논문링크: 링크텍스트
코드 링크: 링크텍스트
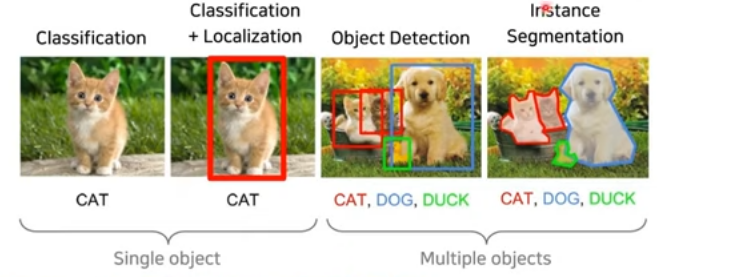
사물인식 경우
-
Classification
-
Classification +Localization
-
Object Detection : 다중 사물에서 각 사물의 위치와 클래스 찾기
-
2-stage
- 물체의 위치를 찾는 문제(localization)
- 물체의 분류 문제를 순차적으로 해결

-
예시
-
1-stage
- 물체의 위치를 찾는 문제와 분류 문제를 한 번에 해결
- 정확도는 낮지만 속도는 빠름, 주로 YOLO에서 쓰인다

-
-
Instance Segmentation
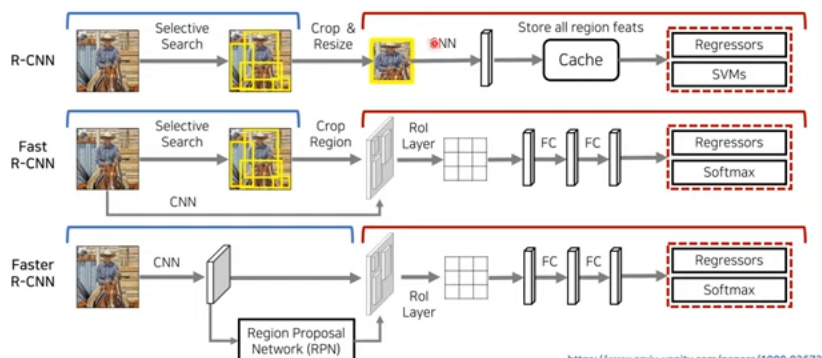
R-CNN계열
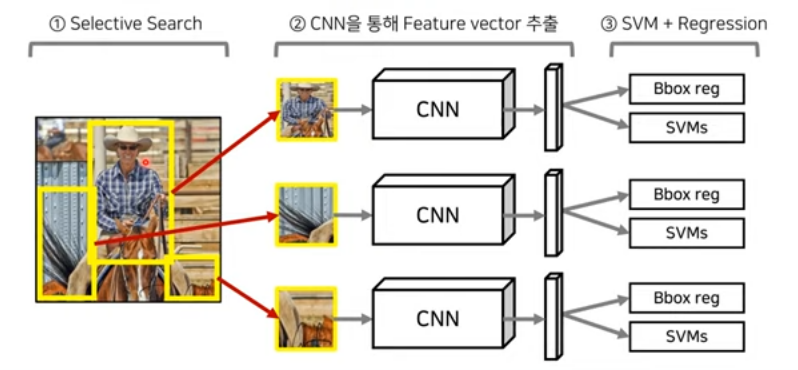
R-CNN
-
Selective Search를 이용해 2000개의 Region Proposal 생성
- 각 Region Proposal을 일일이 CNN에 넣어서 forward결과 계산
-
동작과정
-
Selective search이용하여 2000개의 RoI추출
-
각 ROI에 대해 warping수행하여 동일 크기의 입력 이미지 변경
-
Warped image를 CNN에 넣은 후 (forward)이미지 feature추출
-
해당 feature를 SVM에 넣어 클래스 분류 결과 얻기
- 각 클래스에 대해 독립적 이진 SVM사용
-
해당 feature를 regressor에 넣어 위치 예측
-
-
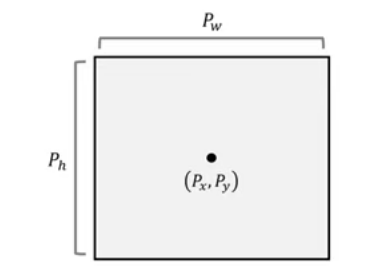
Bounding Box Regression
-
지역화 성능 높이기 위해 사용
-
학습 데이터셋: {(P^i, G^i)}
-
예측 위치: P^i = (Px^i,Py^i,Pw^i,Ph^i)
-
실제 위치: G^i = (Gx^i,Gy^i,Gw^i,Gh^i)
-

