본 글은 STM32F769I MCU를 기준으로 작성되었습니다.
세부적인 내용은 제품군마다 조금씩 다를 수 있습니다.
1. I2C란?
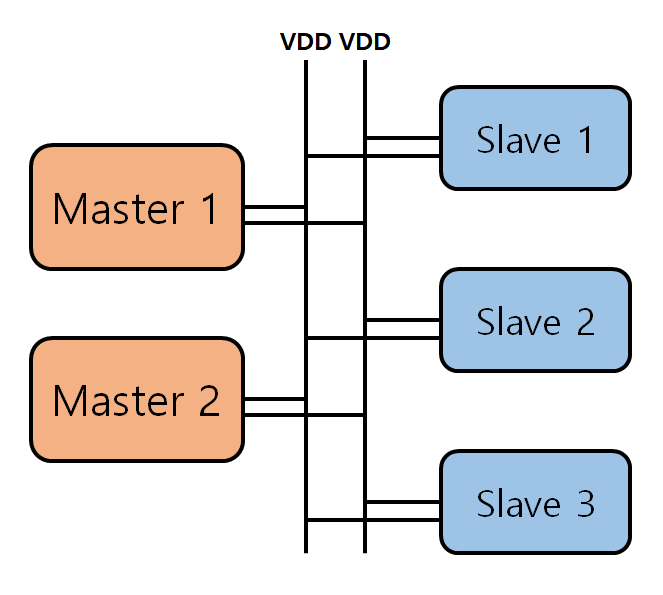
I2C란 Inter-Intergrated Circuit의 줄임말로, 서로 다른 IC 간에 데이터를 주고받기 위한 통신 중 하나이다. 기본적으로 두 개의 라인이 사용된다.
2. 예제
I2C 통신을 하는 예제를 만들어보자.
한 보드 내에서 I2C 두 조를 이용하면 가장 간단하게 만들 수 있으나, STM32F769I-DISC1 보드는 I2C를 두 개 쓰려면 외장 쪽보드가 별도로 필요하여 그러진 못했다.
