
벡터에 대한 고찰
고등 교과과정부터 시작하기
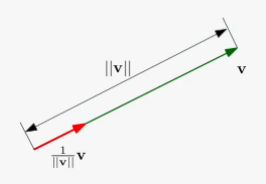
-벡터는 크기와 방향을 가진 물리량으로 다음과 같이 표현될 수 있습니다
좌표계 없이 표현
- : 화살표로 표현
- 의 크기 : 화살표의 길이 측정
- 의 방향 : 화살표의 방향 측정
좌표계를 도입하여 표현
- 의 크기 :
- 의 방향 :
벡터의 내적(Inner product)
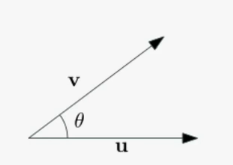
두 벡터 와 에 대한 내적(inner product 혹은 dot product)는 다음과 같이 정의된다.
좌표계 없이 표현
두 -벡터의 길이와 두 벡터 간의 사이각 을 통해 다음과 같이 정의된다
좌표계를 도입하여 표현
, 의 좌표값을 통해 다음과 같이 계산된다
두 벡터 간의 내적이 0이면 두 벡터는 직교(orthogonal)이다
직교의 물리적 의미
일 때, 방향으로의 전진은 방향에서 전혀 측정되지 않는다. 그 반대도 마찬가지이다.
** 고교 과정에서 배운 -좌표계나 -좌표계가 직교좌표계였음을 상기하도록 하자
서로가 독립적이다!
벡터의 투영(Projection)
두 벡터 가 있을 때, 벡터 를 위에 투영한 벡터를 라 하고 다음과 같이 구한다
-
길이
-
투영한 벡터 의 길이는
-
이므로,
-
-
-
방향
-
투영한 벡터 의 방향은 a의 방향과 일치하므로 a의 방향을 구한다
-
즉,
-
스칼라와 벡터를 분리해서 적으면, 가 되고, 스칼라 값은 벡터 에 대한 스케일 값이 된다.
벡터 를 위에 투영하고 남은 보완 벡터(complement vector)는 이다
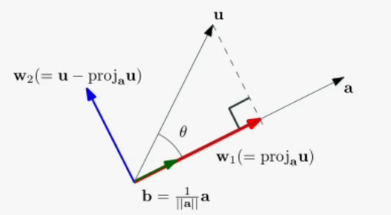
중요한 점은 투영한 벡터와 보완벡터가 서로 직교한다는 것임!!
즉, 투영을 통해 두 벡터를 직교분할 할 수 있음!
벡터의 직교분해(Orthogonal Decomposition)
두 벡터 가 있을 때, 투영과 보완의 개념을 이용해 직교분할 할 수 있다
직교행렬(Orthogonal Matrix)
직교좌표계에 대한 행렬 표현
직교행렬(Orthogonal Matrix)이란?
행렬은 좌표계라는 의미를 이미 배웠다.
즉, 행렬은 각 열벡터가 기저(basis)를 이루는 좌표계(coordinate system)이다
직교행렬(orthogonal matrix)
주어진 행렬의 모든 열벡터가 서로 직교한다면(내적 = 0), 이 행렬을 직교행렬이라 한다
직교행렬은 직교좌표계를 의미한다
정규직교행렬(orthonormal matrix)
주어진 행렬이 직교행렬이고 모든 열벡터의 크기가 1이라면 이 행렬을 정규직교행렬이라 한다
정규직교행렬은 정규직교좌표계를 의미한다
정규직교행렬을 회전행렬(rotation matrix) 이라고도 함
(x, y축을 회전시켜 놓은 것으로 생각할 수 있기 때문)
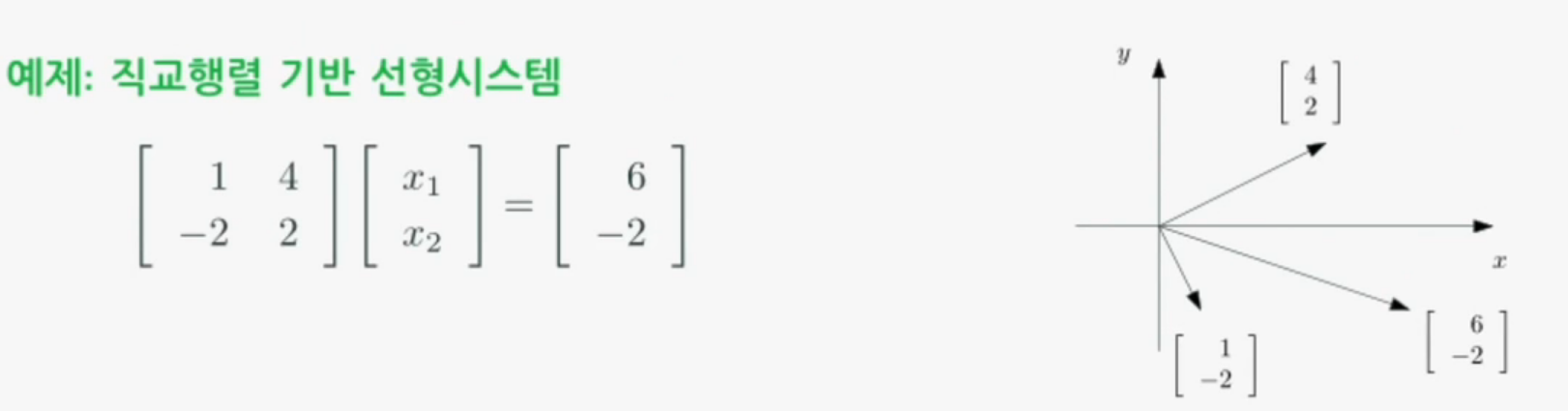
직교행렬(Orthogonal Matrix)을 이용한 선형시스템
선형시스템 에서 행렬 가 직교행렬(orthogonal matrix)이면, 해(solution) 는 역행렬 의 계산 없이 다음과 같이 구할 수 있다
-
의 -번째 요소는 투영(projection)으로 계산할 수 있다.
