임베디드
1.AUTOSAR(Automotive Open System ARchitecture)
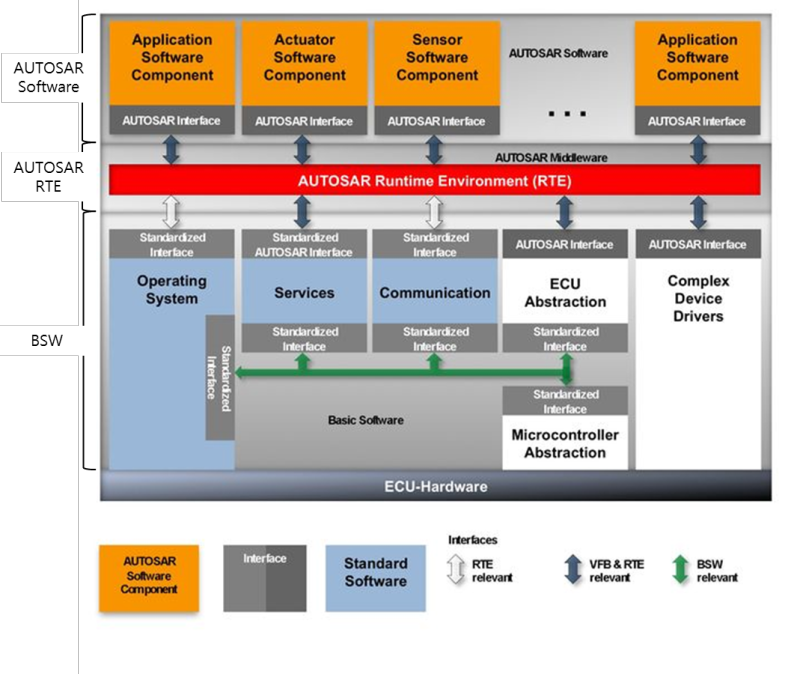
📌 AUTOSAR(AUTomotive Open System ARchitecture)차량 부품을 제어하기 위한 SW의 업계 표준BSW(Basic SW)Service Layer : 가장 상위 계층으로 시스템 구동 및 BSW 내 모듈의 제어System Services :
2.교착상태(Dead Lock)
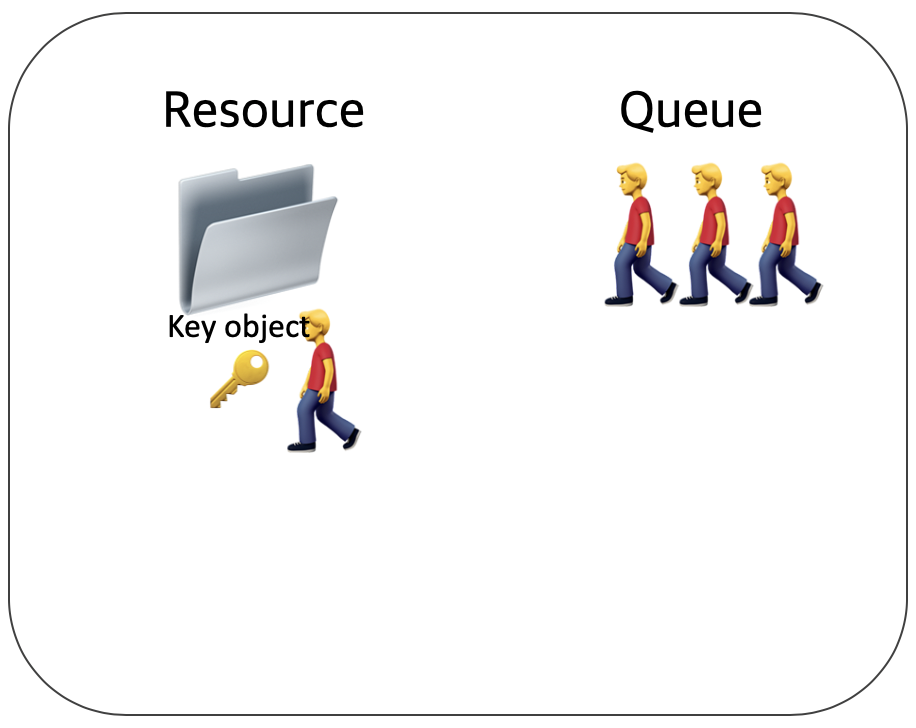
경쟁상태(Race Condition) : Thread / Process의 타이밍에 따라 결과값이 달라질 수 있는 상태임계영역(Critical Section) : Thread / Process가 동시에 접근해서 안되는 곳Critical Section을 동시에 수행하지 않
3.프로세스 & 쓰레드
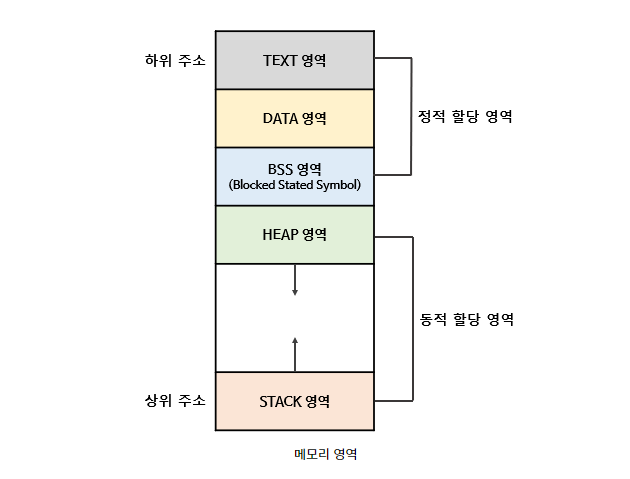
✨Thread는 Process내에서 text, data, heap은 공유하며, stack은 따로 할당각각의 프로세스는 독립적인 메모공간을 가지고 있음프로세스는 동시에 실행되고 관리되는것 처럼 보이지만, 실제로는 한번에 한가지 명렁만 처리=> Firmware 개발 Lev
