Visual Recognition Task
- image classification, Object Detection, Sementic segmentation 크게 3가지 분류
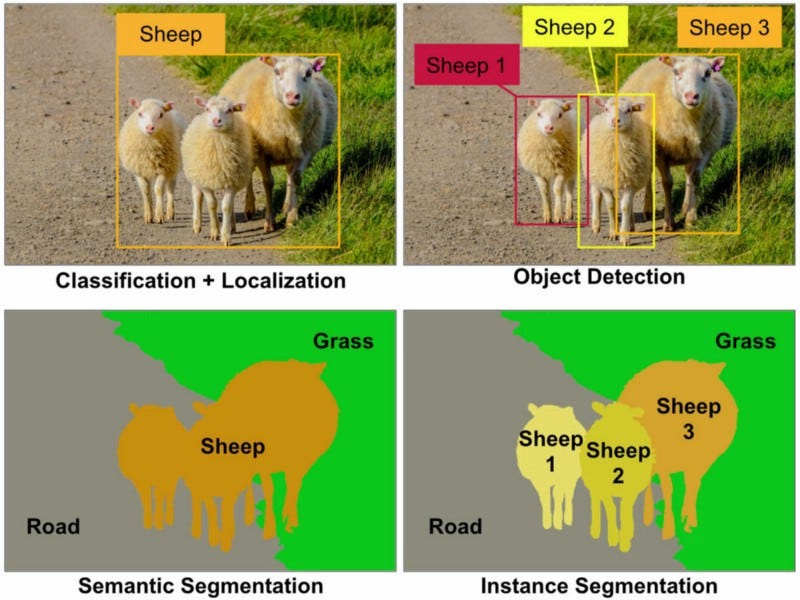
classification Vs object detection
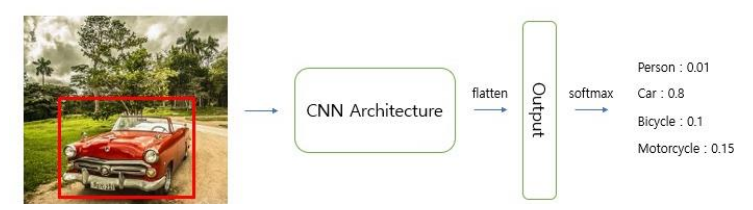
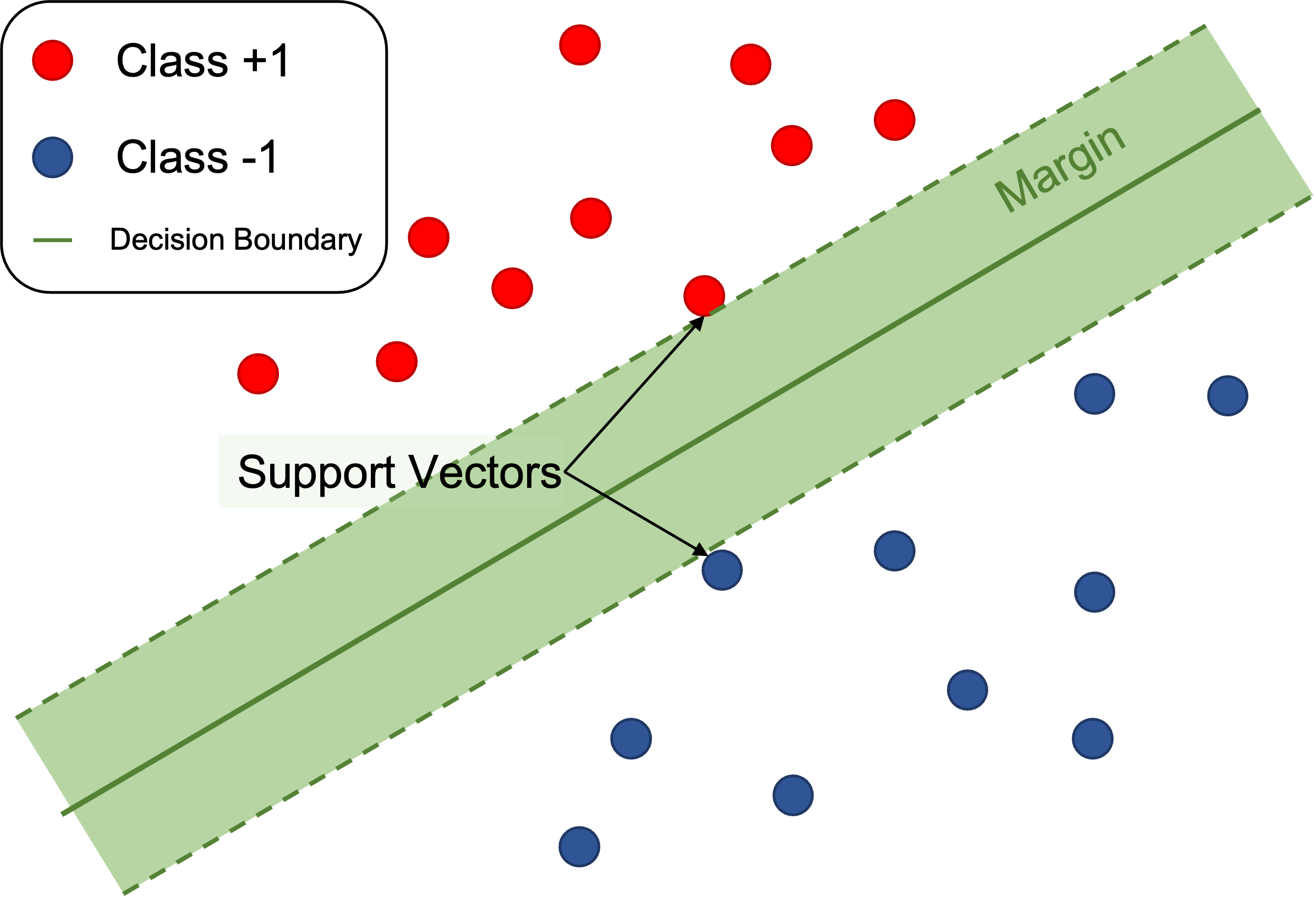
classification
- image에서 feature를 뽑고 feature의 embadding space에서 decision boundary를 찾는 것이 목표
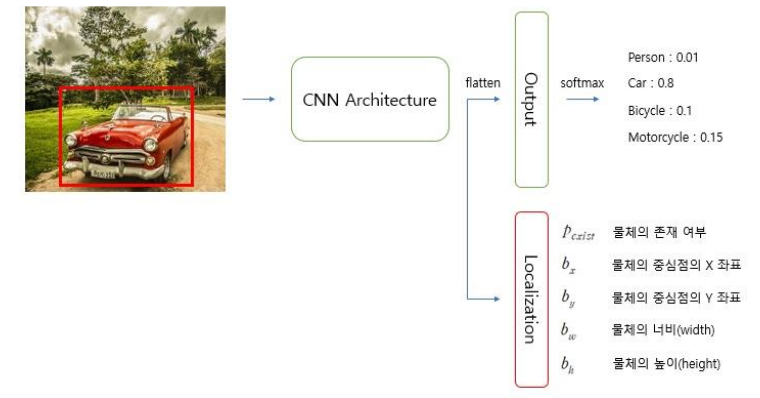
object detection
-
feature map에서 위치 정보까지 근사 시킬 수 있다면?
