많은 lock 기법에 대해 알아보자.
Spin Locks

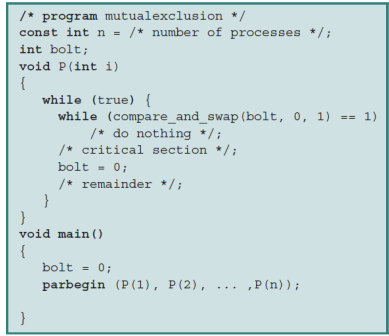
busy waiting, spin waiting 모두 critical section에 들어가기 전에 쓰레드, 프로세스가 아무것도 안 하는 것을 의미한다.
이 기법을 이용한 것이 Spin lock이다.
스핀락의 특징은 다음과 같다.
- 구현과 검증이 간단하다.
- 하나의 쓰레드만 critical section에 접근할 수 있게 한다.
- 쓰레드 수가 몇이던, 싱글 또는 멀티 프로세서 환경이던 다 잘 동작한다.
- Busy waiting 하기 때문에 성능저하가 예상된다.
- 싱글 프로세서 환경에서 성능 저하가 심할 수 있다.
- 멀티 프로세서 환경에선 성능저하가 심하지 않다.
- starvation이 발생할 수 있다.
Semaphore
busy waiting 하지 않는 lock 기법이다. 다양한 상황에 사용된다.
lock 변수 하나가 필요하며, 이는 자원을 몇 개의 쓰레드가 접근가능한지 알려주는 수단이다.
이를 위한 API 이름을 알아보자.
- P(S) == semWait(): critical section에 접근한다. lock
- V(S) == semSignal(): critical section 접근을 끝낸다. unlock
세마포어는 sleep & awake 기법을 사용하며 이는 lock 변수 이외에, 쓰레드를 저장할queue가 필요하다.
Binary semaphore(mutex locks)
상호배제 lock이라고도 불리우는 mutex lock은 critical section에 하나의 쓰레드만 접근할 수 있는 기법이다.
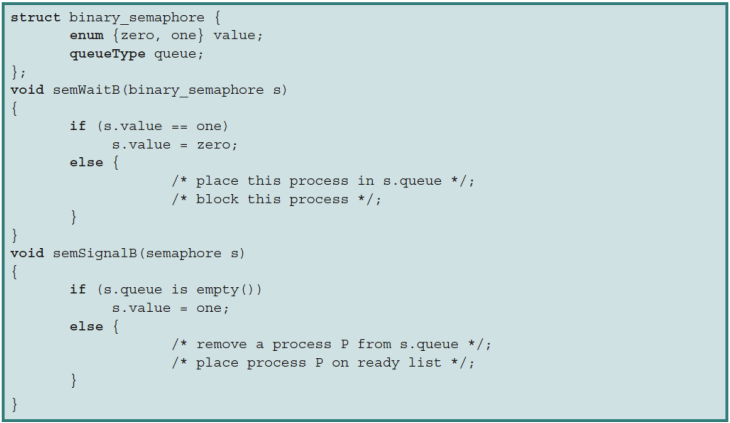
동작 방식은 다음과 같다.
- 첫 쓰레드는 1을 0으로 변경 후 critical section에 접근한다.
- 이후 쓰레드 진입은 전부 queue에 들어가고 block된다.
- 첫 쓰레드가 진입에서 벗어나면 2.에서 block된 쓰레드를 ready 상태로 변경하고 critical section에 진입한다.
- queue가 empty라면 1.을 수행하고, 아니라면 2.를 반복한다.
이는 FIFO와 같이 순서를 보장하기 때문에 Strong semaphore라고 부른다.
Counting semaphore(general semaphore)
좀 더 일반적인 세마포어로, critical section 접근 쓰레드 수에 제한이 걸려있지 않다.
1. 1일 때 0으로 만들고 critical section에 접근한다.
2. 이후 쓰레드는 sleep한다.
3. awake 시, critical section에 접근한다.
4. 이후 count가 0 이하일 경우, (2 3)를 반복하고 0 초과라면 1을 수행한다.