4.A-SPICE

📌 A-SPICE (Automotive Software Process Improvement and Capability dEtermination) 소프트웨어 프로세스 수행능력 평가를 위한 표준 프레임워크인 ISO/IEC15504의 개발을 지원하기 위해 만들어진 기
5.[리눅스 시스템 네트워크 프로그래밍] 1. 프로세스
"Advanced! 리눅스 시스템 네트워크 프로그래밍"위의 책은 내용의 간소화를 위해 include를 포함하여 코드의 일부를 생략하였다. 따라서 아래 내용은 코드를 실제로 동작하도록 구현해 실행결과를 확인하는 것을 목표로 한다. 또한, 다른 독자들이 편하게 코드를 작성
6.[임베디드기사] 실기 정리
임베디드기사, 2023, 실기
7.[로봇소프트웨어개발기사] 실기 정리
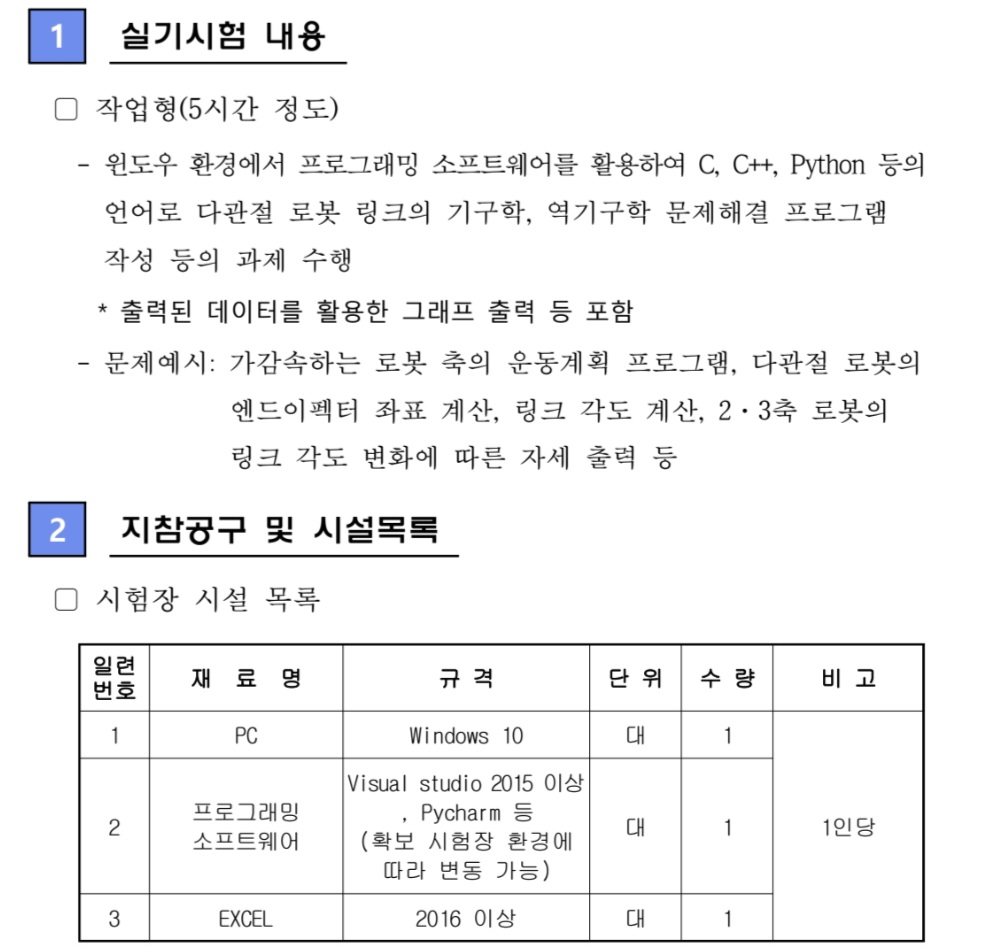
#로봇소프트웨어기사 #2023 #실기
8.[로봇소프트웨어개발기사] 1-1. 경로 계획하기
경로 계획하기 요구사양서에 의한 로봇 성능으로부터 경로계획 성능사양을 도출할 수 있다 로봇의 운동학적 해석을 통해 경로계획 알고리즘을 도출할 수 있다 경로계획 알고리즘에 기반하여 성능사양을 만족하는 경로계획 소프트웨어를 설계할 수 있다. 로봇모션제어 시뮬레이션 소