hmobilityclass
1.자율주행 자동차 기술 이해

자율주행 기술 지능화가 될수록 단계가 상승한다. 미국자동차공학회(SAE)에서 정한 기술 수준에 따른 자율주행 5단계 정의이다. 0~2 단계: 차량통제권 운전자운전의 책임이 운전자에게 있음주행의 조향이나 가감속을 자동화하는 수준3 단계: 차량통제권 자율주행차, 운전자의
2.자율주행 기술의 미래 발전방향
Fall back : 자율주행 시스템이 오류가 있거나 고장이 나는 경우 차량이 대응하는 기법주변 상황 예측 : 자율주행차 주행 시 주변의 상황이 미래에 어떻게 바뀔지를 예측하여 사고와 충돌을 방지대규모 데이터 관리 : 자율주행을 위한 인공지능 모델 학습을 위해 대규모
3.자율주행 기술 구성
인지 : 센서 신호를 이용하여 주변의 동적 객체들을 검출하고 객체들의 움직임과 의도를 알아내는 작업판단 : 인지와 측위 결과를 기반으로 경로를 계획하고 장애물을 피하는 등의 상위 판단을 내리는 작업제어 : 판단의 결과에 따라 차량을 운전하는 작업인지외부 환경 정보(센서
4.자율주행 기술의 요소
센서 : 외부 정보를 받아들이는 부분인지 : 센서 신호를 이용하여 주변의 동적 객체들을 검출하고 객체들의 움직임과 의도를 알아내는 작업측위 : GPS와 센서 정보 등을 활용하여 정밀지도 위에서 자율주행차의 위치를 추정센서카메라, 레이더, 라이다, 초음파센서, 다중 센서
5.자율주행 기술 인프라
C-ITS : 차세대 지능형 교통 시스템, 차량과 인프라 간의 협력V2X : 차량을 위한 통신 기술, 유/무선망을 통해 다른 차량 및 도로 등 인프라가 구축된 사물과 정보 교환MMS : 고정밀 지도 구축을 위한 시스템, 고정밀 지도 구축을 위한 데이터 수집라벨링 과정
6.자율주행 자동차 인지 기술
카메라 센서 : 빛을 전기적 신호로 변환하여 주변에 대한 정보를 2차원 배열 형태로 제공하는 자율주행 센서레이더(RADAR) 센서 : 전자기파인 RF 신호를 송출하고 목표물에 반사하는 수신파를 분석하여 물체의 거리, 각도, 속도 등의 정보를 얻어냄라이다(Lidar) 센
7.자율주행 자동차 인지기술-카메라
카메라 좌표계 : 카메라에서 물체를 표현하는 좌표계카메라 내부 파라미터 : 카메라 영상 좌표계와 3차원 월드 좌표계 변환을 위한 카메라 내부의 기계적인 셋팅에 관한 파라미터초점거리 : 렌즈의 중심과 이미지 센서(CMOS 또는 CCD)와의 거리주점 : 렌즈의 중심에서 이
8.자율주행 자동차 인지기술-레이더
레이더 센서의 종류 : 주파수 대역에 따라 24GHz, 77GHz로 구분, 신호 송신 방식에 따라 펄스 레이더, 연속파 레이더로 구분펄스 레이더 : 짧은 펄스 신호 수신, 송수신 신호 간의 전파지연 시간을 측정하여 상대 차량과의 거리 추정FMCW 레이더 : 주파수가 선
9.자율주행 자동차 인지 기술-라이다
라이다 센서의 특징 : 고출력 펄스 레이저를 사용하기 때문에 정확한 거리 측정 가능, 높은 센서의 가격이 장벽 회전형 라이다 : 센서를 직접 기계적으로 회전하여 360도 전방위 환경정보 획득, 가격이 높고 내구성이 약함 고정형 라이다 : 환경 정보를 획득하고자 하는 각
10.자율주행 자동차 인지 기술-고정밀 지도
