ROS 자료 사이트
- https://discourse.ros.org/latest - ROS 커뮤니티 게시판
- https://design.ros2.org/ - ROS2 디자인 문서
- https://github.com/ros2 - ROS2 레포지터리
1. ROS2 다운로드
추후 다시 정리하여 작성 예정
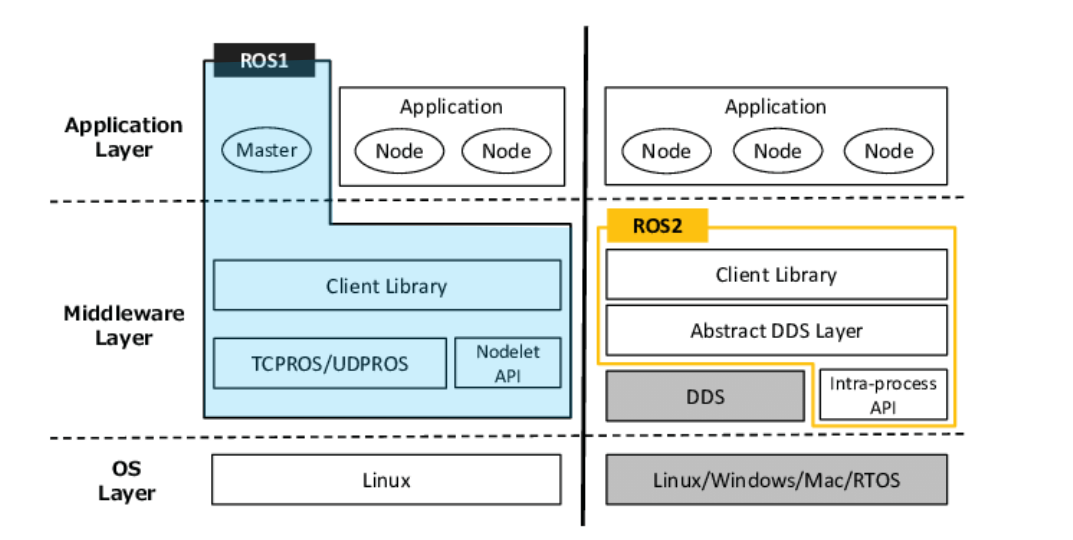
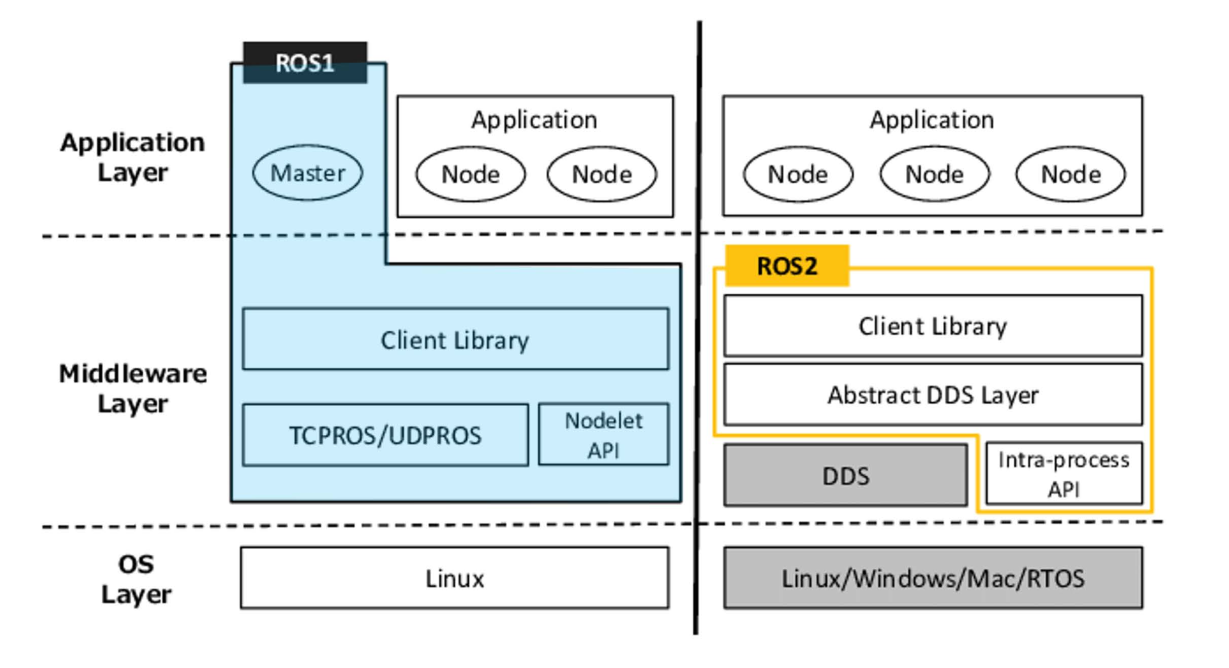
2. ROS1 VS ROS2
| Feature | ROS1 | ROS2 |
|---|---|---|
| Platforms | Linux, macOS | Linux, macOS, Windows |
| Real-time | 실시간 제어 지원 x, external frameworks like OROCOS를 활용해야함 | 실시간 제어 지원, Real-time nodes when using a proper *RTOS with carefully written user code |
| Security | *SROS | SROS2, DDS-Security, Robotic Systems Threat Model |
| Communication | XPMRPC+TCPROS | DDS(RTPS) |
| Middleware interface | - | RMW |
| Node manager | ROS Master | DDS'S dynamic discovery |
| Language | C++03, Python 2.7 | c++14(17), python 3.5+ |
| Client library | roscpp, rospy, rosjava, rosnodejs, and more | rclcpp, rclpy, rcljava, and more |
| Build system | rosbuild -> catkin(CMAKE) | Ament(CMake), PYthoon setuptools(Full support) |
| Build tools | catkin_make, catkin_tools | Colcon |
| Build options | - | Multiple workspace, NO non-isolated build, No devel space |
| Version control system | rosws->wstool, rosinstall | vcstool(*repos) |
| Life cycle | - | Node life cycle |
| Multiple nodes | One node in a process | Multiple nodes in a process |
| Threading model | Single-threaded execution or multi-threaded execution | custom executors |
| Messages | .msg, .srv, *.action | .msg, .srv, .action, .idl |
| Command Line Interface | rosrun, roslaunch, ros topic ... | ros2 run ros2 launch, ros2 topic |
| roslaunch | XML | XML, YAML, Python |
| Graphic API | remappong at startup time only | Remapping at runtime |
