로봇소프트웨어개발기사
- 출처 : 로봇소프트웨어개발기사 출제기준 (Q-net)
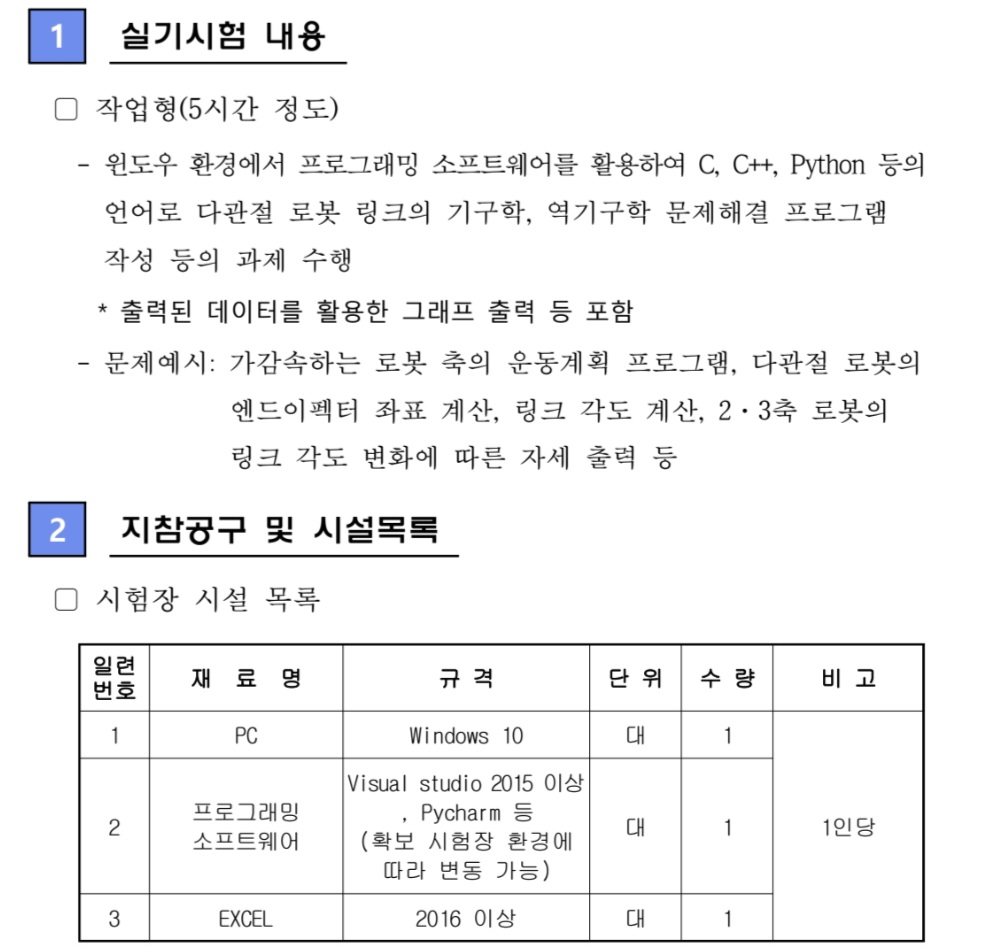
- 검정방법 : 작업형
- 시험시간 : 5시간 정도 (?)
- 수행준거
- 주어진 목적지에 도달하기 위하여 경로, 궤적을 계획하고 충돌 회피 소프트웨어를 개발할 수 있다.
- 로봇작업수행을 위해 작업 요구사항을 파악하고 설계, 구현할 수 있다.
- 목적지까지의 로봇 이동을 위해 환경지도의 작성, 로봇위치의 맵핑, 그리고 경로를 계획하고 구현할 수 있다.
- 물체, 사람, 환경을 인지하기 위해 알고리즘을 설계하고, HRI 지능 소프트웨어를 개발할 수 있다.
- 로봇 하드웨어 상태를 모니터링하고 조정하는 프로그램을 통해 효율적으로 활용하기 위한 프로그램을 설계, 작성, 수정하며 훈련하는 프로그램을 개발할 수 있다.
- 로봇 어플리케이션 개발자가 로봇의 다양한 센서, 액추에이터, 공통기능 요소들을 사용하기 쉽게 추상화하여 API로 제공하고 이들을 운용 관리할 수 있는 로봇 미들웨어를 개발할 수 있다.
- 여러 대의 로봇 및 서버가 연동하여 동작할 때 이를 일괄적으로 모니터링하고 원활하게 동작할 수 있도록 하는 프로그램을 개발할 수 있다.