-
object detection + localization
-
localization :class label을 찾는 과정이 아니라 objectness에 대한 위치가 어디인지만 찾아주는 것이 목표
-
bounding box
-
box를 localization하고 box에 대해 classification하여 Box가 무엇인지 예측
-
Detection = Classification + Localization
-
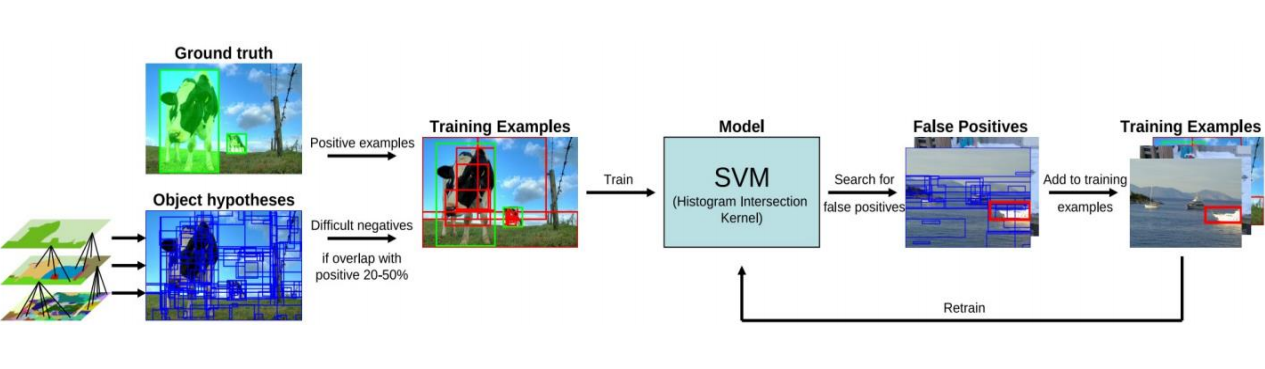
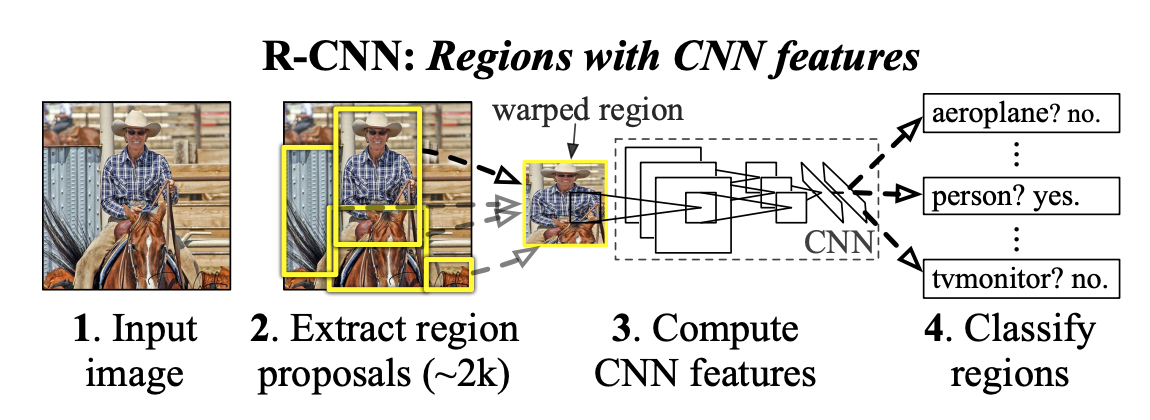
Box localization은 보통 object proposal을 뽑고, Box classification은 CNN architecture를 사용하거나 고전 적인 classification model인 Support Vector Machine(SVM)과 같은 classifier를 사용
-
Segmented region proposals을 사용하여 candidate object
locations 구함 -
SVM으로 object recognition(객체 인식)
evaluation
- IOU, Recall, Precision, AP, mAP, FPS, FLOPs...