| Embedded Systems | rosseroal, mROS | microROS, XEL NEtwork, ros2arduino, Renesas DDS-XRCE(Micro-XRCE-DDS), AWS ARCLM |
*RTOS(Real time operating system):실시간 작업을 수행하기 위해 설계된 운영체계, ROS2는 RTOS와 통합될 수 있게 설계되어 QoS를 통해 데이터 전송의 지연, 안정성, 속도등을 조정할 수 있음
*SROS(Secure Robot Operating System): ROS의 보안기능을 확장하기 위해 설계된 시스템, 인증 메커니즘 및 권한 부여, 무결성 검사 등의 기능을 제공
*TCPROS(Transmission Control Protocol): ROS에서 노드 간의 메세지를 신뢰성 있게 전달하기 위해 설계된 기능, 연결 지향 프로토콜, 스트림 기반
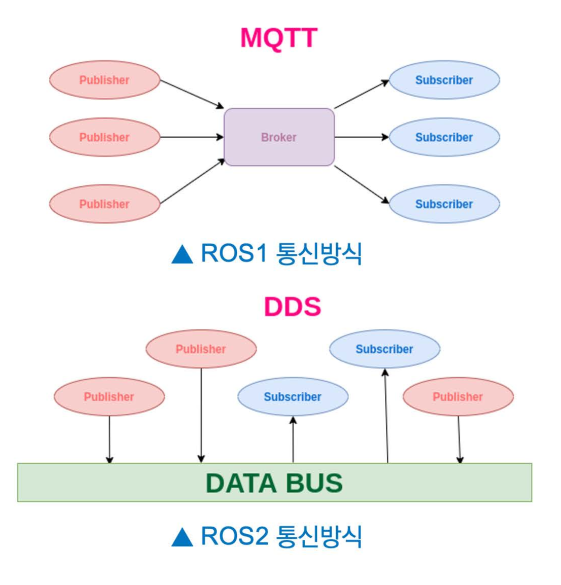
2.1 Security & Communication
- ROS1
- 독자적인 TCPROS(ROS master)을 통해 통신
- MQTT --> TCP 기반으로 브로커를 통해 메세지를 전달
- 이는 보안이 취약한 약점이 존재
- ROS2
- OMG(Object Management Group) - DDS(Data Distribution Service) 도입 --> DDS-Security 적용, 통신단에서 보안 이슈 해결
- SROS 2 개발 --> 보안 관련 RCL 서포트 강화
- DDS --> UDP기반(중간 매개체 없음)
- 신뢰성이 부족하지만 QoS를 설정하여 신뢰성 확보(6가지 옵션)
2.2 Middleware interface
- RMW(ROS middleware): ROS와 미들웨어간의 인터페이스 제공, DDS와 같은 미들웨어 구현을 가능하게 함
- 추상화
- 플러그인 아키텍쳐
- 통신
- QoS 설정
- 이식성
2.3 Build option
ROS2에서의 변화
(1) multiple workspace - catkin_ws와 같은 특정 워크스페이스 확보없이 복수의 독립된 워크스페이스 사용 가능 --> 작업 목적 및 패키기 종류별로 관리 가능
(2) No non-isolated build - 격리 빌드만을 지원하여 모든 패키지를 별도로 빌드 가능, 설치용 폴더를 분리하거나 병합 가능
(3) No devel space - devel 폴더에 패키지 빌드 저장 없이 사용가능 --> 파이썬 코드 편집 후 즉시 실행 가능, 패키지를 빌드 후 설치해야 패키지를 사용할 수 있음
2.4 Messages
- ROS1: 단일 데이터 구조=message --> Topic, Service, Action
- ROS2: OMG에서 정의된 IDL(interfacem description language)를 사용하여 메시지 정의 및 직렬화를 더 쉽게 처리 가능
| Feature | Topic | Service | Action |
|---|---|---|---|
| 연속성 | 연속성 | 일회성 | 복합(topic+서비스) |
| 동기성 | 비동기 통신 | 동기 | 동기+비동기 |
| 방향성 | 단방향 | 양방향 | 양방향 |
| 다자간 연결 | 1:1,1:N,N:1,N:N (publisher:subscriber) | 1:1 (server:client) | 1:1 (server:client) |
