Local Interconnect Network
서브 네트워크 방식
간단한 기능 제어에 사용
저가 소형 센서 및 액츄에이터 연결에 활용
Single Wire 방식
최대 20Kbps
저가, 저속의 통신 프로토콜로 많이 사용됨
사용
간단한 기능의 ECU 제어용 로컬 네트워크
ex) 센서, 액추에이터, 스위치
Single Master / Multi Slave 구조
Single Master : 명령을 내리는 제어기
Multi Slave : 제어 명령에 따라 움직이는 제어기
각각 Single Wire로 연결됨
Master : header 정보 전달, 메시지 ID 정보
Slave : response 정보 전달
Master node + Slave node == 하나의 메시지 프레임 완성
Time-Triggered Schedule Communication
지정한 시간에 메시지가 전달되는 방식
Single-wire 방식에 적합
Master의 스케줄에 따른 Slave 동작
CAN과 비교
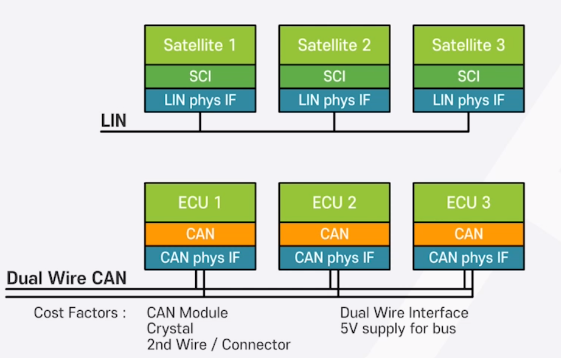
Wire 수 : CAN 2개, LIN 1개
통신방식 : CAN, LIN 일반적인 범용 SCI 통신 모듈 이용
전압표현 : CAN High/Low, LIN 0~12V 전압표현 가능
제어기 구조
MCU + Transiver ID 가 필요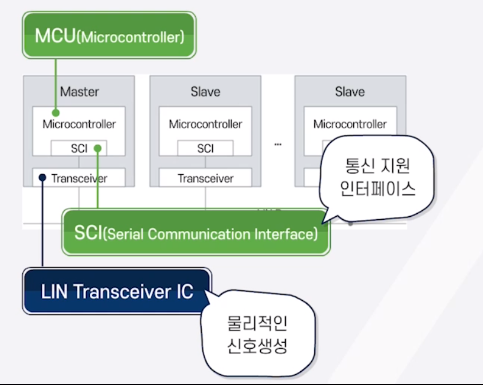
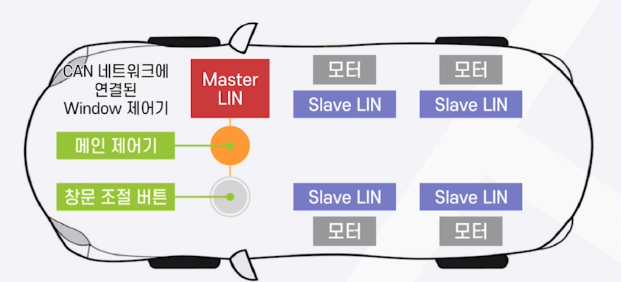
활용 사례
- Navigation
- Steering Wheel
- A/C
- DOOR
- SEAT
버튼 -> LIN 통신 -> 제어기
DC-LIN 통신
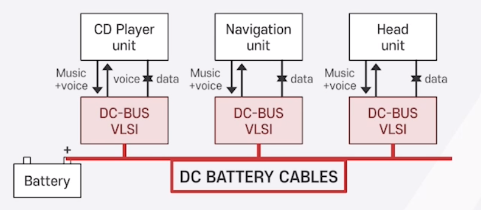
전원 선을 이용해 통신기능 사용
통신선 감소 -> 비용 절감, 무게 감소, 커넥터 활용 증가
기존의 LIN보다 5배빠른 115.2Kbps 지원
물리 계층을 담당하는 Transceiver IC 교체로 구현가능
적용 대상
BMS
Climate Control
Sensors/Actuator bus