- 즉, 벡터 를 행렬 의 각 열벡터 에 투영한 연산 로부터 임을 계산할 수 있다.
-
의 -번째 요소와 -번째 요소의 계산은 독립적이다.
- 즉, 의 계산은 병렬처리 가능하다
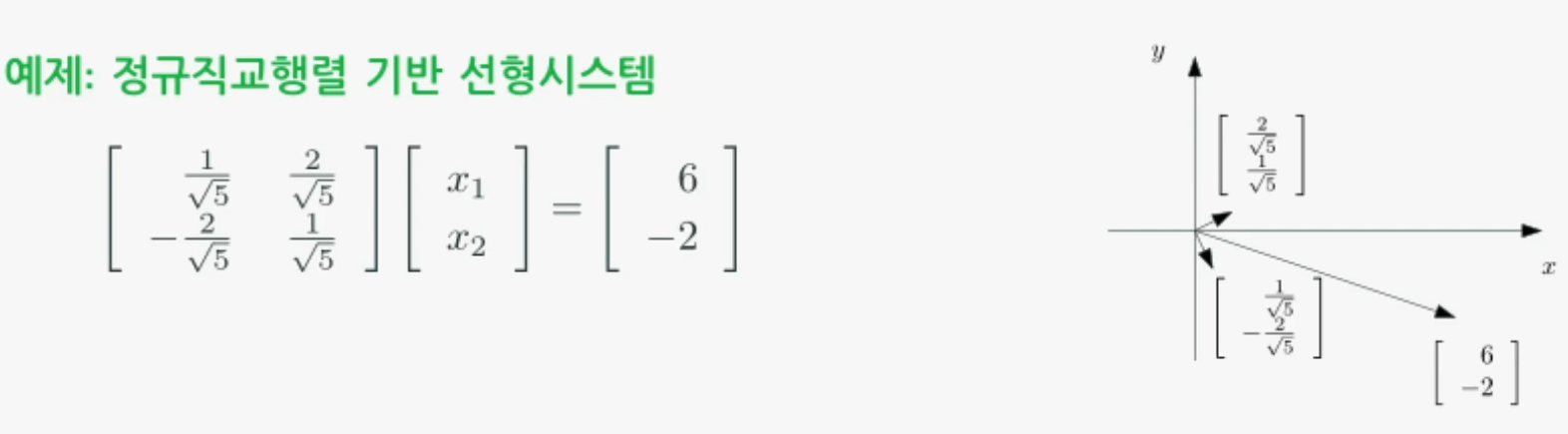
정규직교행렬(Orthonormal Matrix)을 이용한 선형시스템
선형시스템 에서 행렬 가 정규직교행렬(orthonormal matrix)이면, 해(solution) 는 역행렬 의 계산 없이 다음과 같이 구할 수 있다
-
의 -번째 요소는 내적(inner product)으로 계산할 수 있다.
-
정규직교행렬은 열벡터의 크기가 1이므로!
-
즉, 벡터 를 행렬 의 각 열벡터 에 투영한 연산 로부터 임을 계산할 수 있다.
-
-
의 -번째 요소와 -번째 요소의 계산은 독립적이다.