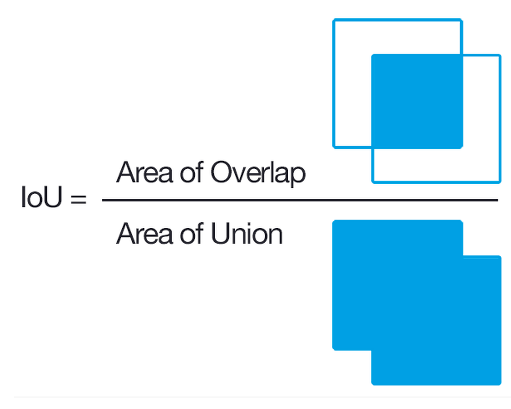
IOU(intersection of Union)
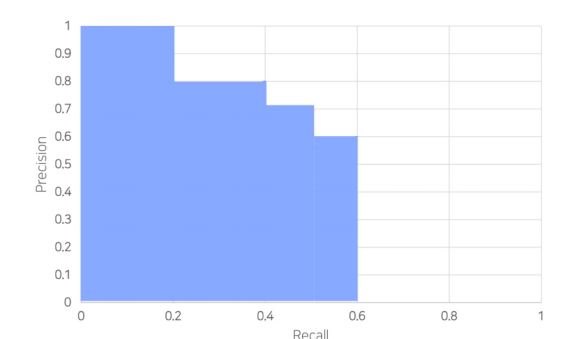
Recall & Precision
- Recall : 정답 box를 맞춘 수 / 전체 정답 box수
- Precision : 예측한 box중에 정답을 맞춘 수 / 예측한 box수
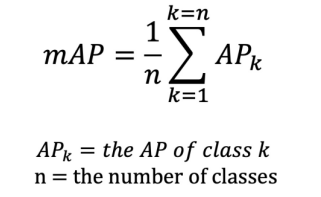
AP & mAP
-
AP : Presision-Recall curve 아래 면적
-
mAP : mean Average Presision, 각 class별 계산한 AP의 평균
FPS & FLOPs(속도)
