AUTOSAR
🕛 06.27 (화)
SW Platform
제어계층에서 SW와 HW를 연결해주는 중간 계층 (e.g. OS)
-> 표준 인터페이스 + 공통기능 모듈
SW : AutoLight, Wiper, Room Lamp 등의 기능
HW : MCU, AP ( ‼ 마우스, 키보드, 모니터 => 외부장치: Peripheral )
=> SW 플랫폼은 SW와 HW 사이에서 공통기능모듈, 표준 인터페이스 + Tool 제공
개발 배경
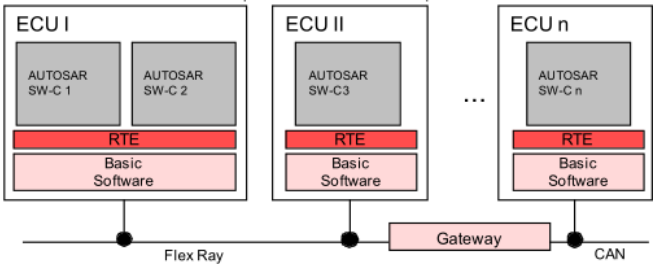
- 제어기 수량의 증가 + 차량 공간의 제약
=> 제어기 통합 필요 - 제어기 SW 복잡성 증가
=> 플랫폼 공용화 및 표준화
e.g) Tesla 社는 Main Controller 3~4개를 통해 차량을 통합제어
HMC의 제어기 SW
- 편의 표준 플랫폼 (XENON '08~)
=> 현대차 표준 플랫폼 (mobilgene '12~)
- Vector社 표준 플랫폼
AUTOSAR란?
AUTOmotive Open System Architecture
"Cooperative on standards, compete on implementation"
www.autosar.org
‼ 14년도 기준
- Core Partner : 조직 및 행정 관리
- 9개 : BMW, BOSCH, DAIMLER, Ford, TOYOTA, GM, VOLKSAGEN, Coninental, PEUGEOT - Premium Partner : Working Group의 선도 및 개선
- 47개 : HONDA, HYUNDAI, VOLVO, RENAULT ... - Development Partner : 전문 지식 기여
- 22개 - Associate Partner : AUTOSAR 표준 사용자
- 93개 - Attendee
- Subscriber
국제 개발 동향
해외 주요 OEM 동향은 AUTOSAR 4.x이 주도적 추세
=> '18 이후로 버전을 연도로 표기 (R20, R21, R22 ...)