-
장점: CNN이용하여 각 Region의 클래스 분류
-
단점
-
전체 프레임워크를 End to End 방식으로 학습이 불가(CNN이 고정되어 SVM과 Bounding Box Regression결과로 업데이트 X)하여 Global Optimal Solution찾기 어려움
-
CPU기반의 Selective Search를 진행해야하므로 많은 시간이 소요됨
-
SVM, Regressor모듈의 CNN과 분리됨
-
모든 RoI를 CNN에 넣어야하므로 2000번의 CNN연산 필요(->학습과 평과 과정의 많은 시간이 필요하다)
-
Fast R-CNN
- 동일 Region proposal을 이용하되 이미지를 한 번만 CNN 넣어 Feature Map생성

-
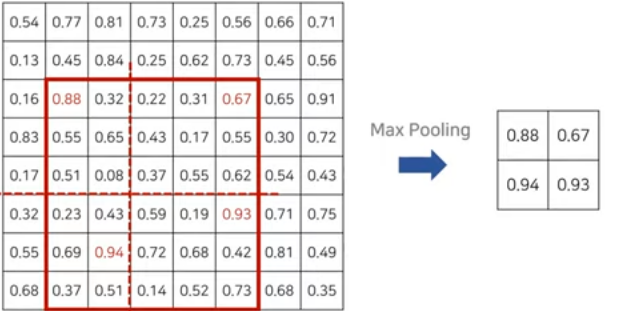
RoI Pooling Layer
- 정의: 각 영역에 대해 max pooling 이용하여 고정된 크기의 벡터 생성
- 정의: 각 영역에 대해 max pooling 이용하여 고정된 크기의 벡터 생성
-
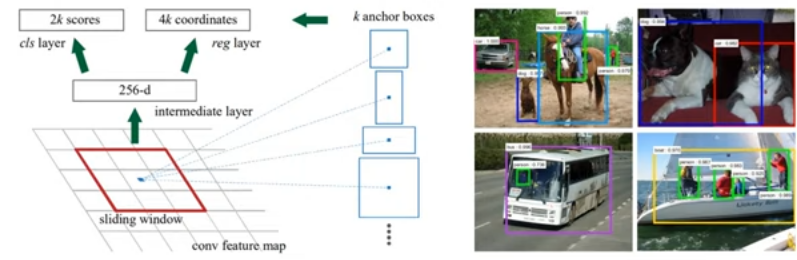
RPN
- 정의: feature map를 통해 물체가 있을 법한 위치 예측
- k개의 anchor box이용
- sliding window -> 각 위치의 Regression과 Classification수행
-
장점: End to End로 학습이 가능하다.(Feture Extraction, Rol Polling, Region Classification, Bounding Box Regression단계)
-
단점: CPU수행 속도가 느리다
Faster R-CNN(RPN Networks)
- 병목(bottleneck)에 해당하는 Region Proposal작업을 GPU장치에서 수행하므로 End to End 학습 가능