- FPS : Frames Per Second, 초당 처리 가능한 frame 숫자
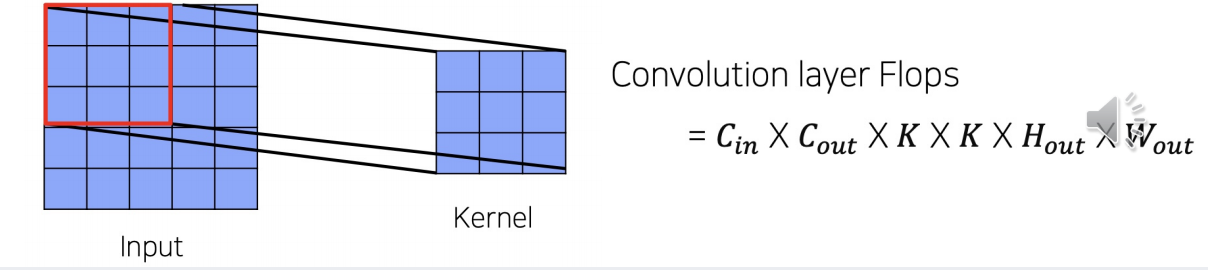
- FLOPs : Floating Point Operations, model이 얼마나 빠르게 동작하는지 측정하는 metric, 연산량 횟수
Algorithm
- 크게 1stage detector, 2stage detector로 분류할 수 있다.
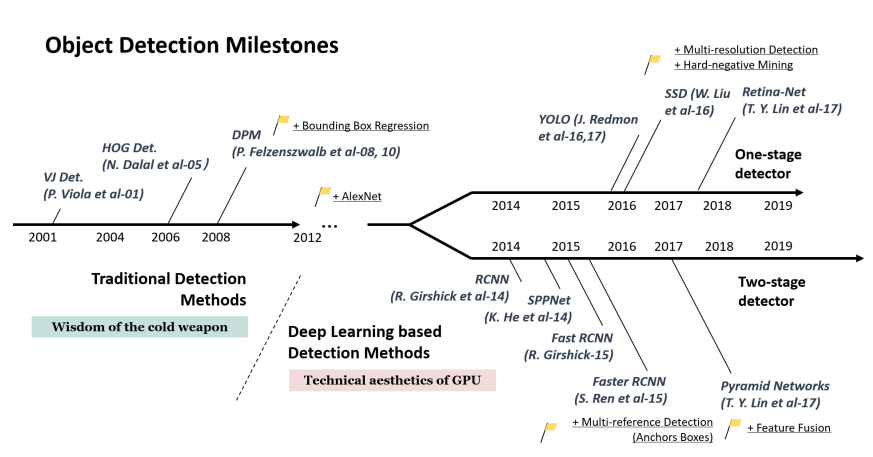
1stage detector VS 2stage detector
-
2stage detector : localization과 classification 문제를 순차적으로 진행한다.-> 비교적 느리지만 정확도가 높음
-