RTK(Real Time Kinematic) : 정밀한 위치를 확보한 기준점의 반송파 오차 보정치를 적용하여 수 cm의 정밀도 표현관성항법 장치 : IMU 등 관성 센서 정보를 활용하여 움직이는 이동 경로를 측정하는 기술Local Dynamic Map(LDM)고정밀 지
11.자율주행 통합 인지시스템
자율주행 통합 인지시스템 구성센서 : 카메라, 레이더, 라이다, 초음파차량 네트워크 : 센서 데이터를 자율주행 컴퓨터로 가져오기 위한 통신 링크자율주행 컴퓨터 : 범용 계산을 위한 CPU, GPU. 고속 뉴럴네트워크 계산을 위한 가속기인지 소프트웨어 : 주변 환경 인지
12.자율주행 인지를 위한 AI 기술 심화
딥러닝(딥뉴럴네트워크) : 계층이 여러 개인 인경 신경망복잡한 입력과 출력과의 관계를 근사화하기 위한 모델계층 사이에 곱해지는 계수들이 딥러닝 구조를 결정함딥러닝 학습 과정 : 트레이닝 + 인퍼런스트레이닝(학습) : 정답을 달아놓은(라벨링) 트레이닝 데이터를 사용하여
13.자율주행 대규모 인지 데이터 기술 관리
자율주행 데이터 수집데이터 취득을 위한 전용차량을 통한 학습 데이터 수집실제 자율주행차에서 수집된 데이터를 클라우드로 전송인프라, 엣지 등에 센서를 장착하여 데이터 취득2 데이터 선별 및 검증데이터의 라벨링 과정에 많은 비용과 노력 소요현재 학습된 모델을 향상시키는데
14.카메라 캘리브레이션
월드 좌표계의 3차원 점 > 변환 > 2차원 영상의 픽셀의 좌표핀홀 카메라 행렬 모델내부 파라미터와 외부 파라미터의 행렬실제 카메라의 캘리브레이션에서는 렌즈의 왜곡까지 고려카메라 캘리브레이션월드 좌표계와 3차원 점과 대응하는 영상의 2차원 픽셀로의 변환 행렬 모델을 찾
15.카메라 기반 물체 딥러닝 기술
카메라 기반 물체 검출 기술카메라 영상에서 단일, 혹은 다중의 물체의 종류와 위치를 추정하는 기술물체의 위치는 물체를 포함하는 2차원 바운딩 박스로 표현Convolutional Neural Network(CNN) 사용 카메라 영상으로부터 추상적인 특징 지도 추출CNN을
16.카메라 기반 차로, 도로 영역 검출 딥러닝 기술
Semantic 영역 분할 (Semantic Segmentation)카메라 영상 내의 물체 영역을 의미있는 단위로 분할하는 방법픽셀기준 : 각 픽셀이 어느 카테고리 영역에 속하는 지를 분류개체 기준 : 물체의 정확한 경계 영역을 알아냄영상에서 물체를 이루는 픽셀이 어떤
17.차세대 레이더 센서 딥러닝 기술
기존 레이더 장점) 전자기파의 특성으로 주변 환경 변화에 강인함저렴한 가격으로 정확한 거리 정보 획득 가능단점)횡방향의 해상도가 높지 않음주변 장애물에 의한 반사에 의한 클러터로 물체를 정확하게 검출하지 못해 오탐률이 다른 센서에 비해 높음저해상도로 물체의 검출 결과
18.라이다 센서 딥러닝 기술
기계식 라이다전기 모터 사용해 기계식 회전주변 레이저 발사 각도 변경장점) 넓은 범위의 스캐닝 수행단점)진동 등에 의한 내구성 문제 발생솔리드 스테이트 라이다Optical Phased Array 배열 안테나 구조 이용안테나 원소의 위상 조절 -> 원하는 방향으로 레이저
19.3차원 물체 검출/추적 통합 기술
물체 검출 - 물체 추적 기술의 통합적 설계 필요(기존) 물체 검출 : 센서 데이터의 공간적 정보만 활용물체 추적 : 시간적 정보 활용(최근) 시간적 + 공간적 정보의 통합 설계로 인지 성능 개선물체 검출 : 시간적 움직임 정보 활용 \-> 물체의 움직임, 시간적 정보
