🔹설명
only lidar 데이터(bag)만 가지고 딸깍(심지어 설치부터 pip로 설치하고, 명령어도 한줄이면 됨) 하면 pcd(bin) 맵을 만들어주는 레전드 slam 기법.
✅설치 및 실행
- 설치
pip install kiss-slam- 실행
kiss_slam_pipeline [파일 이름.bag]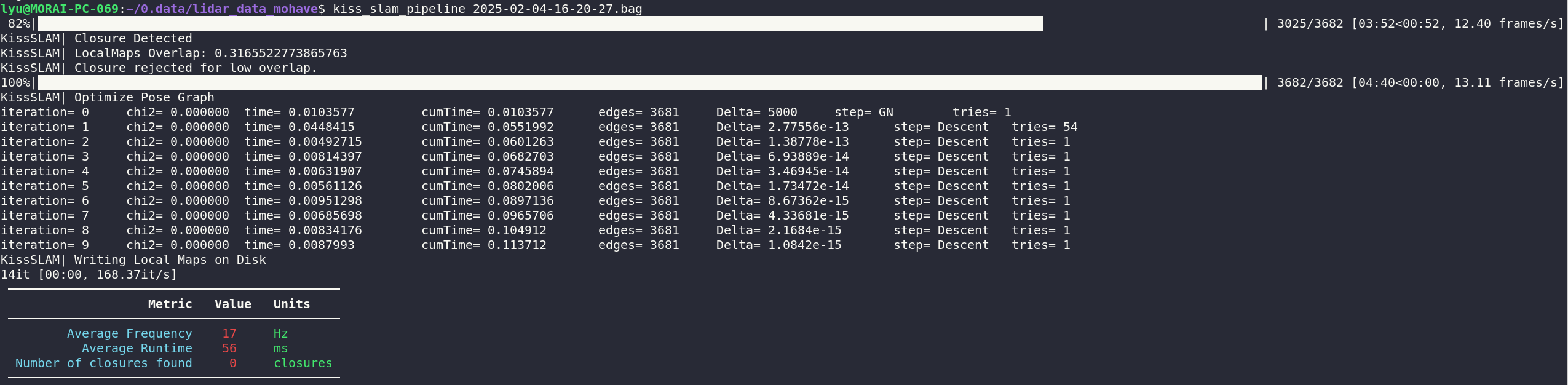