1stage detector : localization과 classification문제를 한번에 해결한다. -> 비교적 빠르지만 정확도가 낮음
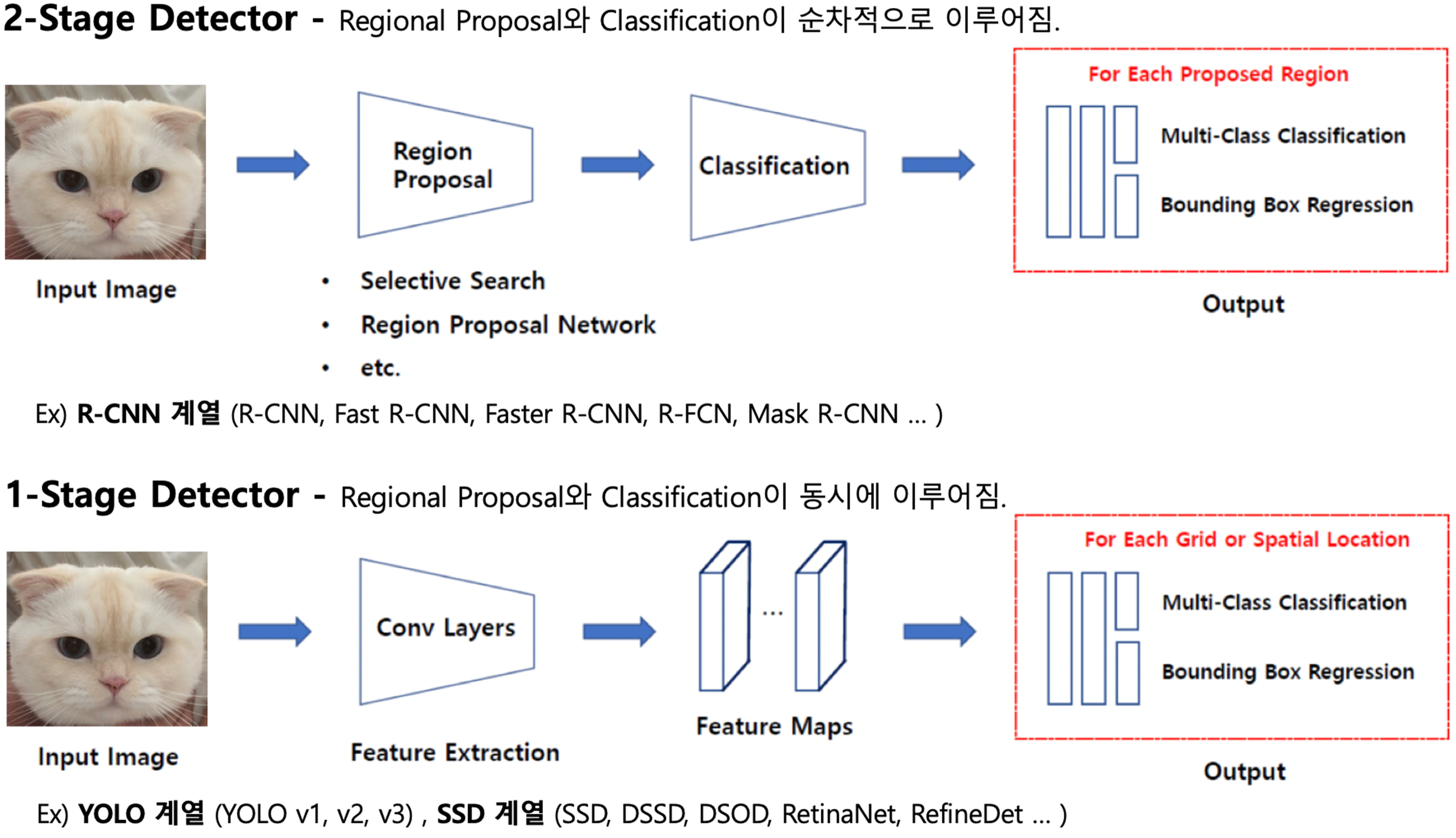
2stage detector
- Region based CNN(R-CNN)

-
spacial pyramid pooling

-
Fast R-CNN
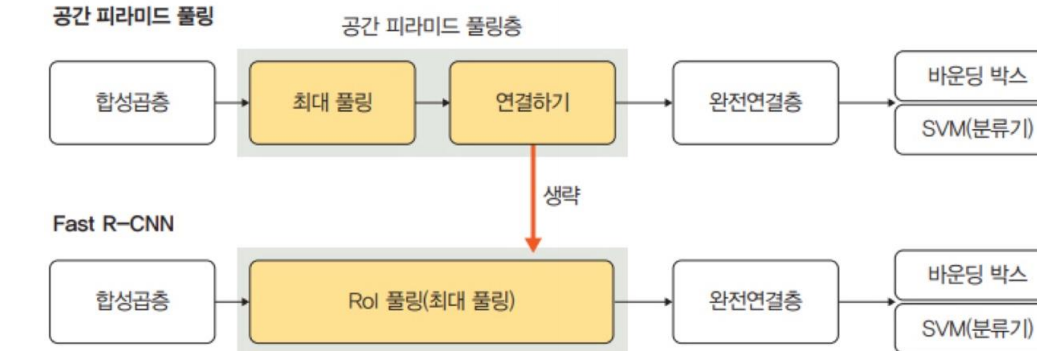
-
ROI pooling
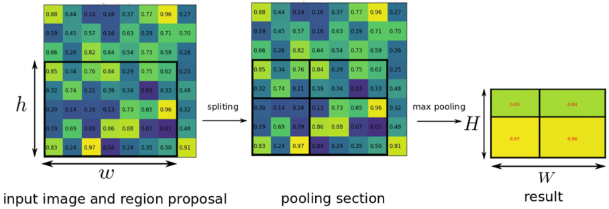
-
Faster-RCNN : fast-rcnn + Region Proposal Network
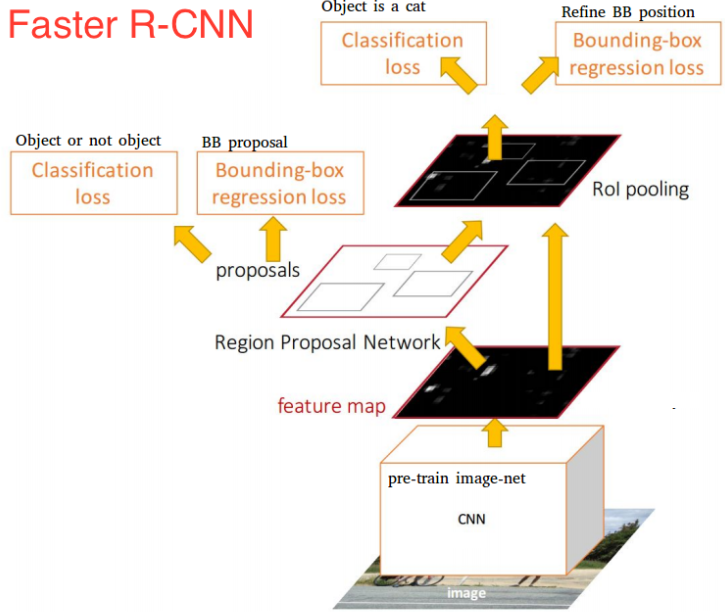