20.카메라 기반 거리 측정 기술
거리 추정카메라 영상 -> 3차원 환경에서 거리값(Depth)를 알아냄스테리오 비전2개 이상의 카메라 영상을 이용하여 픽셀에 대한 거리 정보를 알아내는 기술\-> 최근 딥러닝이 거리 추정에 도입 - 단일 카메라로도 거리 추정 정확도 상승깊이 지도(Depth Map) 생
21.카메라, 레이더, 라이다 센서융합
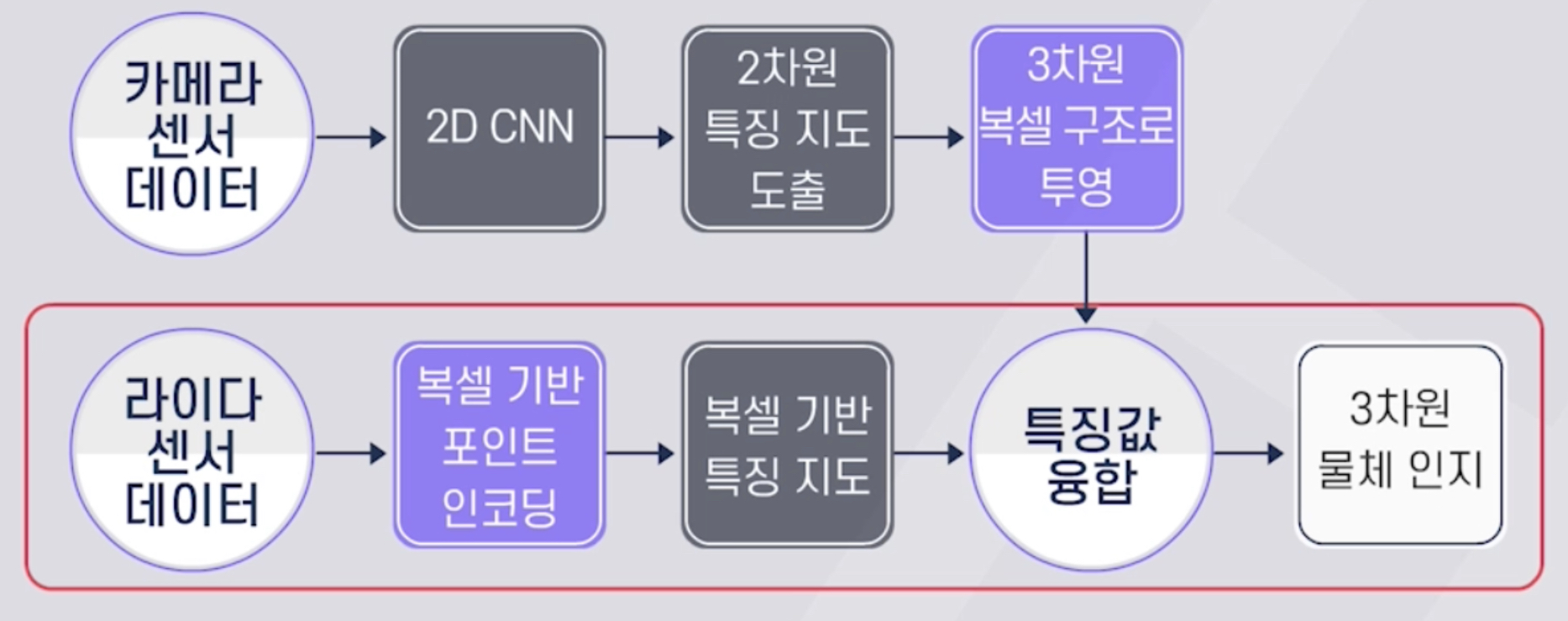
카메라, 레이더(RADAR) 센서 융합 딥러닝 기술레이더 : 오탐률이 높다는 단점카메라 : 딥러닝 적용으로 물체 검출 기술 성능 발전라이다에 비해 저렴한 가격으로 2단계 자율주행에서 자주 사용됨. 현재와 미래의 자율주행 기술에서 중요함. 카메라 영상 정보 + 레이더 거
22.AI기반 인지 하드웨어 플랫폼 기술
자율주행 컴퓨터: 카메라, 라이다, 레이더 등의 센서 데이터를 취득하여 인지기능을 수행하기 위한 하드웨어하드웨어 사양 : 실시간 계산 가능, 낮은 전력 소모\-> 자율주행차와 엣지에서 AI 수행을 위한 하드웨어 칩셋 필요칩셋 : 딥러닝 계산에 특화된 가속기가 필요함,
23.고성능 센서 차량 네트워크 기술
실시간 데이터 생성 및 실시간 데이터 처리를 위해 고속의 차량 네트워크 기술이 필요함다수의 다중 센서에서 실시간으로 유입되는 데이터 양의 증가카메라 (해상도 증가) , 라이다 (포인트클라우드 해상도 증가) -> 대용량 데이터 감당을 위한 차량 네트워크 필요CAN고속 데
24.고정밀 지도 관리 기술
고정밀 지도 : MMS 기술을 통해 사전 제작지형 지도 : 센서 데이터를 이용하여 주변 지형을 3차원 형태로 구성시맨틱 지도 : 측위와 관련된 특정 지형, 도로 정보, 랜드마크 등을 지형 지도에 추가한 지도자율주행 시 측위기술을 수행해야함측위기술 : 고정밀 지도 위에서
25.자율주행을 위한 예측 기술
경로 예측 기술: 동적 객체의 과거 경로, 주변 상황을 해석하여 동적 객체들의 의도나 미래 거동 예측고전 예측 기술등속도 또는 등가속도 모델에 의한 예측선형보간법에 의한 예측기법칼만필터와 같은 통계적 예측 모델을 사용해 예측동적 객체의 거동은 객체들의 의도, 주변 도로
26.자율주행차 센서 특징
카메라 센서(장점) 정보의 양이 많음, 원거리 객체 인지(단점) 거리 정보 약함, 빛, 날씨 등의 변화에 약함라이다 센서(장점) 360도 레이저 스캔, 거리 정보에 강함, 빛과 날시 변화에 강함(단점) 카메라에 비해 정보의 양이 적음, 센싱 정보의 양의 한계가 있음레이
27.자율주행차 센서 특징
카메라 센서(장점) 정보의 양이 많음, 원거리 객체 인지(단점) 거리 정보 약함, 빛, 날씨 등의 변화에 약함라이다 센서(장점) 360도 레이저 스캔, 거리 정보에 강함, 빛과 날시 변화에 강함(단점) 카메라에 비해 정보의 양이 적음, 센싱 정보의 양의 한계가 있음레이
28.차량용 통신 및 네트워크
통신 개념통신 : 전자나 전기 신호의 변화를 이용하여 정보를 공유하는 것Transmitter(발신기), Receiver(수신자), Message(정보), Channel(매체), Noise(방해 요소)자동차에서의 통신전자제어 장치 간의 통신ex) 조도 센서 정보 -> C
