1. Build
1.1 부가기능 설치
- rosdep(의존성 관리툴)
rosdep update
rosdep init1.2 build 명령어 및 tip
- 'colcon build'
colcon build는 모두 다 복사하여 빌드하는 것이고 symlink-install을 사용하면 빌드된 파일을 실제로 설치하지 않고 심볼릭 링크를 사용해 더 적은 디스크를 사용하는 것
build
install
log
mkdir [workspace_name]
cd [workspace_name]
colcon build --symlink-install
colcon build --packages-select <package_name>1.3 package
mkdir [workspace_name]
cd [workspace_name]
mkdir src
cd src- workspace안의 src 폴더 안에 패키지를 작성
- 패키지를 만들기 전에 ROS 환경 호출 필요
2. package
2.1 workspace
mkdir [workspace name]
cd [workspace name]
mkdir src # package 생성 dir
cd src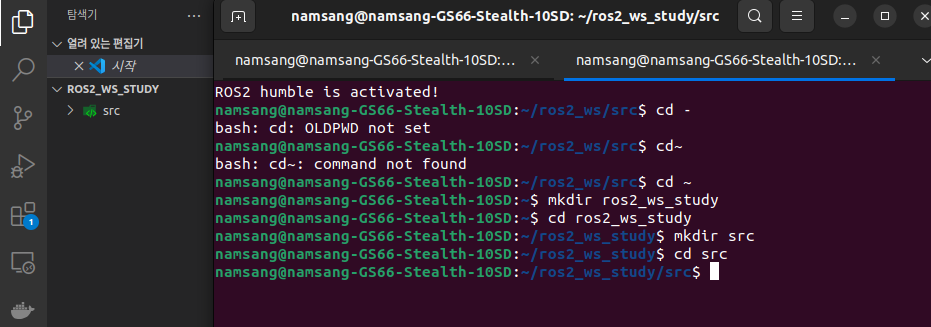
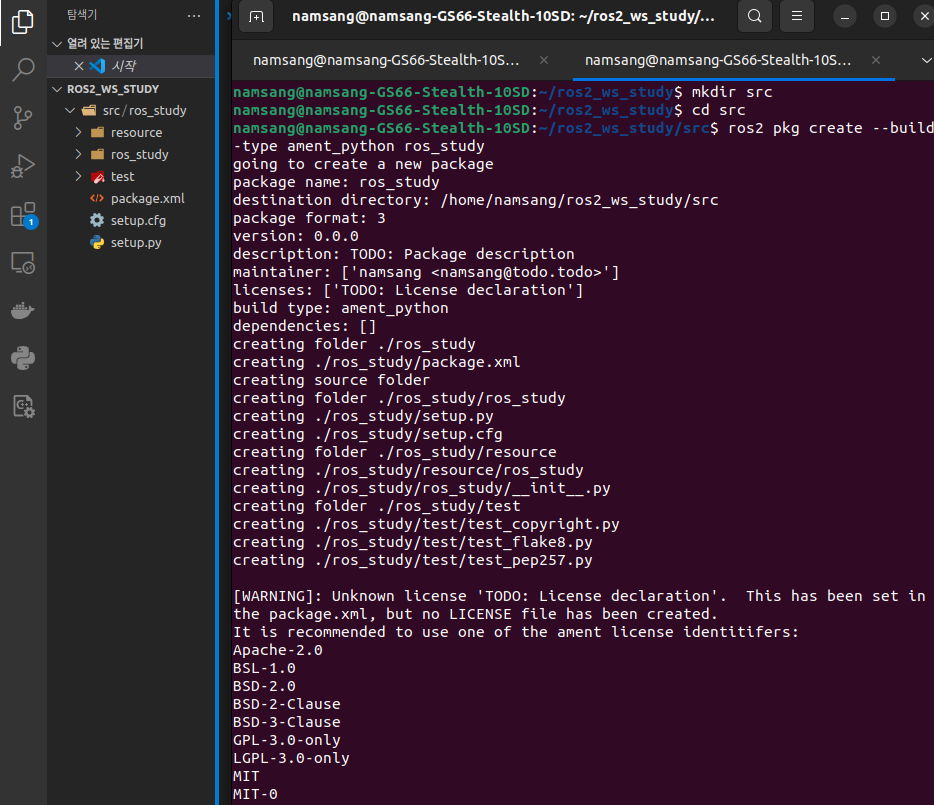
2.2 generate package
ros2 pkg create [package_name] --build-type ament_python --dependencies [의존 패키지] # 파이썬으로 패키지 생성
ros2 pkg create --build-type ament_cmake [package_name] --dependencies [의존 패키지]# c++로 패키지 생성
2.2.1 package files
1) package.xml package.xml
2) setup.py & setup.cfg setup
3) publisher & subscriber node python code - helloworld_publisher & _subscriber.py pub_sub

공부하는 거북이