Implementation
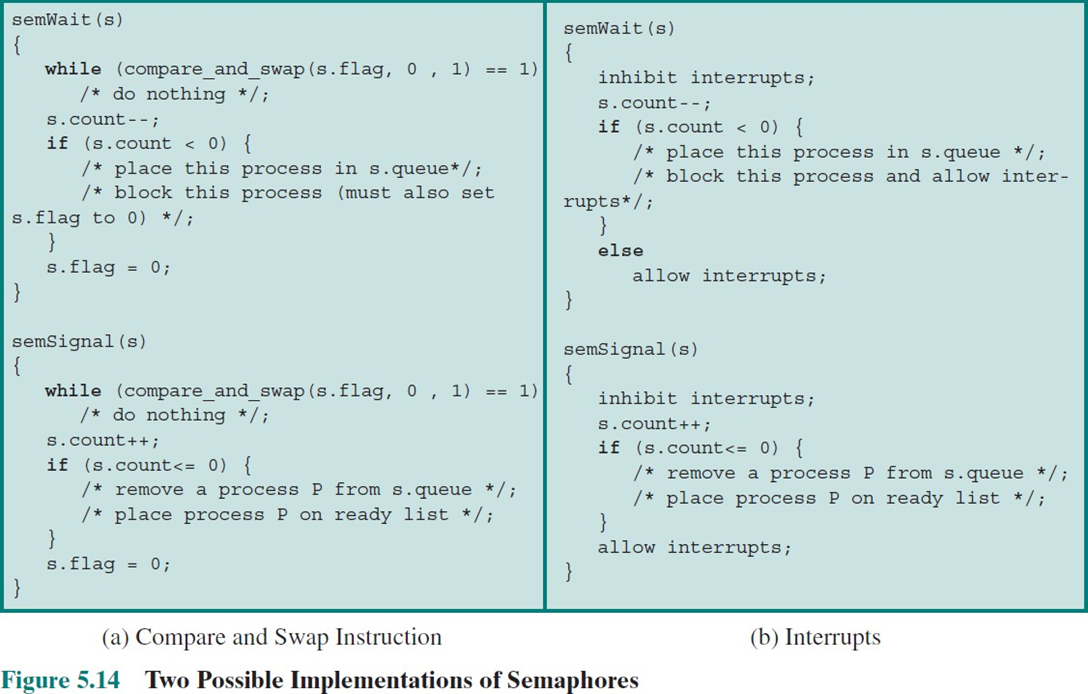
위와 같이 wait, signal 접근 자체가 공유자원인 count와 queue에 접근할 수 있으니 CAS와 같은 spin lock을 이용해야한다.
Deadlocks
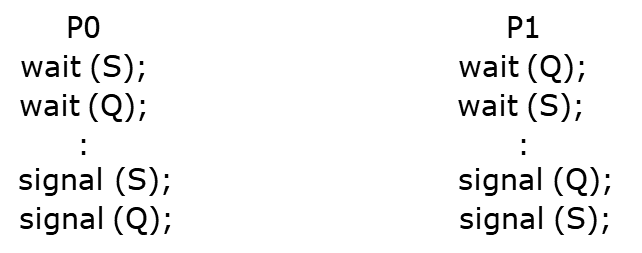
Deadlock이란 다음과 같은 상황에 Scheduling으로 인해 발생한다. 두 쓰레드 모두 sleep 하는 경우이다.
세마포어는 overhead가 더 크다. 프로세스 스위치가 필요하기 때문이다. 그러나 spin lock도 대기하는 시간이 길어질 수 있다. 이러한 이유로, critical section의 수행이 길면, 세마포어, 짧으면 spin lock을 선택하듯이 상황에 맞게 선택하면 된다.
Linux: Two-Phase Locks
리눅스에선 동기화 기법으로 두 가지 phase가 존재한다.
- first phase: spin lock으로 조금만 기다린다.
- second phase: spin lock이 길어지면 sleep 한다.