✔️입력 파일
⭕결과
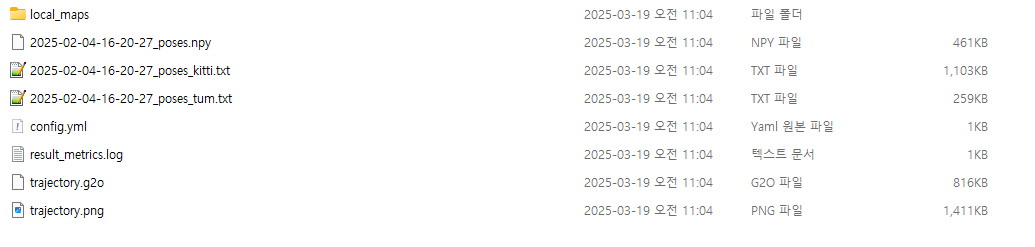
1. raw data
- 전체 파일
- local maps 안의 ply 파일
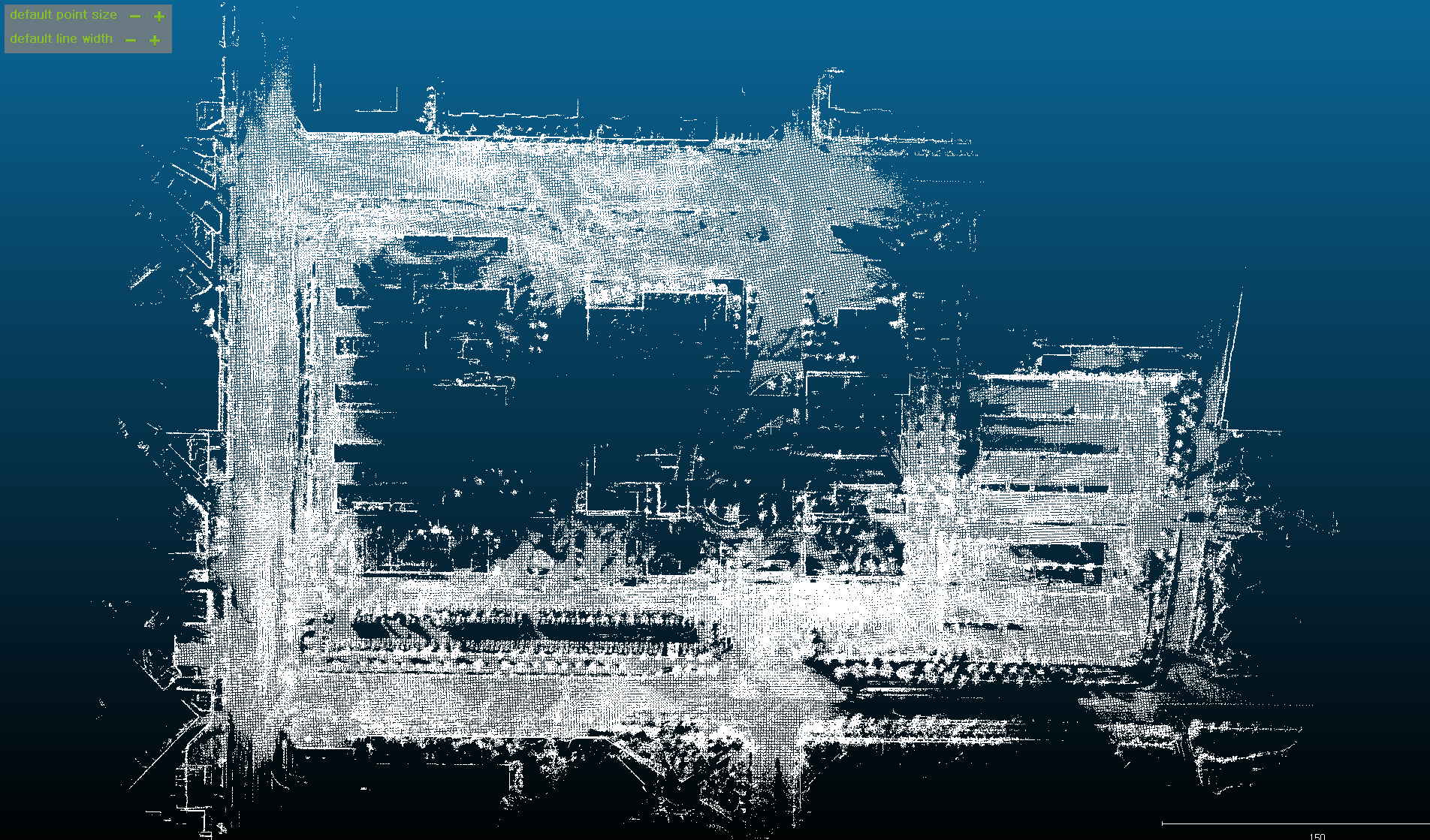
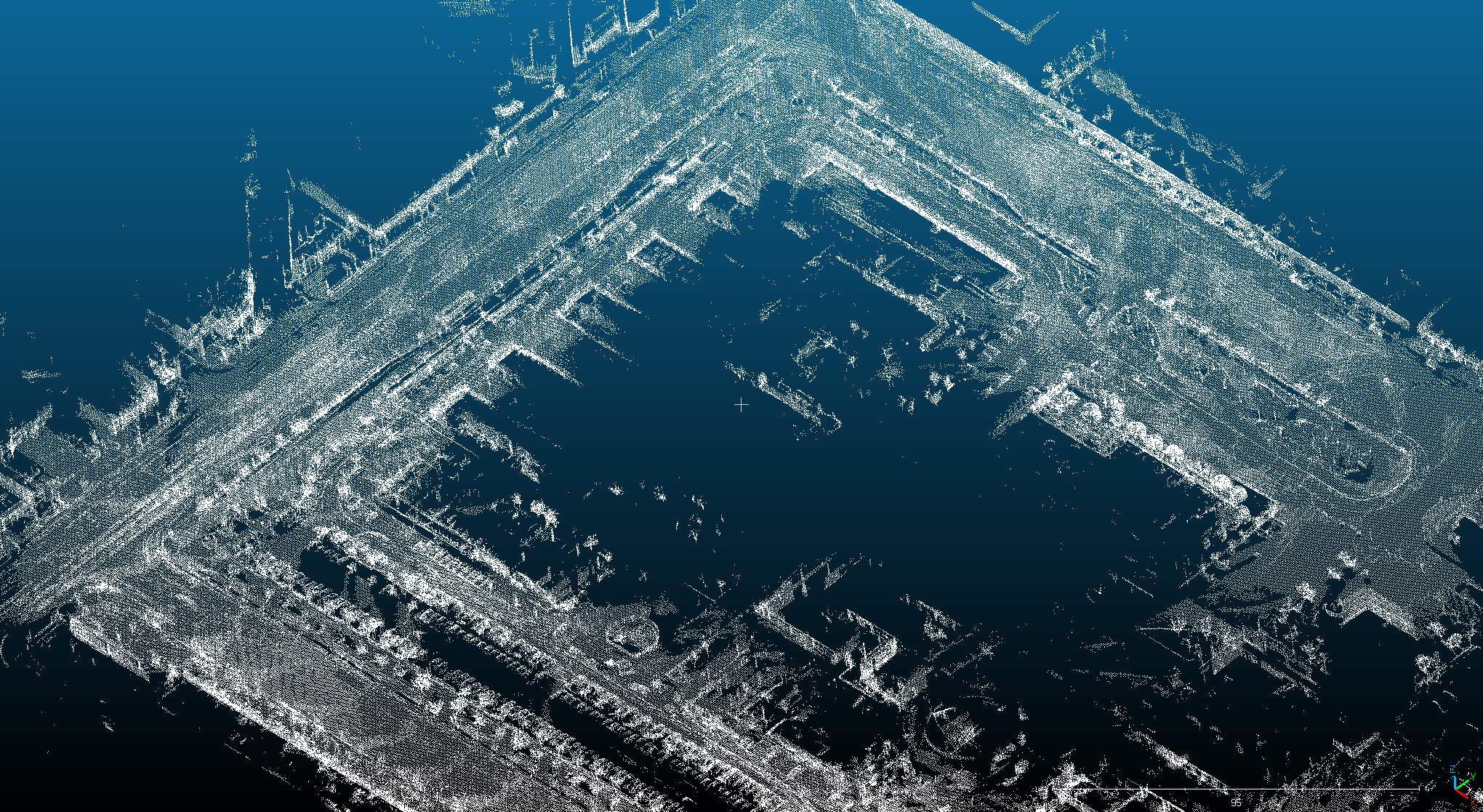
⭕결과 이미지
1. raw data(top view)
