
Ubuntu 환경에서 특히, 토픽을 받기 위해 ROS에서 Webcam을 사용할 경우, 구동시키는 인터페이스를 설치하고, 실행할 필요가 있다.
본 포스팅은 Logitech사의 웹캠을 ROS로 구동하여 토픽으로 받는 환경을 구축한다.
pc 환경 : Ubuntu 18.04, ROS1 Melodic
Camera : Logitech Stream Cam
카메라는 일반적인 USB 장치와 달리 video device로 바로 잡히기 때문에 다른 명령어를 써서 확인해야 한다.
$ ls -ltr /dev/video*
이와 같이 video가 출력 된다면, 카메라가 정상적으로 연결된 상태이다.
1. 설치
인터페이스 패키지는 Bosch에서 제공하는 표준 USB 카메라 인터페이스 패키지인 usb_cam을 이용했다. usb_cam 패키지의 usb_cam 노드는 이미지 정보를 sensor_msgs::image 타입으로 publish한다.
우선 패키지를 본인의 워크스페이스의 src 디렉토리 아래에 다운로드 한다.
패키지 주소는 아래와 같다.
https://github.com/bosch-ros-pkg/usb_cam
$ cd (본인_ws)/src
$ git clone https://github.com/bosch-ros-pkg/usb_cam
$ cd .. && catkin_make
$ source devel/setup.bash2. 실행
$ roslaunch usb_cam usb_cam-test.launch 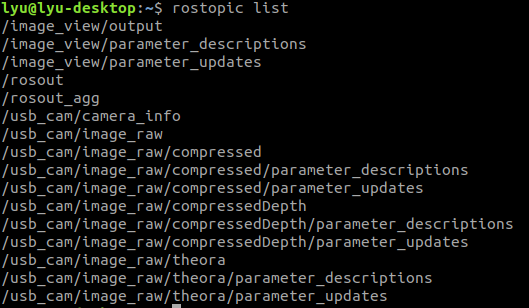
여기서 /usb_cam/image_raw/compressed가 발행되는 이미지 토픽이다.
3. [번외] 오토포커스 끄기

자율주행에 관심이 있으며, Lidar SLAM을 공부하고 있습니다.