경로계획 소프트웨어 개발
경로 계획하기
- 요구사양서에 의한 로봇 성능으로부터 경로계획 성능사양을 도출할 수 있다
- 로봇의 운동학적 해석을 통해 경로계획 알고리즘을 도출할 수 있다
- 경로계획 알고리즘에 기반하여 성능사양을 만족하는 경로계획 소프트웨어를 설계할 수 있다.
- 로봇모션제어 시뮬레이션 소프트웨어를 이용하여 경로계획 로직이 적절하게 구현되었는지 평가할 수 있다.
궤적 계획하기
- 로봇 기구학 및 역기구학 해석을 할 수 있다.
- 로봇 경로계획 및 보간 등 로봇 모션제어 소프트웨어 구조를 파악할 수 있다.
- 로봇 기구학 및 역기구학 시뮬레이션을 이용하여, 모션제어로직이 적절하게 구현되었는지 평가할 수 있다.
- 로봇의 기구학 요구사항을 역기구학 소프트웨어가 만족하는지 여부를 분석할 수 있다.
충돌회피경로 계획하기
- 로봇 충돌회피 소프트웨어 설계를 위한 요구사항과 계획을 작성할 수 있다.
- 로봇 충돌회피 소프트웨어 설계를 위한 경로계획 및 모션제어 구조를 파악할 수 있다.
- 로봇 충돌회피 알고리즘을 도출할 수 있다.
- 도출한 알고리즘을 기반으로 한 충돌회피 소프트웨어를 설계할 수 있다.
- 로봇 충돌회피 성능시험 소프트웨어를 이용하여 로봇 충돌회피 소프트웨어가 적절하게 개발되었는지 평가할 수 있다.
작업지능 소프트웨어 개발
작업 요구사항 파악하기
- 로봇 작업을 수행하기 위한 작업요구사항을 분석할 수 있다.
- 작업을 성공적으로 수행하기 위하여 로봇 성능 스펙을 도출할 수 있다.
- 도출 된 결과에 따라 로봇 작업지능 소프트웨어의 목표사양을 선정할 수 있다.
작업 수행 지능 설계하기
- 소프트웨어의 목표사양을 만족하는 작업지능을 분석할 수 있다.
- 로봇과 주변장치 인터페이스를 분석할 수 있다.
- 분석된 결과에 따라 알고리즘을 도출할 수 있다.
- 로봇작업지능 알고리즘을 기반으로 한 프로그램을 작성할 수 있다.
이동지능 소프트웨어 개발
지도 작성 및 위치 인식하기
- 작업환경을 표현하는 여러 지도의 특징에 대해 알고있다.
- 각 지도를 적합한 데이터 구조로 프로그래밍 할 수 있다.
- 지도 내에서 로봇 위치를 인식할 수 있다.
- 지역적 로봇 위치 계산 오차를 보정할 수 있다.
이동 경로계획 구현하기
- 전역적인 로봇이동 경로를 생성할 수 있다.
- 지역적인 로봇이동 경로를 생성할 수 있다.
인공지능 소프트웨어 개발
인지알고리즘 설계하기
- 사용자요구분석 결과에 따라 물체, 사람, 환경을 인지하기 위해 필요한 로봇 인지지능 소
프트웨어의 목표사양을 선정할 수 있다. - 소프트웨어의 목표사양을 만족하는 인지지능 분석 및 프로그램 구조를 설계할 수 있다.
- 로봇 인지지능을 구현하는 알고리즘을 도출할 수 있다.
- 로봇 인지지능 알고리즘을 기반으로 한 프로그램을 작성할 수 있다.
HRI 지능 소프트웨어 개발하기
- 사용자 요구사양 분석 결과에 따라 로봇이 사람과 상호작용을 하기 위해 필요한 HRI 지능 소프트웨어의 목표사양을 선정할 수 있다.
- 소프트웨어의 목표 사양을 만족하는 HRI 지능 분석 및 프로그램 구조를 설계할 수 있다.
- HRI 지능 알고리즘을 기반으로 한 프로그램을 작성할 수 있다.
로봇 운영 소프트웨어 개발
모니터링 툴 개발하기
- 여러가지 종류의 로봇 컨트롤러 특성을 이해하고 제어할 수 있다.
- 여러 대의 로봇이 동시에 연동하여 움직일 때 발생할 수 있는 문제점을 예측하여 제어하는 프로그램을 구현할 수 있다.
- 로봇의 상태를 쉽게 파악할 수 있는 모니터링 프로그램을 작성할 수 있다.