29.CAN 통신
(기존 산업용 통신) UART와 같은 1:1 통신은 여러 대의 제어기 간 정보 공유와 전송 속도, 실시간성을 맞추기 어려움(차량용 CAN 통신) 제어기 간 안정적인 정보 교환 가능차량용 맞춤 통신으로 비용, 무게, 안정성, 통신 속도 및 거리, 실시간성이 고려되어 개발
30.판단 기술
확고한 규칙에 따라 결과값 결정사람의 사고방식과 유사함간단한 환경에서는 적용 가능센서별 정보가 달라 상황별 신뢰해야 하는 센서가 변화함센서 정보와 도로 인프라 정보를 합리적인 경우로 판단해야 함주행 상황 시나리오별 적합한 주행 판단인공지능: 사고나 학습 등 인간이 가진
31.차선유지보조, 스마트 크루즈 컨트롤
ADAS 첨단 운전자 보조 시스템차선 이탈 경보 장치 (LDWS : Lane Departure Warning System)차로 유지 보조 (LKA : Lane Keeping Assist)ADAS = ASCC = SCC = ACC판단 관점에서 LKA & SCC차간 유지를
32.Failsafe
자율주행 프로세스 인지, 판단, 제어 중 기능적인 Fail이 발생한다면 이를 감지하여 다른 안전장치 작동으로 결정적 사고나 파괴를 예방하는 장치Fail Passive 운행을 통상 중지부품고장시 등 상업 기계에서 일반적으로 사용운행을 통상 정지Fail Active경고가
33.HD map
HD Map : 실시간 차량 센서 데이터와 HD Map 정보를 비교하여 위치인식 수행: HD Map 정보와 차량 센서가 획득한 주변 환경 정보와 비교를 통해 정적 정보 및 동적 정보 파악: 자율주행 시스템의 판단에 도움을 주는 HD Map 정보
34.A* 알고리즘
주어진 목표 꼭짓점까지 가는 최단 경로임을 판단할 수 있는 테스트를 통과하는 그래프/트리 탐색 알고리즘 현실 세계를 2D grid로 표현하여 Grid Map 상에서 최단 경로를 탐색, 결정 8 방향에 대한 Cost를 계산해서 출발지점에서 목표지점까지의 최적 경로를
35.RRT 알고리즘
무작위 샘플링을 사용하여 고차원의 구성 공간을 탐색하는 경로 계획 알고리즘랜덤하게 근접한 포인트들을 이어나가는 과정 -> 주행할 수 있는 경로들의 후보를 확장해 나가는 기술랜덤 특성을 지닌 경로 후보의 다발을 만들어주는 방식으로 Path Generation이 가능해짐중
36.SLAM
자차의 위치 인식 및 정밀지도 생성을 동시에 하는 알고리즘지도와 위치 정볼르 동시에 정확하게 만드는 기술IMU Internal Odometry로 자차 위치 정보를 얻는다면 IMU 누적 오차 성질에 의해 주행을 할수록 위치의 오차가 심해짐IMU 기반 위치 정보, Map
37.카메라 기반 위치인식
LiDAR와 공통점 : cm 영역의 위치인식 정확도를 확보하는 것이 중요LiDAR와 차이점 : LiDAR와 데이터 특성이 다름 -> cm 영역의 위치 인식이 쉽지 않음장점 : LiDAR에 비해 저렴함, 사람의 눈과 흡사한 표현 방식단점 : 날씨 및 조도 변화에 민감함\
38.시스템
필요한 기능을 실현하기 위하여 관련 요소를 어떤 법칙에 따라 조합한 집합체각 구성요소들이 상호작용하거나, 상호 의존하여 복잡하게 얽힌 통일된 하나의 집합체상태공간모델 : 상태변수의 움직임을 공간에서 나타내는 모델전달함수 : 입력 -> 수학적 모델 -> 출력핸들-바퀴 관
