Camera
1.Using USB Camera(Webcam) in Ubuntu

Ubuntu 환경에서 특히, 토픽을 받기 위해 ROS에서 Webcam을 사용할 경우, 구동시키는 인터페이스를 설치하고, 실행할 필요가 있다. 본 포스팅은 Logitech사의 웹캠을 ROS로 구동하여 토픽으로 받는 환경을 구축한다.pc 환경 : Ubuntu 18.04,
2022년 6월 7일
2.darknet_ros(Yolo-v3-tiny & Yolo-v4)

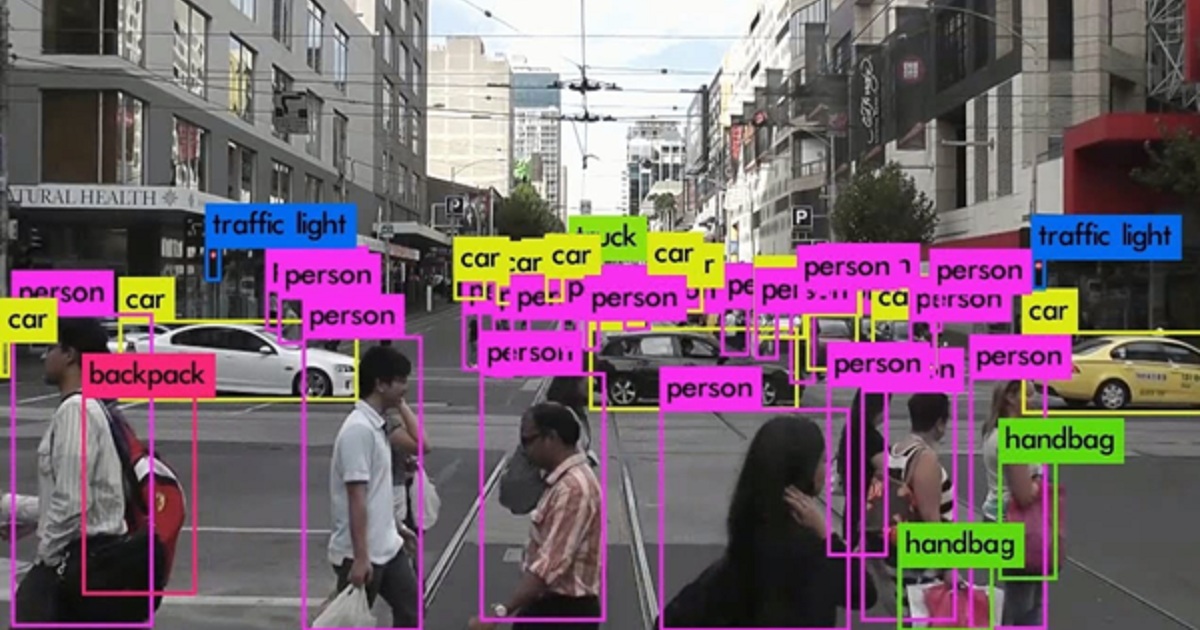
이 포스팅은 ROS에서 darknet을 간단하게 사용 가능하도록 지원하는 오픈소스 darknet_ros를 통하여 Yolo를 사용하는 방법을 설명한다. 특히 yolov3-tiny weight 버전을 ROS로 구동하도록 하겠다. 다음에 기회가 된다면 Yolov4-tiny
2022년 6월 7일
3.리눅스 환경에서 로지텍 웹캠 오토포커스 끄기

본 포스팅은 리눅스 환경의 Ubuntu 18.04에서 로지텍 웹캠의 캘리브레이션을 위한 오토포커스를 끄는 방법을 설명한다.PC 환경OS : Ubuntu 18.04CAM : Logitech streaming webcam텍스트 창이 뜨면, 아래 내용을 입력한다.
2023년 1월 6일
4.카메라 캘리브레이션 및 YOLO를 이용한 거리 검출 (작성중)
본 포스팅은 카메라(웹캠)을 사용해서 캘리브레이션, 라벨링, 거리 추정까지 진행한다. > Window 환경 PC : Desktop OS : Window 10 CPU : I7-8700 GPU : GTX 1660TI CUDA : 11.7 ver. Memory : 32GB
2023년 1월 6일