- 모니터링 프로그램을 설치하고 배포할 수 있다.
서버 연동 소프트웨어 개발하기
- 여러 대의 로봇을 통제하는 서버의 특성을 파악하고 프로그램을 설계할 수 있다.
- 서버와 로봇, 로봇과 로봇을 동기화하여 연동하는 프로그램을 설계할 수 있다.
- 로봇에 고유코드를 부여하고 구별하여 운용할 수 있다.
- 로봇을 서버에 등록하고 정보를 수정 및 삭제할 수 있는 프로그램을 작성할 수 있다.
- 로봇의 로그인 정보를 관리하고 배포할 수 있는 프로그램을 작성할 수 있다.
외부 툴과의 동기화 소프트웨어 개발하기
- 로봇을 조정하는데 사용되는 툴의 종류 및 조정방법에 맞게 프로그램을 설계할 수 있다.
- 로봇과 조정 툴이 동시에 동일한 정보 버전으로 동작할 수 있도록 동기화 프로그램을 할 수 있다.
- 근거리 또는 원격지 유무선 조정에서 통신 및 전파의 특성을 고려하여 동기화 프로그램을 할 수 있다.
- 조정툴이 정상적으로 운영되는지 시험 및 테스트할 수 있다.
로봇 응용 소프트웨어 개발하기
- 로봇을 이용한 다양한 기능을 구현할 수 있는 프로그램을 설계할 수 있다.
- 로봇이 웹, 앱 등의 프로그램과 연계하여 운영될 수 있도록 프로그램할 수 있다.
- 로봇과 함께 활용되는 주변장치의 성능을 활용하는 프로그램을 구현할 수 있다.
- 프로그램을 설치하고 배포할 수 있다.
로봇 훈련 소프트웨어 개발하기
- 로봇의 학습절차를 설정하고 학습 프로그램을 설계할 수 있다.
- 인공지능 프로그램의 구조를 파악하고 프로그램할 수 있다.
- 로봇 훈련에 필요한 데이터를 수집, 활용하는 절차를 이해하고 프로그램 할 수 있다.
- 데이터베이스를 구축하고 활용하는 프로그램을 할 수 있다.
로봇 미들웨어 개발
로봇 미들웨어 사양 분석하기
- 로봇 요구사항에 따르는 소프트웨어 운영체제가 제공하는 서비스를 분석할 수 있다.
- 로봇 요구사항에 따르는 하드웨어를 구동하기 위한 통신 프로토콜을 분석할 수 있다.
- 로봇 요구사항에 따르는 로봇 소프트웨어를 분류하고 공통 요소들을 도출할 수 있다.
- 소프트웨어 공통 요소 및 응용 프로그램 간 상호 정보 교환 및 프로세스 관리를 위한 미들웨어 구조 사양을 도출할 수 있다.
로봇 미들웨어 설계하기
- 로봇 요구사항에 따르는 하드웨어를 구동하기 위한 통신 프로토콜을 설계할 수 있다.
- 로봇 요구사항에 따르는 로봇 소프트웨어 공통 요소들을 호출하는 구조를 설계할 수 있다.
- 소프트웨어 공통 요소 및 응용 프로그램들 간 상호 정보 교환 및 프로세스 관리를 위한 미들웨어 구조를 설계할 수 있다.
로봇 미들웨어 구현하기
- 로봇 요구사항에 따르는 하드웨어 통신 프로토콜 프로그램을 작성할 수 있다.
- 로봇 요구사항에 따르는 로봇 소프트웨어 공통 요소 호출 구조를 API로 작성할 수 있다.
- 소프트웨어 공통 요소 및 응용 프로그램들 간 상호 정보 교환 및 프로세스 관리를 이ㅜ한 미들웨어 프로그램을 작성할 수 있다.
- 특정 요구 기능과 독립하여 소프트웨어 공통 요소 및 응용 프로그램의 예시 프로그램을 작성하여 상호 정보 교환 및 프로세스 관리의 동작을 확인할 수 있다.
📌 NCS 공부 자료
전기·전자 > 03.전자기기개발 > 08.로봇개발 > 03.로봇소프트웨어개발
https://m.ncs.go.kr/unity/hmn01/hmn0101/ncsResultSearch.do?dutySvcNo=SVC201600802&ncsClCd=1903080314_14v1&ncsLclasCd=19&ncsMclasCd=03&ncsSclasCd=08&ncsSubdCd=03&ncsCompeUnitCd=14&doCompeUnit=false&output=ncsRsnInfo

공부방