-
장점: RPN 제안하여 전체 프레임워크를 End to End학습 가능
-
단점: 많은 컴포넌트로 구성이 되고, Region Classification 단계에서 각 특징 벡터(feature vector)가 개별적 FC Layer로 Forward가 됩니다.
Objection
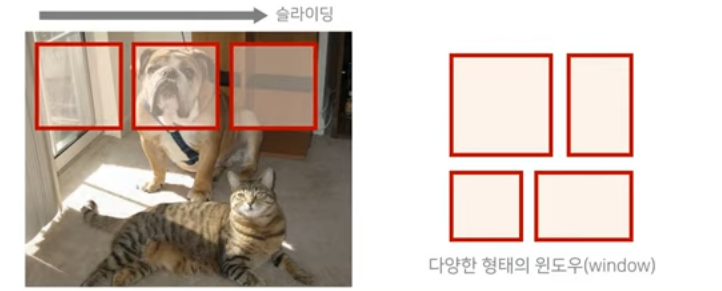
Region Proposal : Sliding Window
-
정의: 물체가 있을 법한 위치를 다양한 형태의 윈도우를 통해서 슬라이딩합니다.
-
단점: 너무 많은 영역을 해야함
Region Proposal : Selective Search
- 인접 영역의 유사성을 측정하여 큰 영역을 차례대로 통합

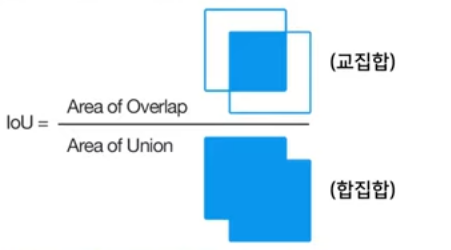
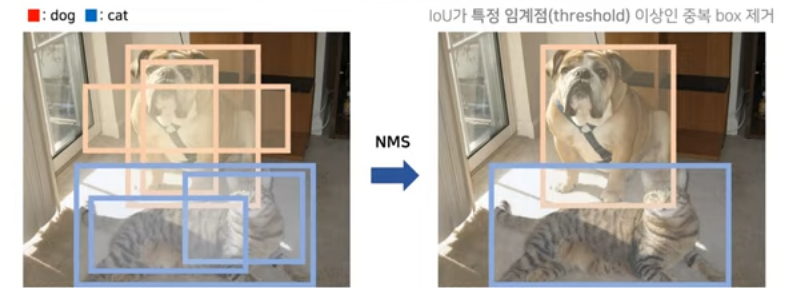
Intersection over Union(IoU)
-
두 바운딩 박스가 겹치는 비율 의미
-
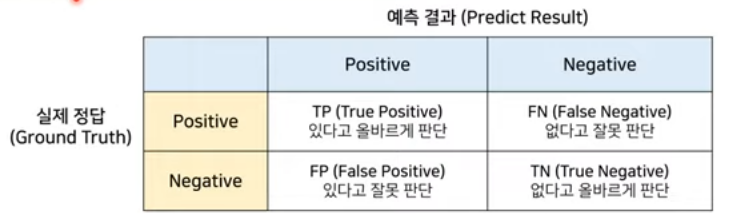
True Positive 인지 False Positive인지 판단하는 기준
-
성능 평가 예시: mAP@0.5는 정답과 예측의 IoU가 50% 이상일 때 정답 판단
-
NMS 계산 예시: 클래스가 같은 것인 IoU가 50%이상일 때 낮은 confidence의 box 제거
- 여러 개의 bounding box가 겹쳐 있는 것을 하나로 합쳐야 하는 것
Precision and Recall
-
Precision
- TP/ (TP+FP)
-
Recall
- TP / (TP+FN)
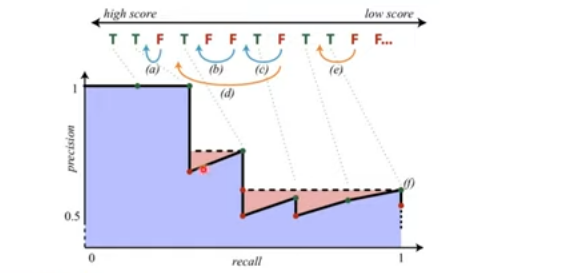
Average Precision
- 정확도와 재현율은 반비례 관계를 가지는 경우가 많아서 Average Precision으로 성능 평가를 주로 한다.(넓이 계산 = 정적분느낌)
-
모든 영역에 대해 전부 사물이 존재한다고 판단한다면..?
- 재현율은 높아지지만 정확도는 감소
-
확실한 때만 사물 존재가 가능하다고 판단을 한다면..?
- 정확도는 높아지지만 재현율은 감소합니다.

깔끔한 정리네요 ㅎㅎ