APIs
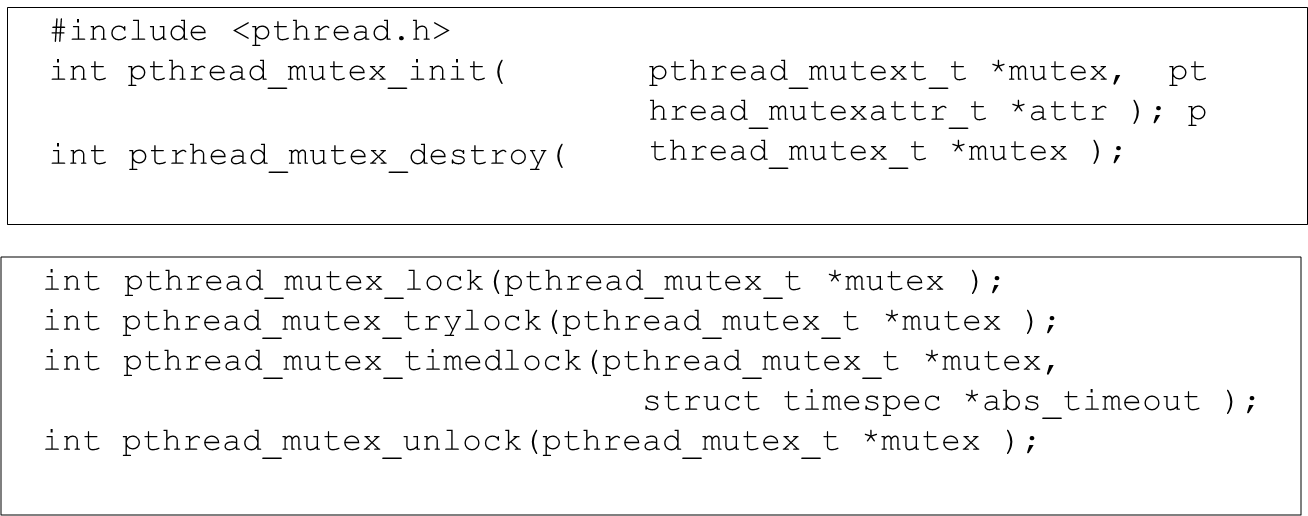
상호배제를 위한 API이다.
시작시 init, destroy는 다 사용했을 때이다.
trylock은 block되지 않게, 바로 리턴한다. 누가 쓰고 있으면
timedlock은 block되는 시간을 정해놓는다.
lock, unlock 사이에 critical section을 넣는다.
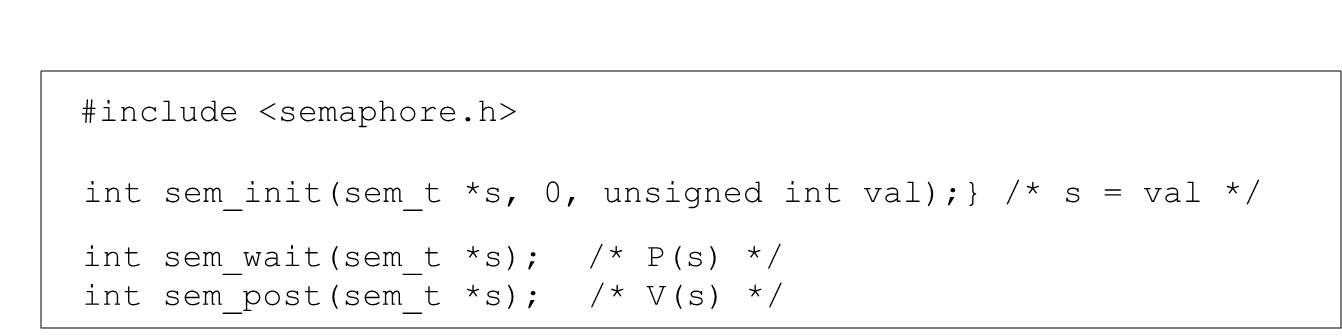
세마 포어에 대한 API이다. 1로초기화하면 상호배제에 대한 코드가 된다.