따라서 ?? 보드와 점퍼로 연결하여 I2C 통신을 하는 예제를 만들어보았다.
STM32F769I-DISC1 보드에는 I2C1이 CN9의 D15, D14에 붙어있다고 한다.
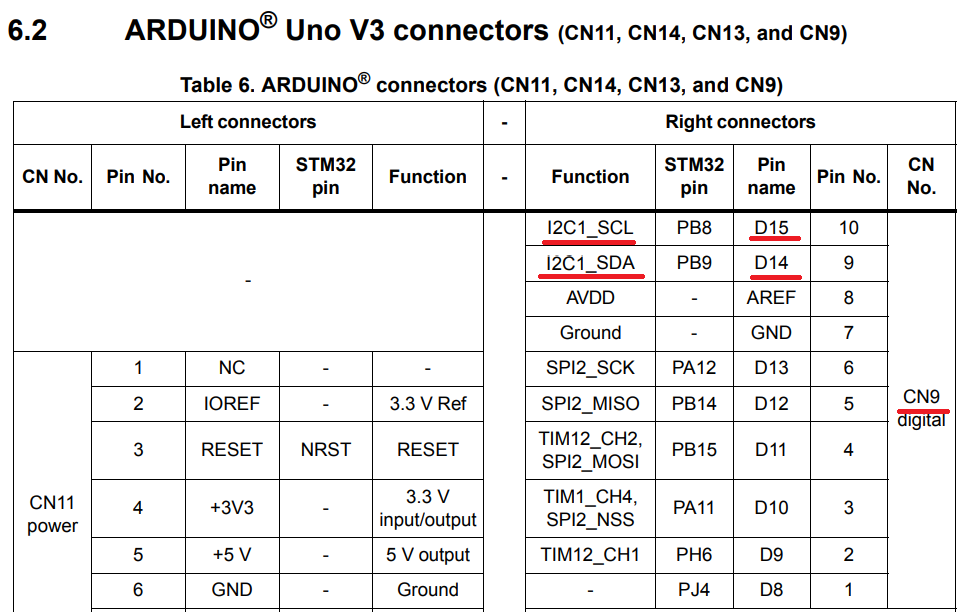
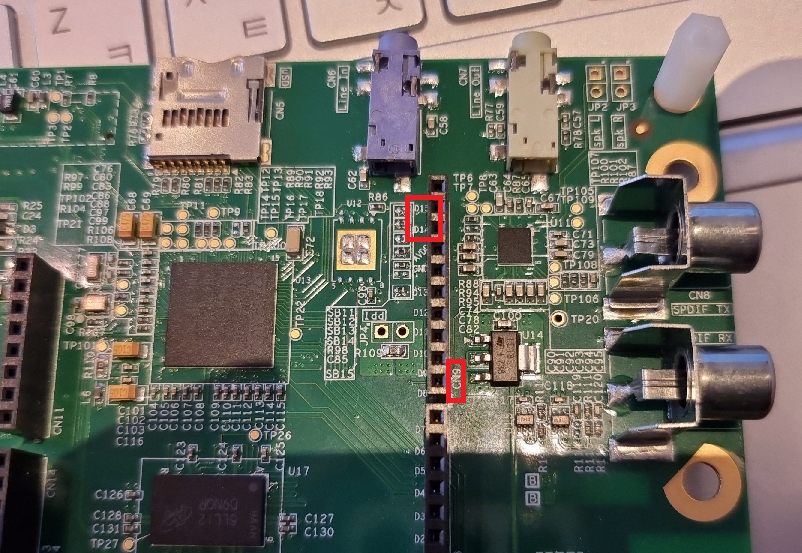
보드 상에서 해당 핀을 찾아보면 아래 그림의 위치와 같은데, 해당 핀에 점퍼를 날리면 아두이노 외에 다른 IC와도 통신을 할 수 있을 것 같다.
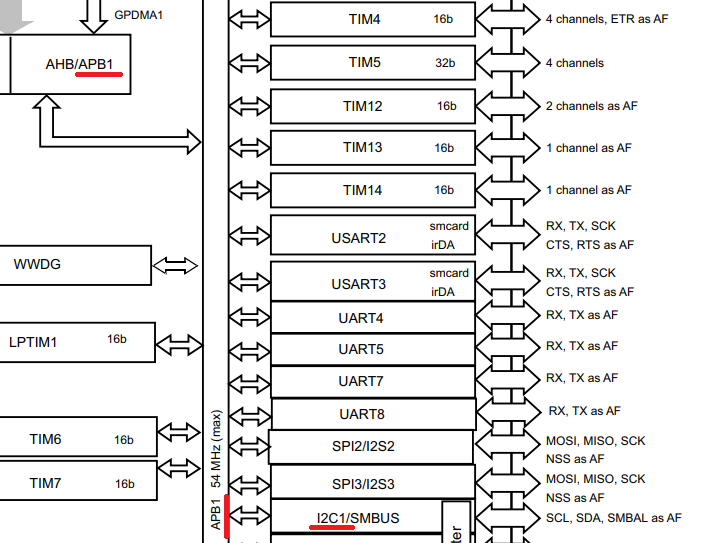
아래 그림에서 I2C1이 APB1 버스에 물려있는 것을 알 수 있다.