-
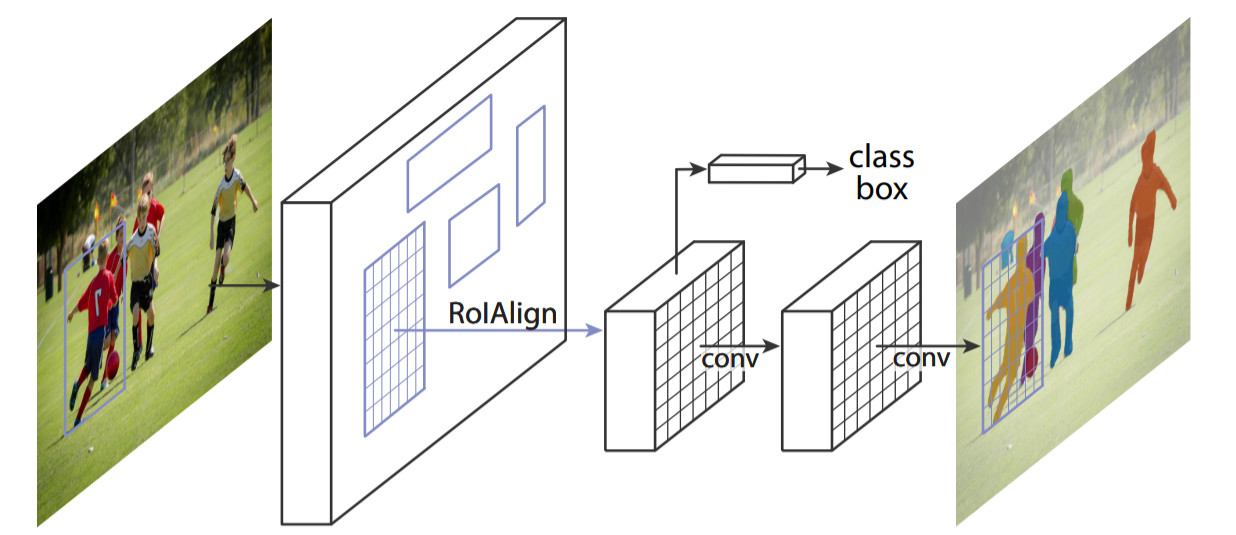
Mask R-CNN
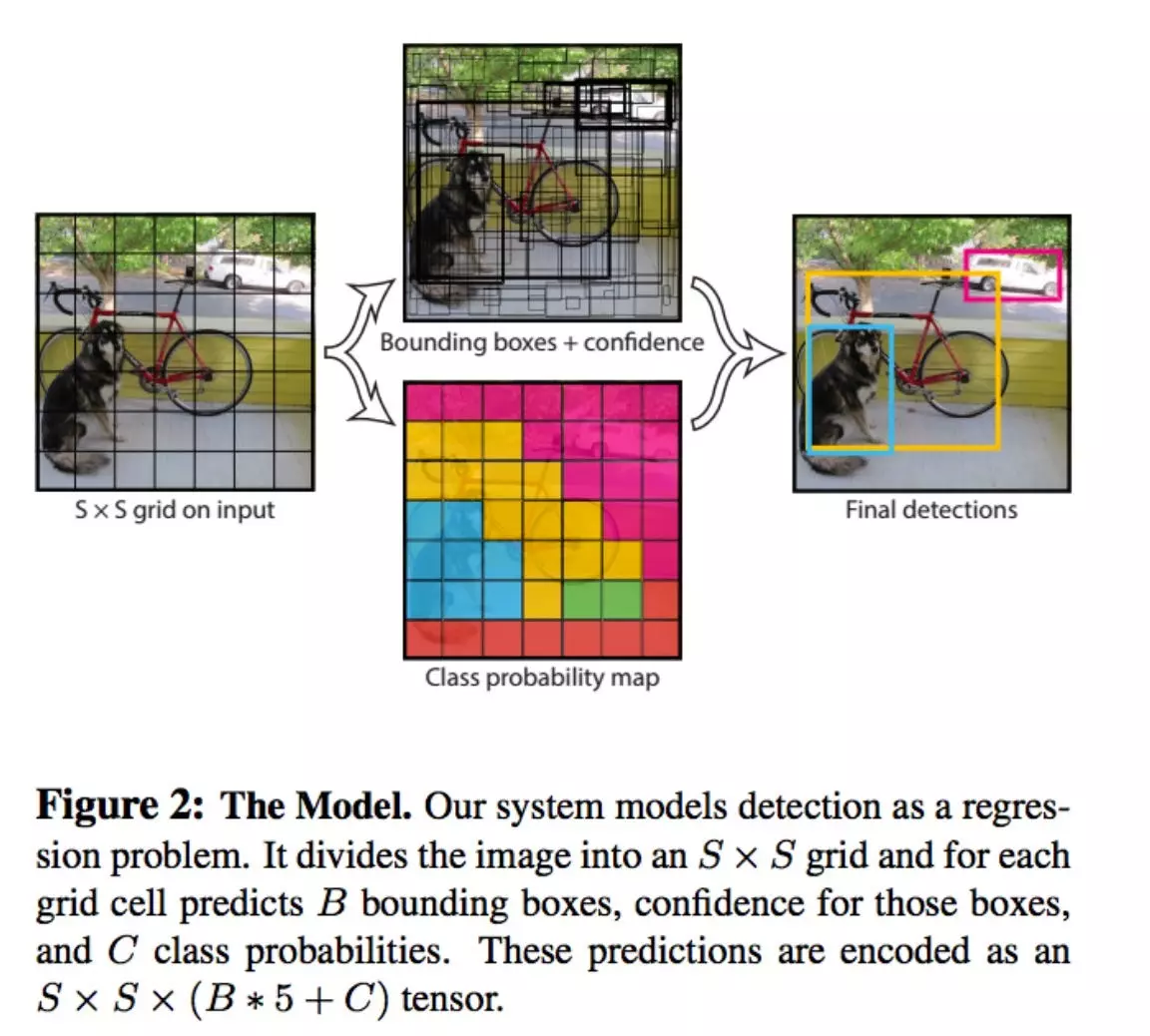
1stage detector
- YOLO : You Only Look Once
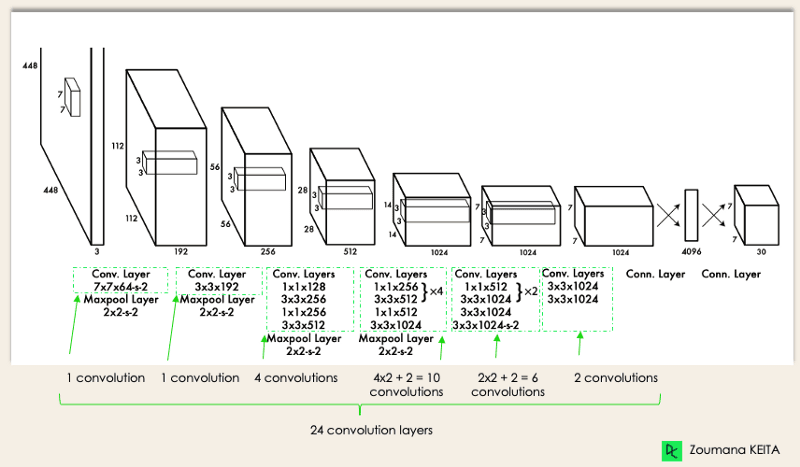
Convolution Additional Object Detection Techniques
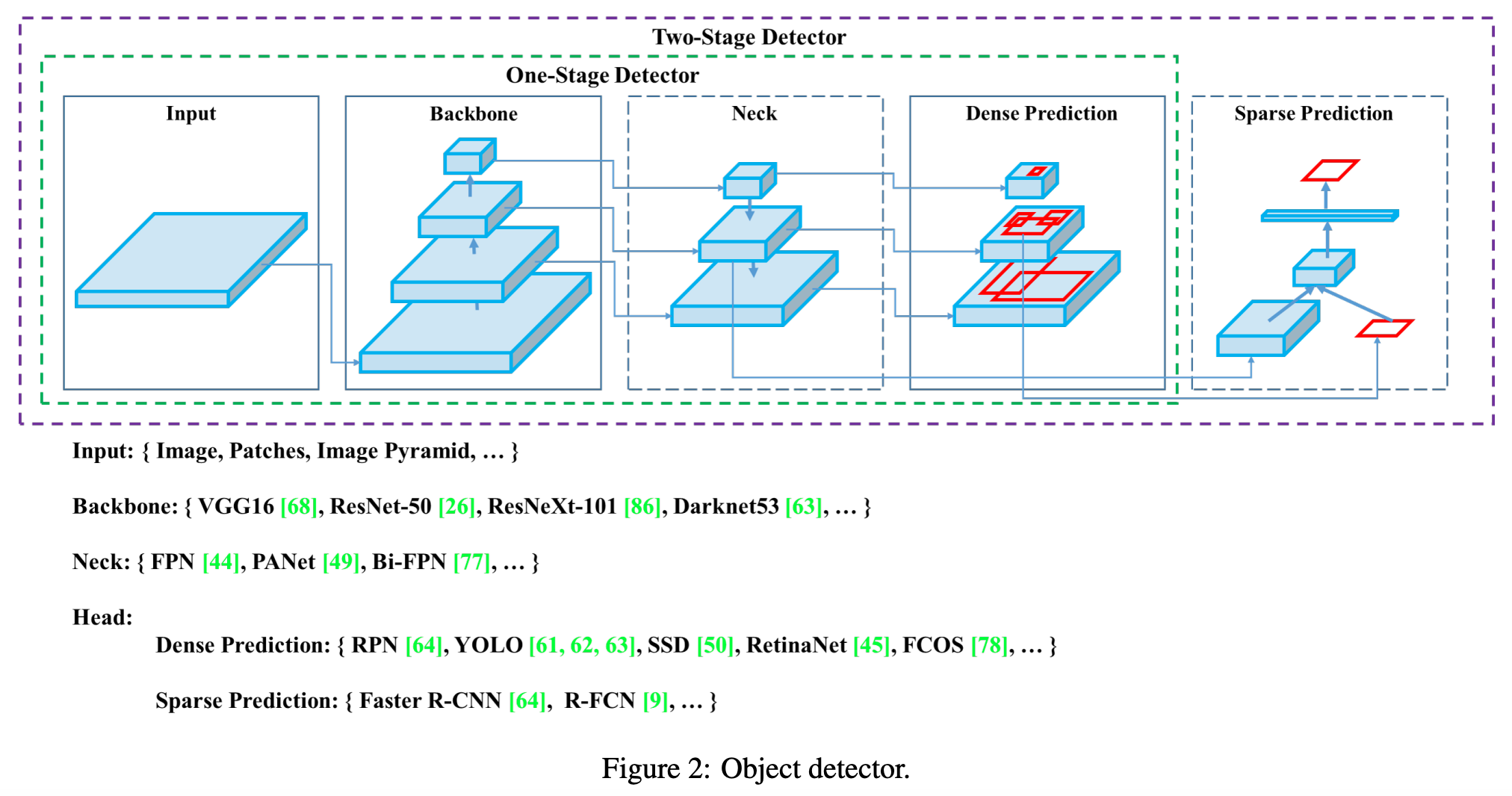
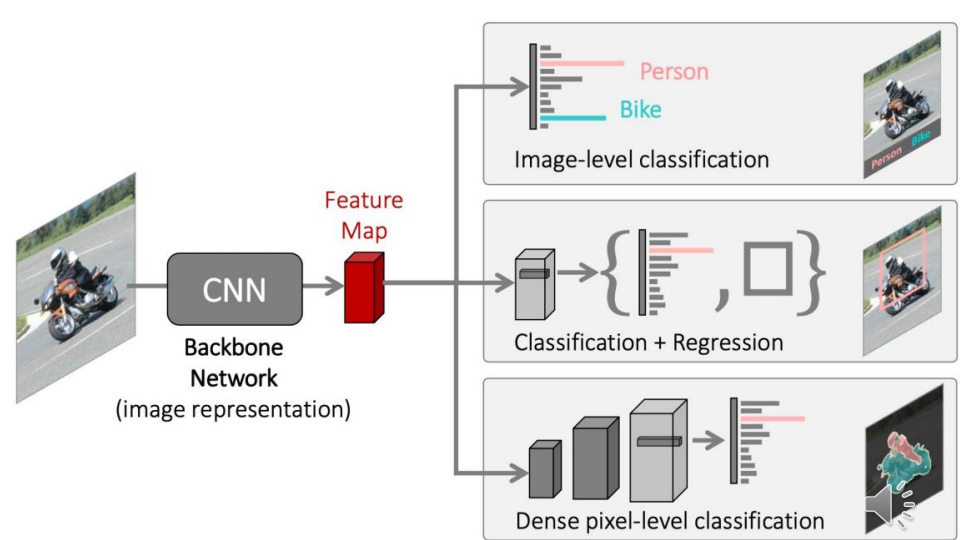
- beckbone-neck-head
- beckbone(restnet, vggnet....)
