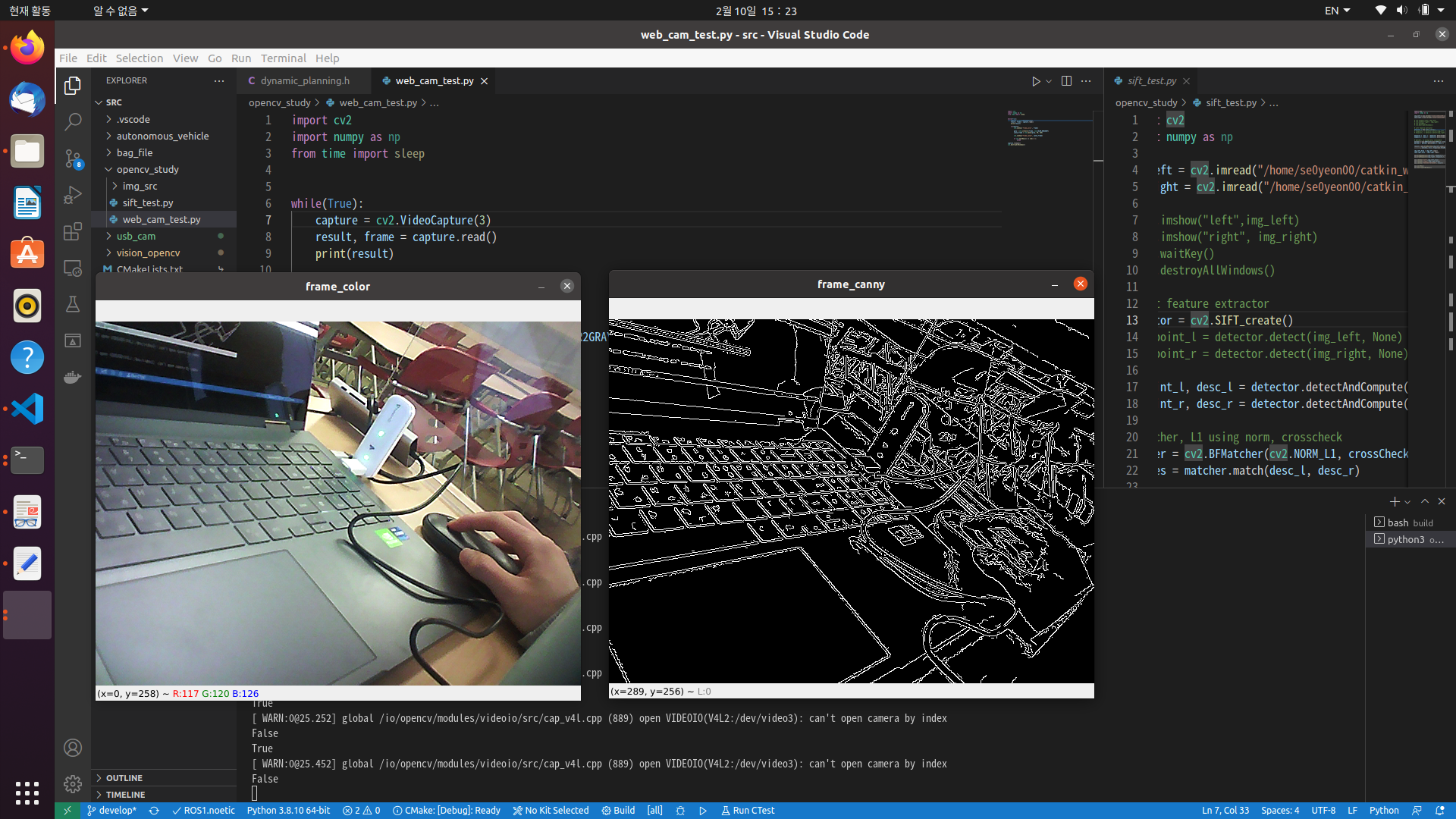
opencv 에서 webcam 연동하는 것도 성공
간단하게 canny edge detection 까지 해서 출력
ROS 에서는 usb_cam node 를 만들어서 image 로 publish 할 수 있는 것까지 확인했으므로... 이제 많은걸 할 수 있겠구만 (과연^^)
# 간단한 테스트용 코드
import cv2
import numpy as np
while(True):
capture = cv2.VideoCapture(3) #내 웹캠장치가 /dev/video3 라 3을 넣음
result, frame = capture.read()
print(result)
if(result):
cv2.imshow('frame_color', frame)
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
canny_frame = cv2.Canny(gray, 50, 100)
cv2.imshow("frame_canny", canny_frame)
if cv2.waitKey(1) == ord('q'):
break
capture.release()
cv2.destroyAllWindows()
아주 잘 동작한다
근데 cv2.waitKey() 속도 지정이 너무 마음에 안 든다! 너무 느려!

._.