1. 가속도계
1) 물체에 작용하는 가속력과 진동력, 충격력 등 동적힘이 발생했을 때, 움직임의 변화에 따른 가속도의 변화를 순간적으로 감지 ->
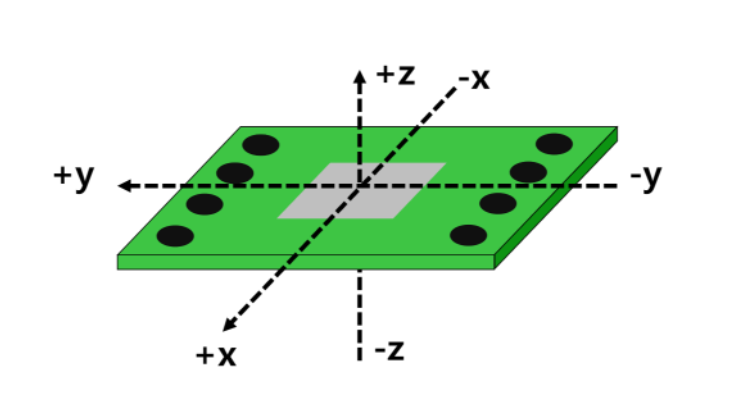
2) 중력가속도(g)를 X,Y,Z 축으로 벡터 3개()로 나누어 크기를 측정
3) 센서에서 얻어지는 출력값인 가속도를 적분하여 물체의 진행방향에 대한 속도를 계산할 수 있고, 이를 이용해 물체의 위치를 알아냄
- ex)y축 방향으로 45도 기울어짐(정지상태)
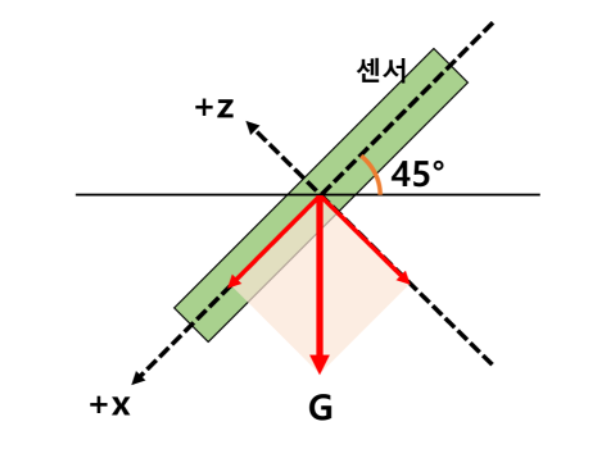
오일러각 구하기==>기울어진 자세를 알 수 있음
4) But, 중력 외 가속이 있는 경우(물체가 움직이는 경우)에는 가속도 센서만으로 정확한 기울기 찾는 게 불가능함 => 자이로스코프 사용
=+ +g
2. 자이로스코프(각속도 센서)
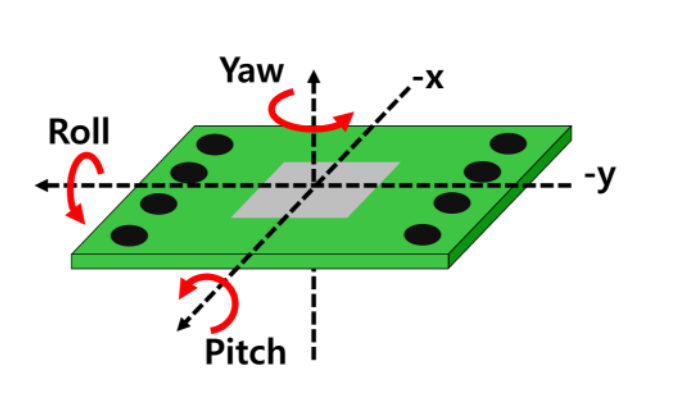
1) 물체의 회전 변화량인 각속도(단위:rad/s)을 측정
2) 중력을 이용하여 코리올리힘을 검출
3) 중력이 가해질 때 진동 속도가 변하는 것을 각속도로 계산해, 질량과 진동 속도를 통해 값을 측정하여 검출
각속도(angular velocity):특정 축을 기준으로 했을 때의 초당 회전 각도
코리올리 힘:회전체의 표면위에서 운동하는 물체에 대해 운동 속도 방향에 수직으로 작용하는 힘 ex)지구의 자전4) 회전각
속력=거리/시간 -> 각속도=회전한 각도/시간
속력x시간=거리 -> 각속도x시간=회전한 각도
5) 자이로는 정지할 때나, 아주 짧은 시간에 움직일 때는 오차 존재 x, but 움직일 때는 측정되는 각속도가 노이즈 등에 의해 에러가 발생하는데 이 오차가 적분시에 누적된다면 시간이 지날수록 누적오차가 매우 커짐
-> 기울어진 각도값이 실제와 차이 발생
참고
https://nerdymint.tistory.com/13
https://m.blog.naver.com/ccaa09/220704142932
https://velog.io/@717lumos/Sensor-IMU%EC%9D%98-%EA%B0%9C%EB%85%90-%EB%B0%8F-%ED%99%9C%EC%9A%A9%EB%B2%95
https://mechaworld.tistory.com/11
https://blog.daum.net/pg365/171
https://normal-engineer.tistory.com/35?category=954775