39.기계적 시스템 모델링
병진운동(좌우)질량 (M)= 무게= 힘과 가속도의 관계를 알려주는 계수스프링 (K)= 용수철= 위치와 힘의 상관관계를 나타내는 계수댐퍼 (fv)속력에 따른 힘의 차이속도와 토크와의 관계회전운동회전체의 위치, 각가속도, 각속도에 의한 토크(T)로 나타냄스프링, 관성모멘트
40.시간응답특성
입력에 대한 시간영역에서의 응답undamped system : 감쇠없이 입력 그대로 출력되는 시스템underdamped system : 감쇠비로 출렁이며 수렴critically damped system : 특정 조건 만족overdamped system : 과도한 감쇠비
41.시스템의 안정성, 동력, 제어
시스템의 안정성 : 시스템 출력이 발산하지 않는 것차량 속도가 0 일 때 입력 -> 속도 변화유한한 입력에 대해 출력 크기가 유한입력에 의한 응답, 초기 조건이 0모든 입력이 0 일 때 자동차의 속도변화
42.PID 제어기
피드백을 이용한 제어 방법 중 가장 널리 알려진 제어 방법출력 값 - 목표 값 = 오차Proportional 비례Integral 적분Derivative 미분비례P 제어정상상태 오차적분 제어기이득상수 값이 큰 경우 -> Overshoot 발생미분 제어기시간에 따른 오차
43.Brake-by-wire, 종방향 ADAS, AEB
전기적 신호를 통해 제동하는 시스템(pros)정교한 제어 가능응답특성 개선 가능설계 및 수정이 쉬움유압대비 경량으롱 연비향상 가능센서 : 운전자가 밟은 브레이크 압력 측정ECU : 센서 측정값을 입력 받아 감속력 계산 및 모터 움직임 정도 계산모터 (액츄에이터) : E
44.순향제어
정속주행 장치자동차가 지정한 속도를 유지할 수 있게 하는 장치제어기의 구성 -> 피드백 제어기를 하기 위해서는 어떤 출력값을 피드백 받아야함 연비문제속도 유지에만 초점이 맞춰짐 -> 불필요한 연료 소모차량 감지 기능 없음앞 차량이 있을 때 직접 제어 필요차량 정체, 옆
45.횡방향 ADAS
차량의 조향시스템과의 밀접한 관계를 가짐도로의 차로 인식 및 차로 유지장애물 인식 및 회피주행상황 판단 및 차로 변경ex) 차로유지시스템, 차로변경시스템목표 경로 -> 상위제어기 -> 목표 조향각 -> 하위제어기 -> 모터입력Lane Following Assist LK
46.현가시스템
= 서스펜션 Suspension차체와 차축 사이에 설치된 완충장치차체의 무게지지, 진동 및 충격 흡수 -> 승차감 향상급가감속, 급선회주행 -> 도로와 타이어 사이의 적절한 접지력 확보엔진에서 발생하는 동력을 바퀴에 전달함양쪽 끝에 달려있는 바퀴를 통해 차체의 무게 지
47.제어기술
시스템 = 전달함수 + 상태공간라플라스 변환 : 시간영역 -> 주파수 영역전달함수 : 입력과 출력의 비율주파수 영역에서 더 간단한 계산 가능시스템 특성을 나타내는 변수변위, 속도, 가속도를 기계시스템의 상태변수로 선정할 수 있음변위 : x1 = x(t)속도 : x2 =
48.상대거리 유지 제어
고정 상수 값(L) : 앞차량을 따라가는 목표거리뒤로 갈수록 오차가 점점 더 증가하는 현상사람에 따라 사고를 발생시킬 가능성이 있음전체 대열에서 앞 차량의 오차가 뒤 차량오차로 전파되지 않음현재 상대거리와 목표 상대거리의 차이(delta)String stability
