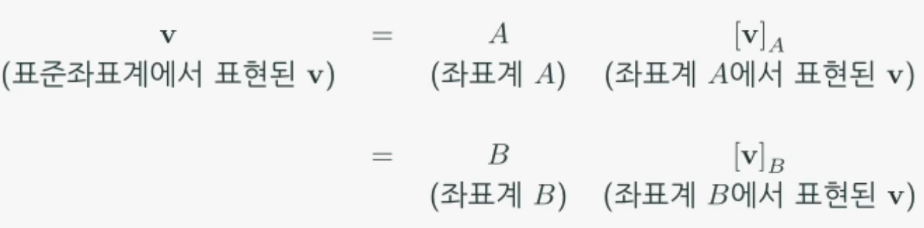
지금까지의 전체과정을 행렬로 표현하면 아래와 같습니다
위 식의 (좌항)과 (우항)이 표현하는 바는 다음과 같습니다
- 우항 :
- 과 를 기저(basis)로 가지는 표준좌표계(standard coordinate system)에서 벡터 의 좌표값은 입니다 위의 예제에서는
- 좌항 :
- 과 를 기저(basis)로 가지는 좌표계(coordinate system)에서는 동일한 벡터 의 좌표값이 입니다
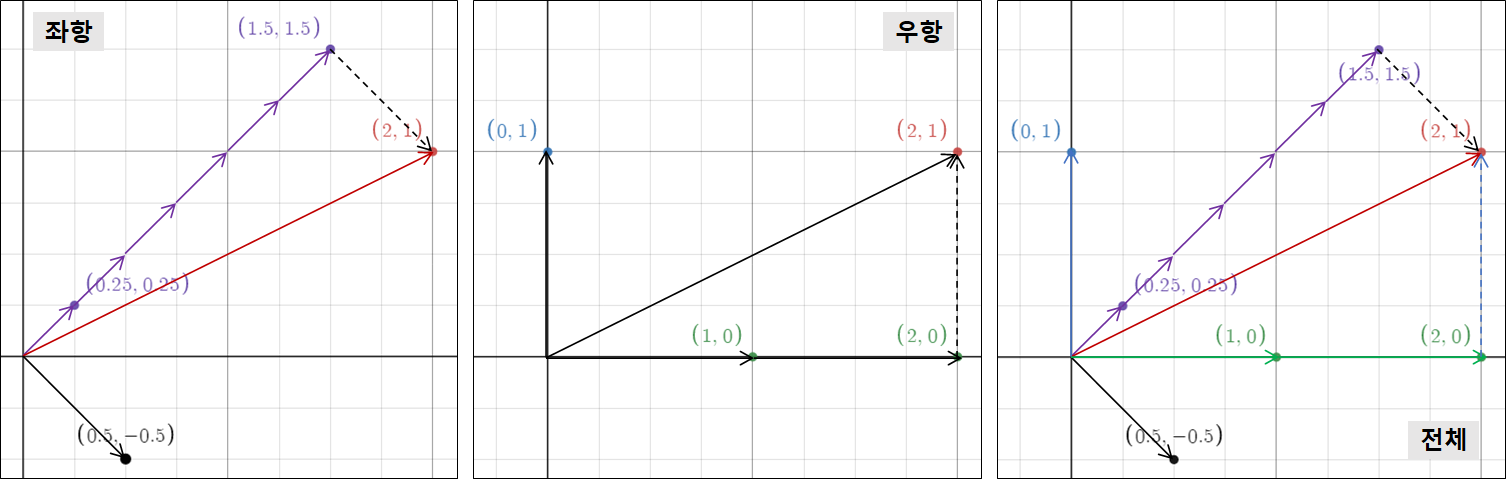
좌표계 변환(Change of Basis)
이제 선형시스템(linear system)문제를 좌표계 변환으로 바라보는 새로운 시선을 배웠습니다
- 우항 : 표준좌표계(standard coordinate system)에서 어떤 벡터의 좌표값은 이다
- 좌항 : 의 열벡터들을 기저(basis)로 가지는 좌표계에서 동일 벡터의 좌표값은 이다
-
예
우항은 이렇게 다시 나타낼 수 있다
즉, 은 우리가 알고 있는 표준좌표계에서 어떤 벡터의 좌표값을 의미하고
의 열벡터를 기준으로 하는 좌표계에서의 좌표값은 인 이 되는 것!둘은 동일하다!!
-
역행렬을 이용해 선형시스템의 해를 구하는 문제 역시 좌표계 변환으로 바라볼 수 있습니다
- 우항 : 의 열벡터들을 기저(basis)로 가지는 좌표계에서는 동일 벡터의 좌표값은 이다
- 좌항 : 표준좌표계(standard coordinate system)에서 어떤 벡터의 좌표값은 이다
예
이때는 은 우리가 알고 있는 표준좌표계에서 어떤 벡터의 좌표값을 의미하고
의 열벡터를 기준으로 하는 좌표계에서의 좌표값은 인 이 되는 것!관점의 차이다!!
정리
행렬은 좌표계이고, 벡터는 좌표값입니다
임의의 는 다양한 좌표계에서 표현될 수 있습니다
예제 문제
예제 #1.
2-벡터 가 표준좌표계에서 으로 표현된다고 합시다
벡터과 를 기저벡터로 가지는 새로운 좌표계를 도입했을 때, 해당 벡터 는 어떤 좌표값을 가질까요?
예제 #2.
3-벡터 가 표준좌표계에서 으로 표현된다고 합시다
벡터과 를 기저벡터로 가지는 새로운 좌표계를 도입했을 때, 해당 벡터 는 어떤 좌표값을 가질까요?