| node 역할 | 발행자(publisher), 구독자 (subscriber) | 서버 (server), 클라언트(client) | 서버 (server), 클라언트 (client) |
| Trigger | publisher | client | client |
| interface | msg interface | srv interface | action interface |
| CLI 명령어 | ros2 topic ros2 interface | ros2 service ros2 interface | ros2 action ros2 interface |
| 기타 | - publisher는 QoS 설정을 이용, 데이터 발행 - ROS 통신에서 가장 많이 사용 - 센서 데이터, 로봇상태, 로봇좌표, 로봇 속도 명령 | LED 제어, 모터 토크 On/Off, IK/FK 계산, 이동 경로 계산 등 | 목적지로 이동, 물건 파지, 복합 태스크 등 |
3. DDS
DDS: Data Distribution Service, 데이터 분산 서비스
- 특징
- 산업표준
- 운영체제 독립
- 언어 독립 --> RMS 추상화, ROS Client Library 지원
- UDP 기반의 전송 방식
- 데이터 중심적 기능(Data centric)
- 동적 검색(Dynamic Discovery)
- 확장 가능한 아키텍쳐
- 상호 운용성
- 보안 --> DDS-Security, SROS2
- QoS(Quality of Service): 노드간 DDS 통신 옵션 설정
- 22가지 항목
- ROS2에서 6가지 사용
- Reliable: 데이터 손실 방지 -> 신뢰도
- Reliability: 데이터 통신 속도 -> 신뢰성
- History: 통신 상태에 따라 정해진 크기만큼 데이터 보관
- Durability: subscriber 생성 전의 데이터 사용 및 폐기 여부 설정
- Deadline: 정해진 주기 안에 데이터가 발신 및 수신되지 않을 경우 이벤트 함수를 실행시킴
- Lifespan: 정해진 주기 안에 수신되는 데이터만 유효 판정 그외 삭제
- Liveliness: 정해진 주기 안에서 노드 혹은 토픽의 생사 확인
4. package
package: 하나 이상의 노드가 기능적 단위로 묶인 것, 하나 또는 복수의 노드를 이용해서 작업을 수행하는 집합
- 노드(Node): 특정 작업을 수행하는 실행 파일(로봇 제어, 센서 데이터 처리, 토픽 발행/ 구독 등), 실행가능한 최소한의 프로세서 단위
- 런치 파일(Launch file): 여러 노드를 실행하고, 각 노드의 매개변수, 토픽 및 서비스를 구성하는 Python 파일
- 설정 파일(Configuration file): YAML 파일로 노드나 노드 그룹의 매개변수, 토픽, 서비스 등을 정의
- 라이브러리(Library): C++ 또는 Python 라이브러리로 메시지 정의, 알고리즘, 드라이버 등 재사용 가능한 기능을 제공
- 자원(Resource): 이미지, 소리, 모델 등의 데이터 파일로 노드나 시각화 도구에서 사용
- 테스트(Test): 유닛 테스트, 통합 테스트, 시스템 테스트 등으로 패키지의 정확성과 견고성을 검증
- 문서(Documentation): README 파일, 튜토리얼, API 참조 등으로 사용자가 패키지를 이해하고 사용할 수 있도록 도움

공부하는 거북이