49.차량 제어
고속도로의 효율적 사용주행 중 공기저항 감소로 자동차의 연비 향상운전의 피로 감소사고 위험도 감서유성기어에 의해 기계적인 연결을 유지하면서 입력 조향각 대비 출력 조향각 크기를 가변할 수 있음Steer by Wire (SBW)다양한 제어 전략 구현 가능, 무게를 줄일
50.자동차 동역학 모델
운동의 원인이 되는 힘을 고려해서, 이 힘이 시스템에 어떤 영향을 미치는지 분석해서 나타내는 방식고속력, 미끄러짐 -> 운동학 모델로는 역부족미끄러짐을 고려한 동역학을 이용한 자동차 움직임자동차의 속력은 일정하다는 가정서스펜션, 횡방향 경사각, 공기역학 등 무시자동차
51.Full State Feedback, LQ 제어기
상태변수를 이용한 제어 방식 중 하나모든 상태변수를 이용해 피드백 구조를 만들어 제어u = -Kx제어기의 이득값에 대한 계산 -> 전체 시스템의 안정을 돕는 것시스템 행렬의 고유 값의 실수 부분이 음의 부부에 있을 것 A - BK = Acl : Closed-loop 시
52.상태관측기 State Observer
센서로 얻을 수 없거나 측정 불가능한 값을 수식으로 관측 또는 추정하는 것Full State Feedback 방식 제어기 설계 시 필요 ( 일부 상태변수를 모를 때 설계)현실에서 알 수 없었던 x의 값을 x^으로 알 수 있게 됨실제 시스템 - 시스템 모델목표 : X^'
53.모델 예측 제어, 지능제어
차량에 자율주행을 적용할 때 다양한 제약 조건이 존재조향각의 속도가 너무 빠르면 안됨횡방향 가속도가 너무 크면 안됨자동차 엔진의 RPM이 너무 높아도 안됨브레이크가 낼 수 있는 최대 감속도의 양이 정해짐여러 제약 조건을 고려하면서 원하는 목표 경로를 잘 따라가는 것이
54.차량 통신의 종류
차량에는 내부적 연결과 외부와이 연결을 위해 다양한 통신이 사용됨.CAN : 제어 명령, 진단 통신에 주로 사용FlexRay : 제어 명령, 진단 통신에 주로 사용LIN : 차량 내의 센서 정보를 제어기에 전달 시 사용Ethernet : 멀티미디어, ADAS 등 다양한
55.LIN 통신
간단한 기능 제어에 사용저가 소형 센서 및 액츄에이터 연결에 활용최대 20Kbps저가, 저속의 통신 프로토콜로 많이 사용됨간단한 기능의 ECU 제어용 로컬 네트워크ex) 센서, 액추에이터, 스위치Single Master : 명령을 내리는 제어기Multi Slave :
56.Ethernet 통신
인터넷 사용을 위해 이용되는 통신 방식10Mbps ~ 100 Gbps, 일반적으로 100MbpsGiga Ethernet 1Gbps 까지 지원소비 전력, 온도 조건, 통신 신뢰성, EMC, 통신선 무게, 커넥터 형태 등의 문제로 차량에 적용하기 어려움차량에 존재하는 여러
57.TCP/IP 통신
네트워크를 통해 정보를 공유하는 표준 프로토콜의 집합주소표현, 형태표현, 송수신자 표현통신 방식이 아닌 데이터 표현의 표준을 정의한 것Transmission Control Protocol메시지 전달 시 데이터 분할 방법에 대한 규칙인터넷 프로토콜로서 인터넷 환경에서 I
58.진단통신