- bottom : input img- middle : conv layer
- top : feature map
- Neck : backbone과 head사이를 이어주는 연결부(다양한 사이즈의 feature map을 사용하기 위함)
Additional Object Detection Techniques
-
FPN(Feature Pyramid Network)
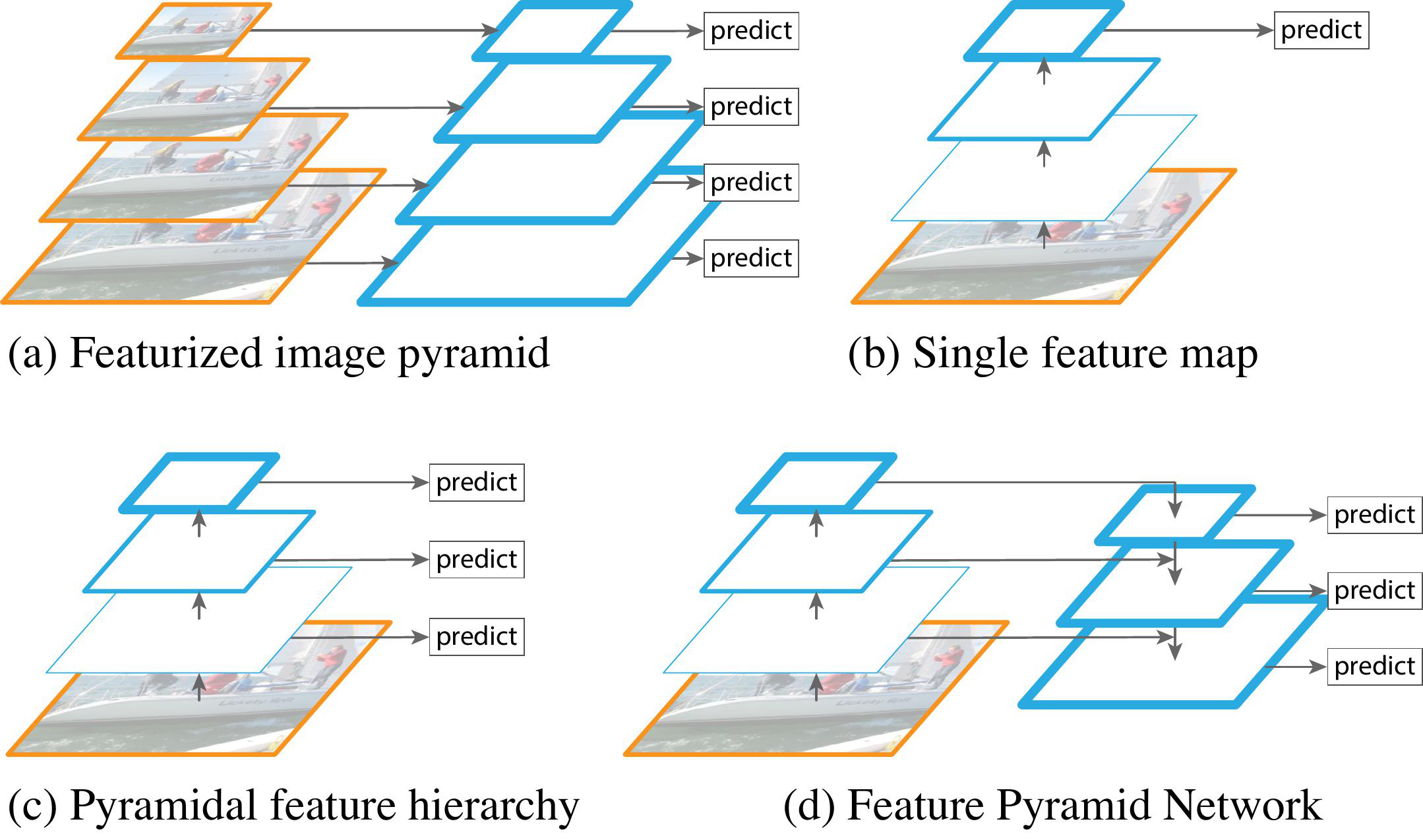