즉, 의 계산은 병렬처리 가능하다
QR 분해 : A = QR
주어진 행렬에서 정규직교행렬 추출
행렬분해(matrix decomposition)의 의미
주어진 행렬을 행렬분해된 상태로 가지고 있으면 여러모로 계산이 편한 경우가 많습니다
다음은 대표적인 행렬분해입니다
- 분해 ( decomposition)
- 분해 ( decomposition)
- 특이값 분해(SVD, Sigular Value Decomposition)
QR분해 (QR decomposition)
분해는 주어진 행렬을 아래의 형태를 가지는 두 행렬의 곱으로 나누는 행렬분해입니다
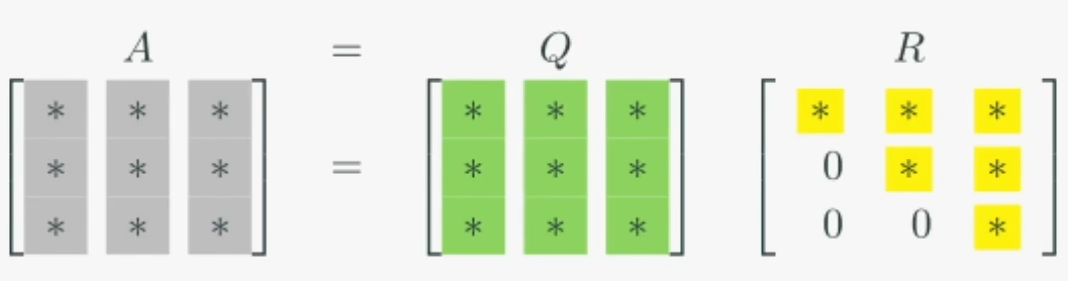
행렬 와 은 그 특성에 따라 다음과 같이 불립니다
- : 정규직교행렬(orthonormal matrix)
- : 상삼각행렬(upper traingular matrix)
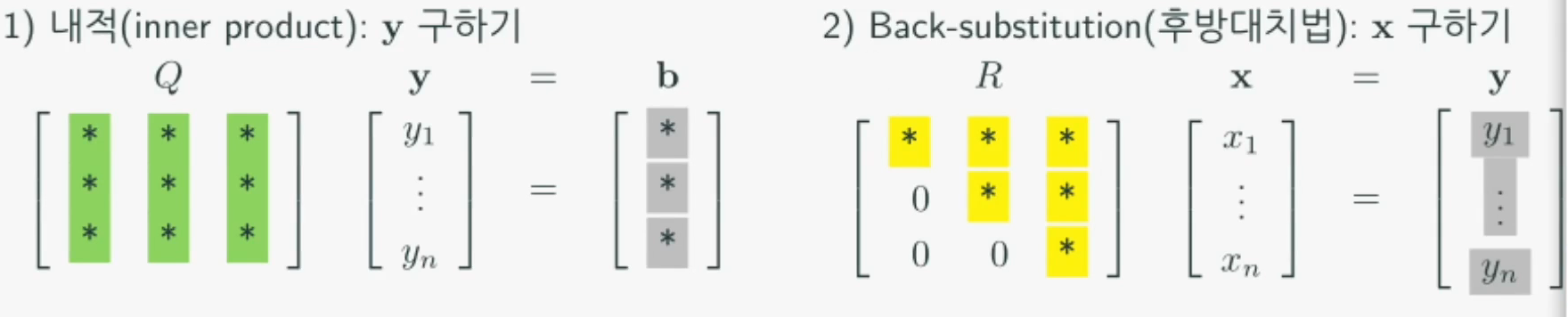
주어진 행렬 가 분해되어 있으면 무엇이 장점일까요?
분해를 이용해 문제를 아래와 같이 나타내면,
선형시스템을 다음과 같이 두 단계로 간단히 해결할 수 있음을 알 수 있습니다
QR분해 (QR decomposition)의 의미
분해는 그람-슈미트 과정(Gram-Schmidt process)을 행렬로 코드화 한 것입니다
엄밀하게 말하자면,
- : 행렬 에서 정규직교성을 추출한 행렬
- : 행렬 에서 정규직교성 추출 후 남은(residual) 상삼각행렬(upper traingular matrix)
여기서는 분해를 유도하는 수학적인 내용, 즉 그람-슈미트 과정(Gram-Schmidt process)은 다루지 않겠습니다. 다만, 분해가 주어진 행렬에서 정규직교성을 추출하여 계산의 편의를 도모한다는 점을 기억하기 바랍니다.
그람-슈미트 과정(Gram-Schmidt process) 참고자료
QR분해 (QR decomposition)의 활용
분해는 다음의 이유로 활용됩니다.
-
빠른 계산
- 선형시스템 의 해를 구할 때, 정규직교행렬(orthonormal matrix) 를 이용한 계산 부분은 병렬처리로 빨리 계산할 수 있습니다.
- 그러나, 을 이용한 계산 부분은 병렬처리 할 수 없습니다
-
가 자주 업데이트 되는 경우
-
선형시스템 에서 행렬 는 고정되어 있고 가 자주 변하는 문제가 종종 있습니다.
이런 경우, 행렬 를 미리 로 분해해 둔다면, 가 업데이트 될 때마다 선형시스템의 해 를 실시간으로 구할 수 있습니다
-
분해 vs. 분해
- 분해의 경우, 선형시스템을 풀 때 병렬처리 할 수 없습니다
- 분해의 경우, 행렬이 꽉찬 구조를 가진 행렬이므로 메모리 사용량이 많습니다