모든 차량에 진단 통신 적용배기가스 규제 목적차량 내부 정비의 용이2008년 이후 모든 차량 사용국제 표준으로 ISO15765 사용Unified Diagnostics Service진단 서비스를 위한 규칙을 정의한 통합 서비스진단 통신 이용 시 데이터를 주고 받을 수 있
59.게이트웨이
이종 통신 네트워크 간의 정보 교환내부 네트워크 관리외부 인터페이스 통제CAN controllerLIN ControllerEthernet SwitchAutosar 표준 소프트웨어 플랫폼을 기반으로 개발Fram Routing동일한 통신 네트워크 간의 메시지 전달PDU R
60.ITS
교통 시스템 및 시설에 전자제어, 통신기술을 접목해 교통 정보 및 서비스 제공, 교통 체계 운영 및 관리로 교통의 효율성 안정성 향상ex) 버스 도착 안내시스템, 하이패스, 실시간 교통정보, 신호등차량의 흐름 제어, 원활한 소통 기반 마련\-> 빠른 도로 이용 가능소요
61.V2X 통신
도로 인프라, 다른 차량과의 통신을 통해 정보를 교환, 공유하는 무선 통신 기술V2V (Vehicle to Vehicle)V2I (Vehicle to Infrastructure)V2P (Vehicle to Pedestrian)V2N (Vehicle to Network)
62.전기차 충전 시스템
배터리 충전 전력은 직접 전력망에 연결되어 공급전기차와 충전 인프라 간의 통신은 V2I의 한 종류Smart Power Grid 전력 공급 체계Charging Station 충전기 설치 장소Interface 충전기와 전기차 연결OBC (On Board Charger) 외
63.아키텍처
잘 구조화된 기틀, 프로세스나 결과물 등을 의미하며 최적화를 목표로 한 시스템의 구성과 동작 원리, 환경 구축 등의 설계청사진을 뜻함차량 내에 탑재될 기능을 기반으로 차량 개발 전략에 맞춰 전체 시스템의 구성을 정의하는 행위시스템 표준화 및 공용화 -> 규모의 경제 달
64.XCP 통신
CAN 통신을 이용해 데이터를 수집, 보정하기 위한 프로토콜제어기 내부의 데이터 수집, 튜닝 목적제어기 생산의 모든 단계에서 공통의 툴 사용Suspension ControlEngine management 엔지 성능 모니터링Transmission ControlCAN 통신
65.네트워크 관리
기밀성 Confidentiality 보안무결성 Integrity 중간에 변조가능성X가용성 Availability 실제 환경에서 구현 가능접근 제어변경 제어안전한 통신 기능 보장배터리 관리 기술Start-up, Shut-down의 동기화제어기의 동작 사태 모니터링Aliv
66.차량 통신 개요
Transport Protocol Expert Group실시간 교통정보, 여행정보 제공 표준 규격실시간 교통 정보 CTT : 국가 표준 노드 링크 기준에 따라 제공유고 정보 RTM : 사고, 공사, 재해, 행사, 통제 등 유고/돌발 정보 제공Simple Map(LOC)
67.임베디드SW
전기 에너지를 가지고 자동차에서 작동되는 모든 일련의 장치스위치, 휴즈, 릴레이, 모터, 액추에이터 등 장치 포함일반 내연기관 :12V, xEV(HEV, PHEV, BEV, FCEV): 배터리 2개씩 장착저전압 배터리(12V, 충전가능 2차전지), 고전압 배터리(300