Project Proposal
도메인
자율 주행을 위한, 교통 표지판 분류.
Data Set
Kaggle의 Traffic Sign Dataset - Classification 데이터셋 소싱
- 57 클래스 학습
- 클래스당 120개의 이미지
- 2000개의 테스트 데이터
| ClassId | Name | ClassId | Name | ClassId | Name |
|---|---|---|---|---|---|
| 0 | Speed limit (5km/h) | 20 | Go straight or right | 40 | Unknown1 |
| 1 | Speed limit (15km/h) | 21 | Go straight | 41 | Unknown2 |
| 2 | Speed limit (30km/h) | 22 | Go Left | 42 | Unknown3 |
| 3 | Speed limit (40km/h) | 23 | Go Left or right | 43 | Go right or straight |
| 4 | Speed limit (50km/h) | 24 | Go Right | 44 | Go left or straight |
| 5 | Speed limit (60km/h) | 25 | keep Left | 45 | Unknown4 |
| 6 | Speed limit (70km/h) | 26 | keep Right | 46 | ZigZag Curve |
| 7 | speed limit (80km/h) | 27 | Roundabout mandatory | 47 | Train Crossing |
| 8 | Dont Go straight or left | 28 | watch out for cars | 48 | Under Construction |
| 9 | Dont Go straight or Right | 29 | Horn | 49 | Unknown5 |
| 10 | Dont Go straight | 30 | Bicycles crossing | 50 | Fences |
| 11 | Dont Go Left | 31 | Uturn | 51 | Heavy Vehicle Accidents |
| 12 | Dont Go Left or Right | 32 | Road Divider | 52 | Unknown6 |
| 13 | Dont Go Right | 33 | Traffic signals | 53 | Give Way |
| 14 | Dont overtake from Left | 34 | Danger Ahead | 54 | No stopping |
| 15 | No Uturn | 35 | Zebra Crossing | 55 | No entry |
| 16 | No Car | 36 | Bicycles crossing | 56 | Unknown7 |
| 17 | No horn | 37 | Children crossing | 57 | Unknown8 |
| 18 | Speed limit (40km/h) | 38 | Dangerous curve to the left | ||
| 19 | Speed limit (50km/h) | 39 | Dangerous curve to the right |
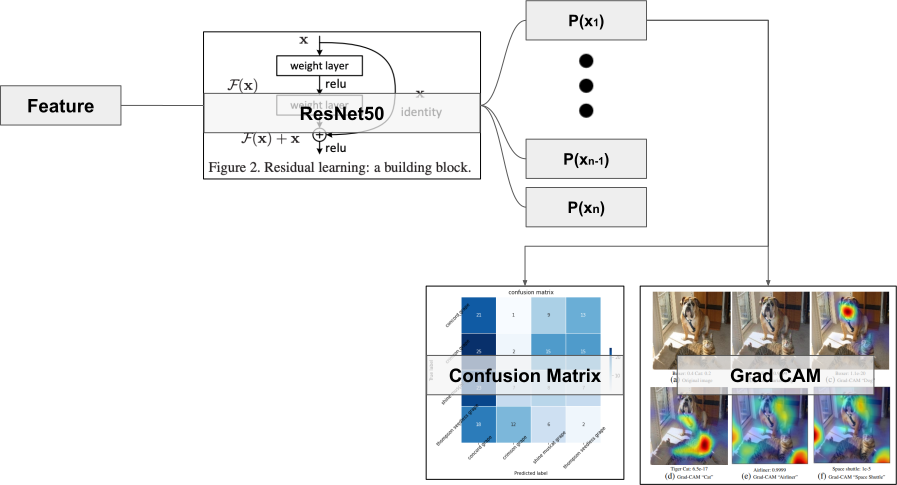
Work Flow and Model for training.
- 개발 환경: Colab
- 사용 모델: CNN의
ResNet50 - 평가 지표:
Confusion Matrix의 F1-Score 측정K겹 교차 검증으로, 모델의 학습 평가.Grad CAM으로 모델이 보는, 입력데이터의 특징 시각화.
Goal
시리즈에서 포스팅한 내용(Machien Learning Theory 및 Deep Learning)을 바탕으로, 도메인 설정 모델 설계 모델 평가 실제 응용 까지 실습
추가로, 성능 평가 및 모델 활용 시 Confusion Matrix와 GradCAM을 활용한다.
다만 개발 환경이, Colab에서 사용되기때문에 학습 시간과 준수한 성능의 GPU 활용이 요구 될수 있기때문에 학습데이터 및 분류 클래스가 줄어들 수 있다.

Greek Yogurt