0. Summary
-
행렬(Matrix)은 수나 다항식을 직사각형 모양으로 배열한 것이다.
-
행렬은 선형대수학에서 식을 간략하게 표현하는 역할을 한다.
-
관련 용어
- identity matrix :
- Inverse : 이면,
- Transpose : 와 에서, 이면, 이다.
- Symmetric matrix : 이면, A는 symmetric하다고 말한다.
-
기본 연산
- 행렬 간 덧셈 : 차원이 같은 두 행렬에서, 같은 위치의 원소끼리 더한다.
- 행렬 간 곱셈 : = 의 i번째 row와 의 j번째 column의 내적(inner product)
- 분배법칙과 결합법칙이 성립한다.
-
주요 특징
- 선형방정식 해 구하기
- A가 invertible 할 때(n*n 행렬) :
- 가 invertible 할 때 :
- 일반적인 경우 : guissian elimination
- inverse 구하기 : 일반적인 선형방적식 구하는 방법에서, 우측을 identity matrix로 둔다.
1. 행렬(Matrix)의 정의
- 행렬이란 수나 다항식을 직사각형 모양으로 배열한 것을 의미한다.
- 사각형의 가로 줄을 row, 세로 줄을 column 이라고 부른다.
- rows, columns 로 구성된 행렬 가 있을 때, 아래와 같이 표현할 수 있다.
- 행렬도 벡터(vector)의 일종으로 볼 수 있다.(행렬 간 덧셈과 스칼라 곱이 가능하다.)
vector의 정의
수학적 관점에서, 아래 2가지 성질을 만족하면 모두 벡터로 볼 수 있다.- 두 벡터를 서로 더할 수 있다.
- 벡터들에 scalar를 곱할 수 있다.
2. 행렬의 필요성
-
행렬은 선형대수학(Linear Algebra)에서 핵심적인 역할을 한다.
-
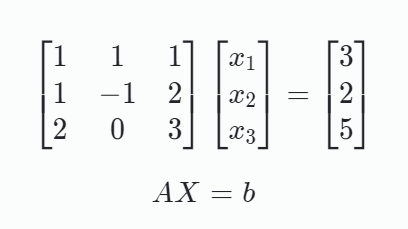
선형방정식(Linear equation)을 간략히 표현하여 복잡한 연산 및 표현을 돕는다.
예를 들어, 아래의 (A) 방정식들을 (B)로 표현할 수 있다.
(A)(B)
-
행렬은 linear function으로 볼 수도 있다.
행렬로 나타낸 를 A 행렬에 input 가 들어가 output 가 나온다고 보는 것이다. -
데이터 표현/저장 용도로도 사용할 수 있다.
-
3. 관련 개념 및 용어
-
Identity matrix
- 다른 행렬에 곱하면, 자기 자신이 나오는 행렬을 identity matrix라고 부른다.
- 대각선은 모두 1이고, 나머지는 모두 0인 행렬이다.
- 다른 행렬에 곱하면, 자기 자신이 나오는 행렬을 identity matrix라고 부른다.
-
Inverse
- 이면, 는 의 역(inverse)이다.
- 의 inverse는 로 표기한다.
- inverse는 일 때만 존재할 수 있다. (column의 수와 row의 수가 같아야 한다.)
- 모든 n*n matrices가 inverse를 갖는 것은 아니다.
✔️ matrix determinant : inverse 존재 여부 판단하기
일 때, 의 determinant는 이다.
만약 이면 는 존재하고, 이면 존재하지 않는다.
- 모든 n*n matrices가 inverse를 갖는 것은 아니다.
- inverse가 존재하면 regular/invertible/nonsingular라고 하고,
inverse가 존재하지 않으면 singular/noninvertible이라고 한다.
-
Transpose
- 와 에서, 이면, 이다.
- 예시)
-
Symmetric matrix
- 이면, A는 symmetric하다고 말한다.
- 와 가 모두 symmetric하면
- 는 symmetric하다.
- 는 symmetric하고 말한 수 없다.
(반례)
4. 기본 연산
- Addition
- 같은 위치의 원소끼리 더하기
일 때,
- 같은 위치의 원소끼리 더하기
-
Multiplication (두 행렬 간의 곱)
- A의 column의 수와 B의 row의 수가 같아야 곱할 수있다.
- 라면,
- : 의 i번째 row와 의 j번째 column의 내적(inner product)이다.
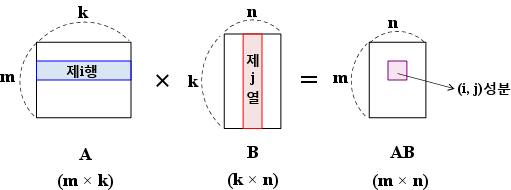
- A의 column의 수와 B의 row의 수가 같아야 곱할 수있다.
-
Associativity
-
Distributivity
5. 주요 특징
6. 선형방정식 해 구하기
- [case 1] A가 invertible (반드시 )
- [case 2] 가 invertible ( 이어도, 은 늘 성립)
- [case 3] general case(앞 두가지 모두 해당 안될 때도 포함)
-
Gaussian Elimination 활용
-
연립 방정식을 특수한 하나의 행렬로 표현한다.
(예시) -
행 간의 곱셈/덧셈을 통해, diagonal(대각선) 부분은 1, diagonal(대각선)의 왼쪽 아래는 0으로 만든다.
(예시) -
다시 다항식으로 바꿔 해를 구한다.
(예시)
-
-
- Inverse 구하기
- 앞의 [case 3]에서와 같이 Gauissian Elimination을 통해 구한다.
- 행렬의 우측에 identity matrix를 적고, 좌측이 identity matrix가 되게 Gaussian Elimination을 수행하면, 우측이 inverse가 된다.
(예시)이면그 결과

기억은 나 대신 컴퓨터가