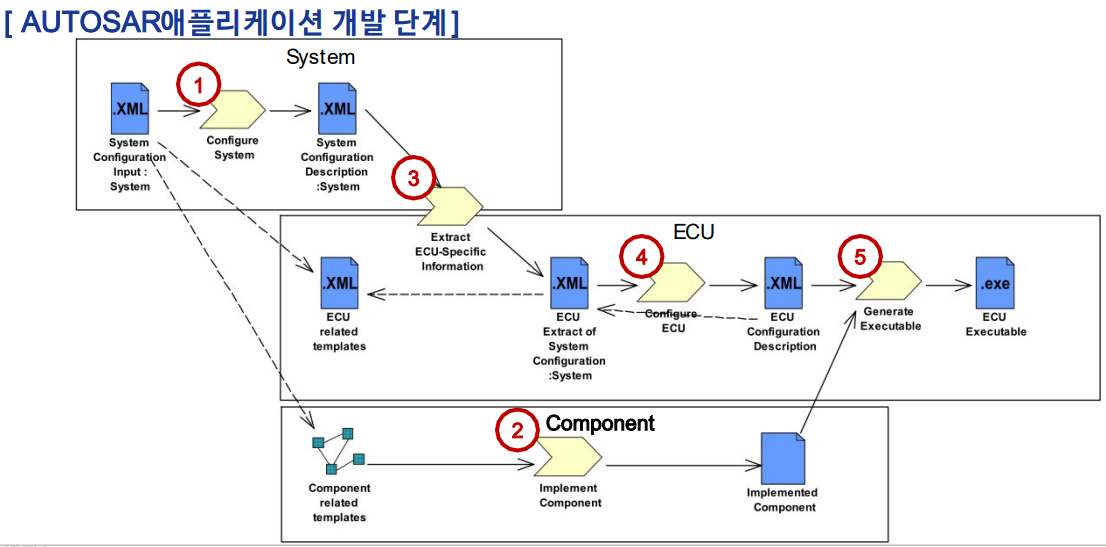
AUTOSAR 개발 과정
AUTOSAR 개발 순서
1) Configure System : 시스템 설정 단계로 컴포넌트의 구성/연결 등을 정의
2) Implement Component : 컴프넌트들에 대한 코드 구현
3) Extract ECU-specific Information : 시스템 구성 정보로부터 특정 제어기 소프트웨어를 구현하기 위한 정보만을 추출
4) Configure ECU : 제어기 관련 설정 (ECU Configuration Description)
5) Generate Executable : 제어기에서 동작하는 실행 파일을 생성 (컴파일 및 링크)
특징
- 일반적으로 Top-Down 방식
- 시스템 설계자는 VFB상에서 SWC를 설계
- SWC 간 Data의 이동은 Port와 Interface로 정의
- Configure System이라는 디자인 단게에서 SWC는 특정 ECU에 할당
- ECU Extract과정을 통해 개별 ECU에 설계 정보 전달
✔ SWC : Software Component, 일반적으로 소프트웨어 기능 단위
✔ VFB : Virtual Functional Bus, 컴포넌트가 상호작용 할 수 있는 통신 메커니즘
✔ RTE : RunTime Environment, SWC 간 또는 SWC와 BSW 간 인터페이스를 설정을 통해 자동 생성
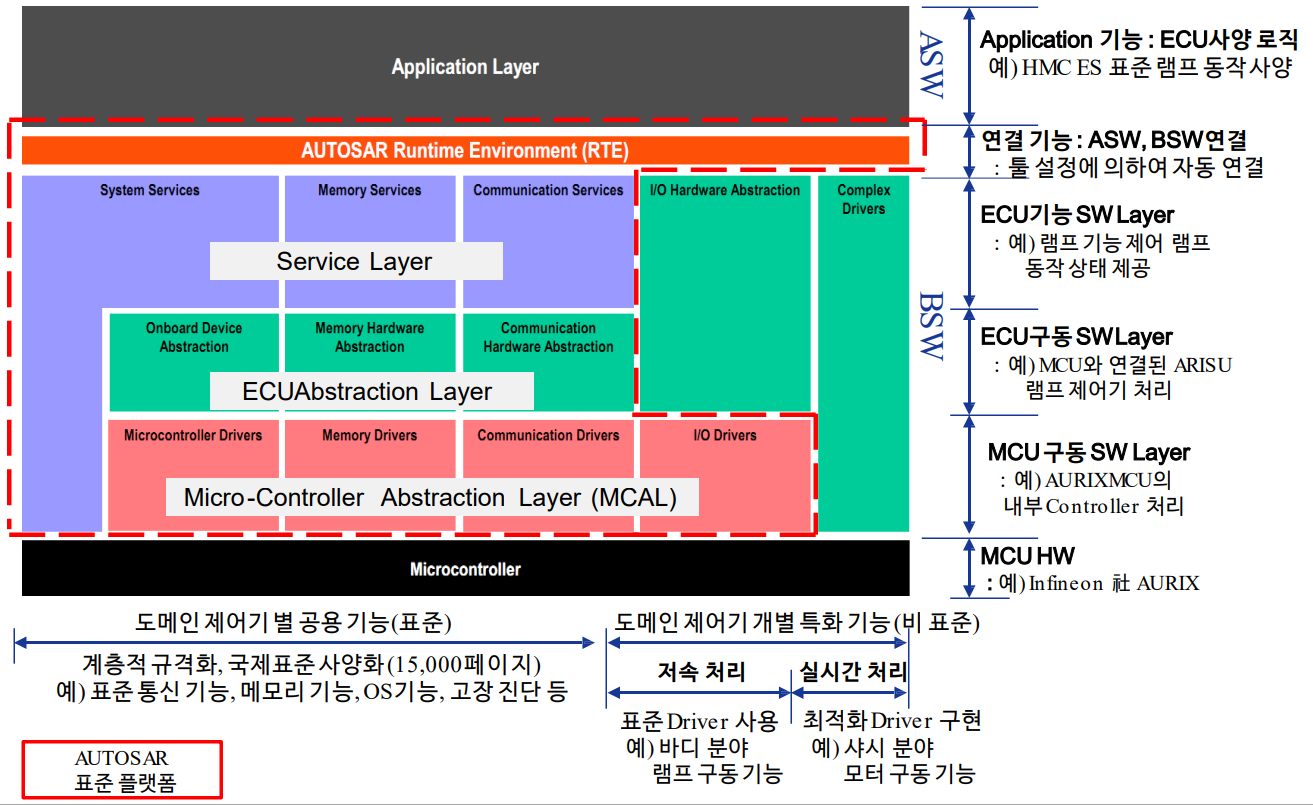
AUTOSAR 구조
- 차량용 SW Application 개발의 생산성 향상을 위한 표준 플랫폼
=> 계층화된 구조 사용으로 업체별 개발 분담 가능 (Application, BSW, MCAL) - AUTOSAR 표준 준수를 통한 안정성 확보
- HW와 독립적인 구조로 SW Application 재사용 가능
=> 각 계층이 추상화!!