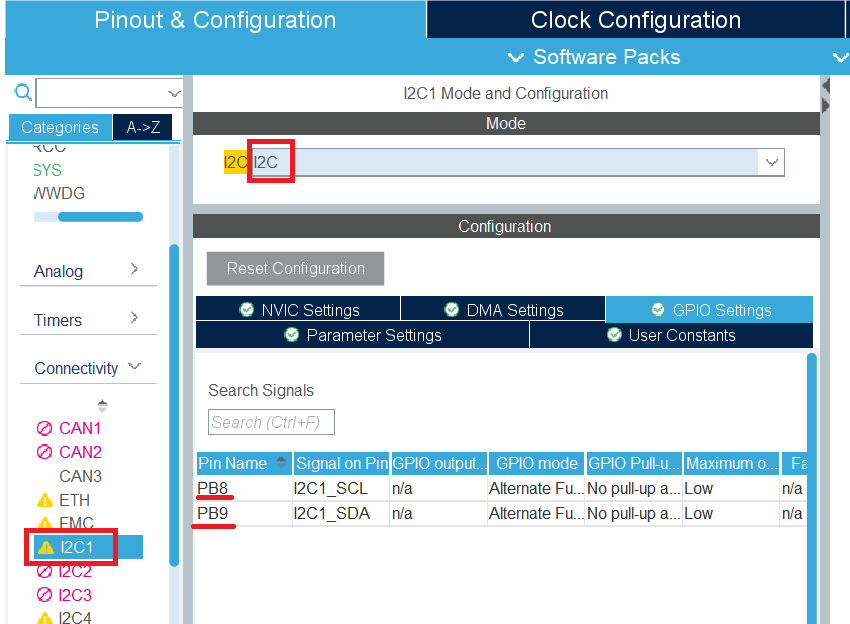
1. Configuration
I2C1을 I2C로 활성화한다.
SCL과 SDA가 각각 PB8, PB9에 매핑되어 있으니, GPIOB의 8번, 9번 핀을 AF로 설정해주어야 한다.
2. 코드 작성
Master로 동작하는 코드
#include "main.h"
I2C_HandleTypeDef hi2c1;
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = { 0, };
RCC_ClkInitTypeDef RCC_ClkInitStruct = { 0, };
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 192;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;
RCC_OscInitStruct.PLL.PLLQ = 4;
RCC_OscInitStruct.PLL.PLLR = 2;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3);
}
static void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x00506682;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
HAL_I2C_Init(&hi2c1);
HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE);
HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0);
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = { 0, };
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_8 | GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_LOW;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C1_Init();
HAL_StatusTypeDef recvStat;
unsigned devAddr = 0x52;
unsigned char rxData[3] = { 0, };
unsigned char txData[3] = { 0, };
while (1)
{
HAL_I2C_Master_Transmit(&hi2c1, devAddr, txData, 1, 100);
recvStat = HAL_I2C_Master_Receive(&hi2c1, devAddr, rxData, 1, 100);
if (recvStat == HAL_OK)
{
}
}
}
void Error_Handler(void)
{
}Slave로 동작하는 코드
#include "main.h"
I2C_HandleTypeDef hi2c1;
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = { 0, };
RCC_ClkInitTypeDef RCC_ClkInitStruct = { 0, };
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE3);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 192;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV4;
RCC_OscInitStruct.PLL.PLLQ = 4;
RCC_OscInitStruct.PLL.PLLR = 2;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3);
}
static void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x00506682;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
HAL_I2C_Init(&hi2c1);
HAL_I2CEx_ConfigAnalogFilter(&hi2c1, I2C_ANALOGFILTER_ENABLE);
HAL_I2CEx_ConfigDigitalFilter(&hi2c1, 0);
}
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = { 0, };
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_8 | GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_LOW;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
}
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C1_Init();
HAL_StatusTypeDef recvStat;
unsigned char rxData[3] = { 0, };
unsigned char txData[3] = { 0, };
while (1)
{
recvStat = HAL_I2C_Slave_Receive(&hi2c1, rxData, 1, 100);
if (recvStat == HAL_OK)
{
HAL_I2C_Slave_Transmit(&hi2c1, txData, 1, 100);
}
}
}
void Error_Handler(void)
{
}3. 빌드 및 실행 결과
(작성 예정)
개발자입니당 *^^* 깃허브 https://github.com/pikamonvvs