-
Path Aggregation Network(PANet)
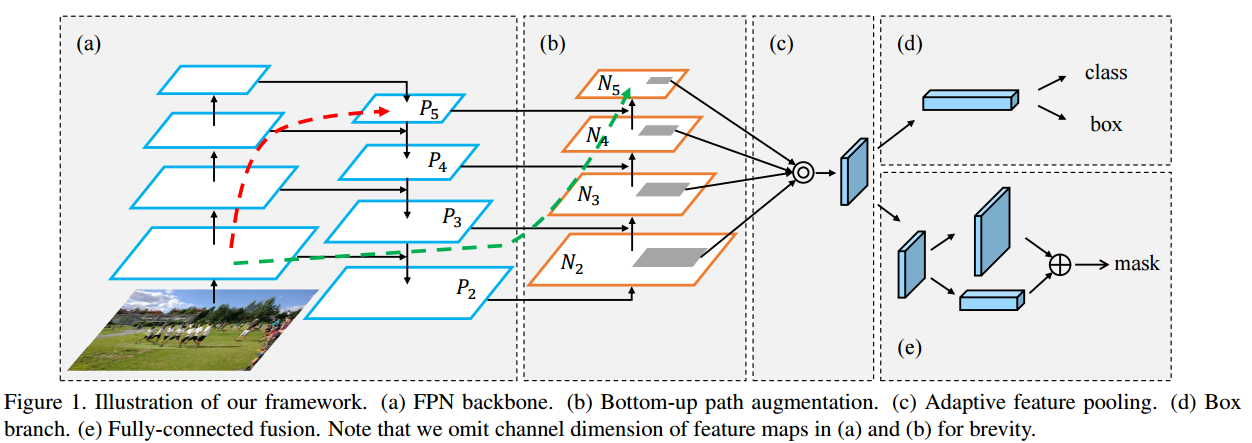
-
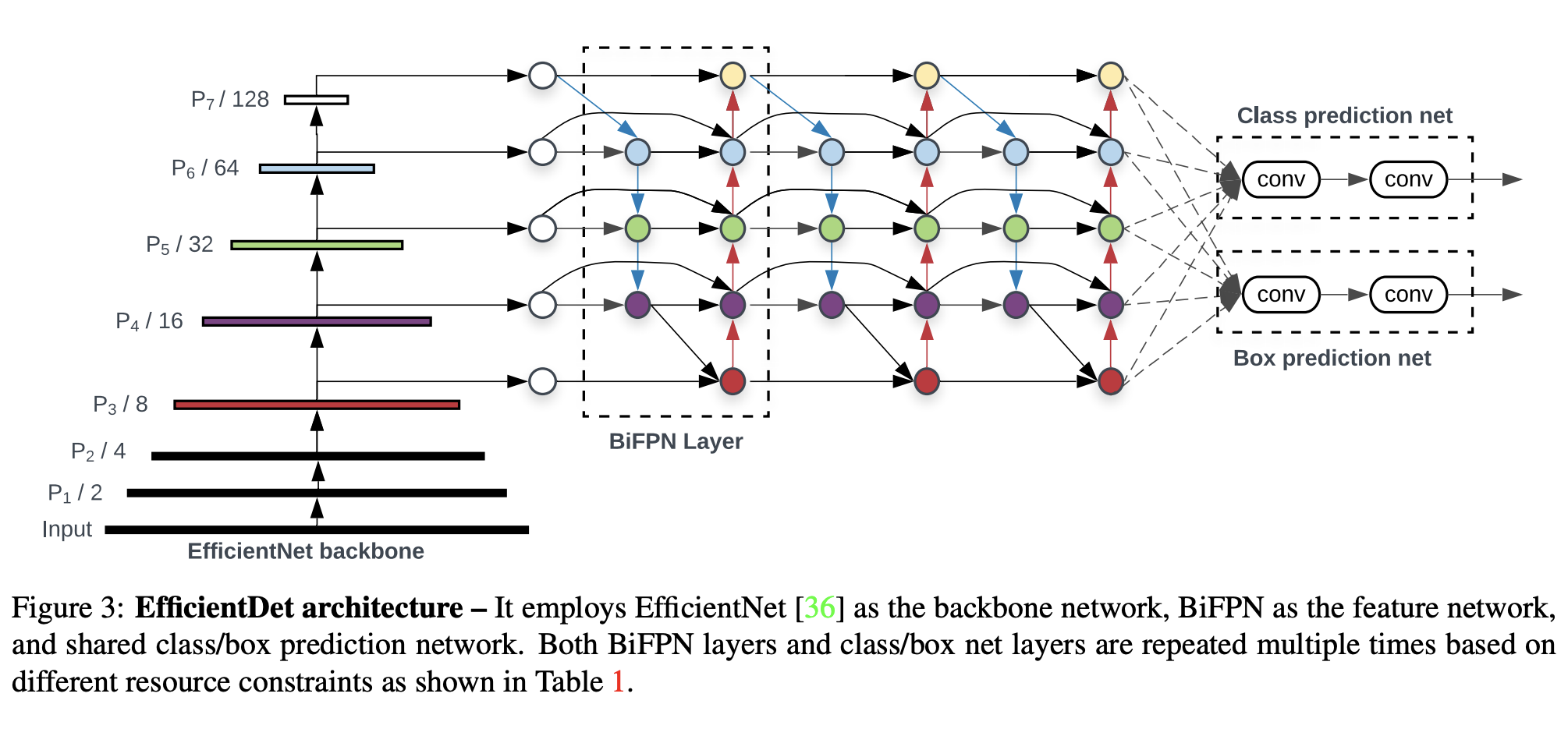
EfficientDet
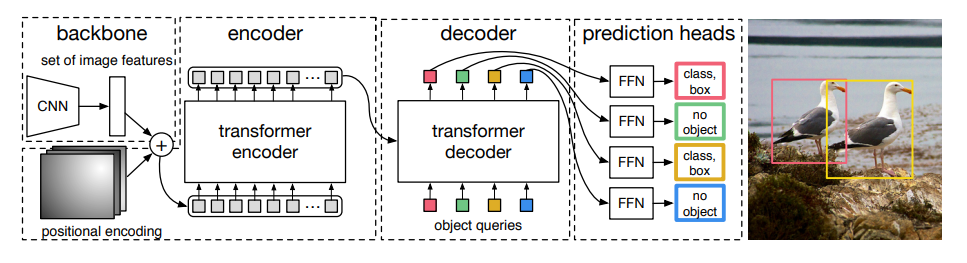
Advanced Object Detection
- Detection Transformer(DeTR)