=> 단점 : 각 계층이 결과적으로는 함수로 구현되기 때문에, 추가 생성한 계층으로 인한 오버헤드가 발생...!!
=> 실시간성이 필요한 경우 : CDD를 통해 직접적으로(빠르게) HW를 제어
ASW
- HW 독립적인 응용 프로그램 SW를 정의
- SWC의 종류는 기능에 따라 Application, Actuator, Sensor등으로 정의
- SWC 간 통신 및 SWC와 BSW 사이의 통신은 RTE를 이용
RTE
- VFB로 모델화된 통신 구조가 실제 로컬 연결이나 네트워크 통신으로 구현
- ECU에 독립적인 Interface Mapping을 SWC에 제공
- RTE에 정의돈 표준 인터페이스만을 이용해 SWC 개발 가능
AUTOSAR Interface
- AUTOSAR Interface : 사용자 설정에 따라 생성되는 API
- Standardized AUTOSAR Interface : 표준에 정의된 API
- Standardized Interface : 표준 Interface와 BSW 간 Data를 주고 받거나 동작을 실행하기 위한 API
BSW
- Service Layer
- ECU Abstraction Layer
- MCU Abstraction Layer
- Complex Device Driver
AUTOSAR의 장점
- SW Reusability
- 높은 재사용성을 통한 비용 절감- SWC 사이의 안정적인 연결 제공
- 표준화된 플랫폼 사용으로 HW가 변경되어도 기존 SW 재사용 가능 (HW 독립성)
- SW Safety
- 안전이 검증된 SW의 재사용 가능
- 표준화된 프로세스에 의한 SW 개발로 인한 안전성 증대 - Cost Efficiency
- OEM 측면
- SW 재사용 및 신차 모델 개발 기간 단축으로 원가 절감
- OEM의 설계 요구사항을 담고 있는 ARXML을 통한 명확한 커뮤니케이션 가능
- 다양한 부품사에서 기능을 제공받아 통합 가능
- Vendor(Supplier) 측면
- 다양한 OEM에 공급 가능
- OEM 측면