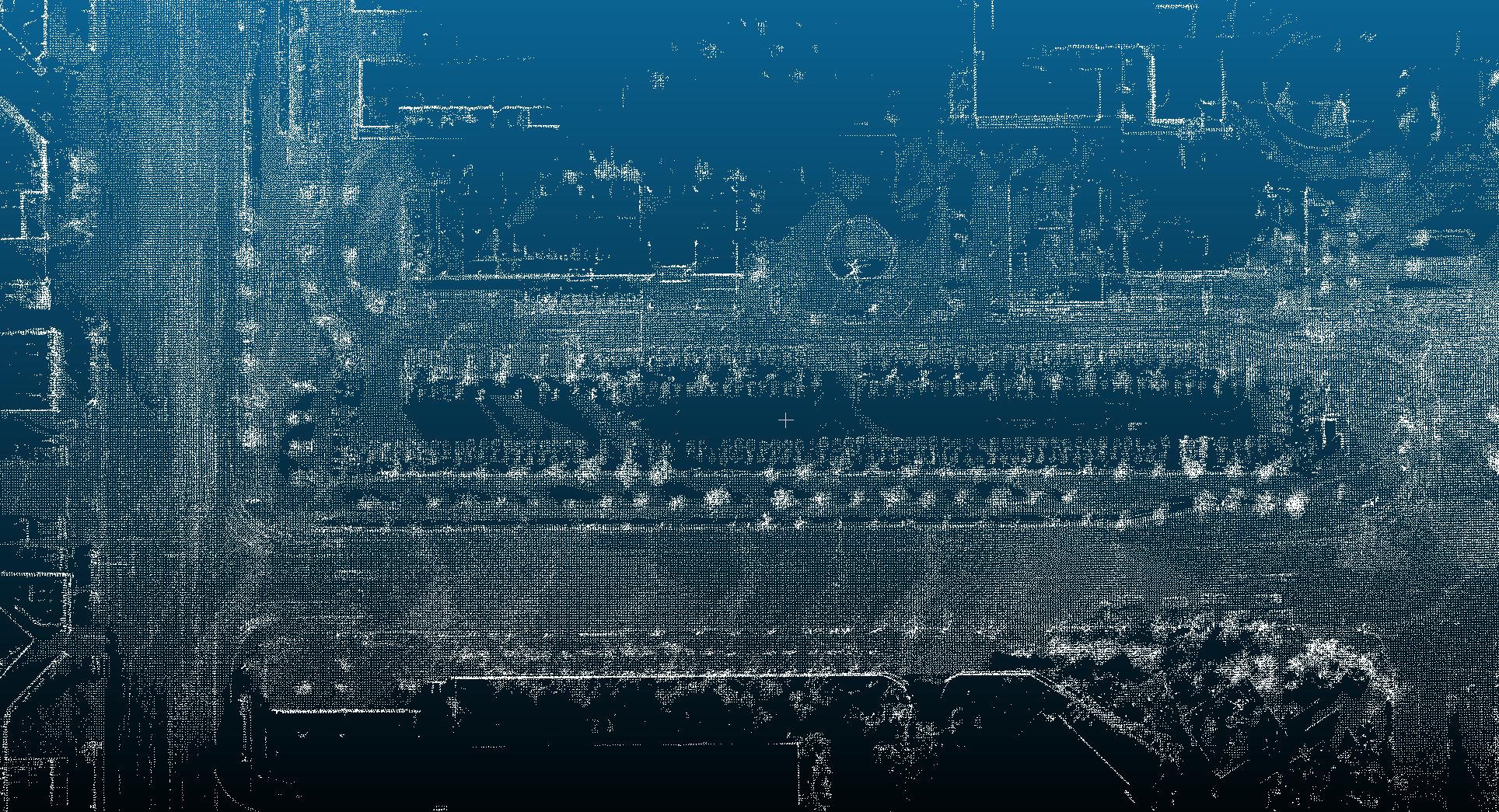
2. raw data + real image(top view)

❌오류

오류 발생시,
python3 -m pip install --upgrade pip그리고
sudo pip3 install open3d==0.13.0
자율주행에 관심이 있으며, Lidar SLAM을 공부하고 있습니다.