pcl
1.PointCloud 를 Voxel grid 로 다운샘플링 하기
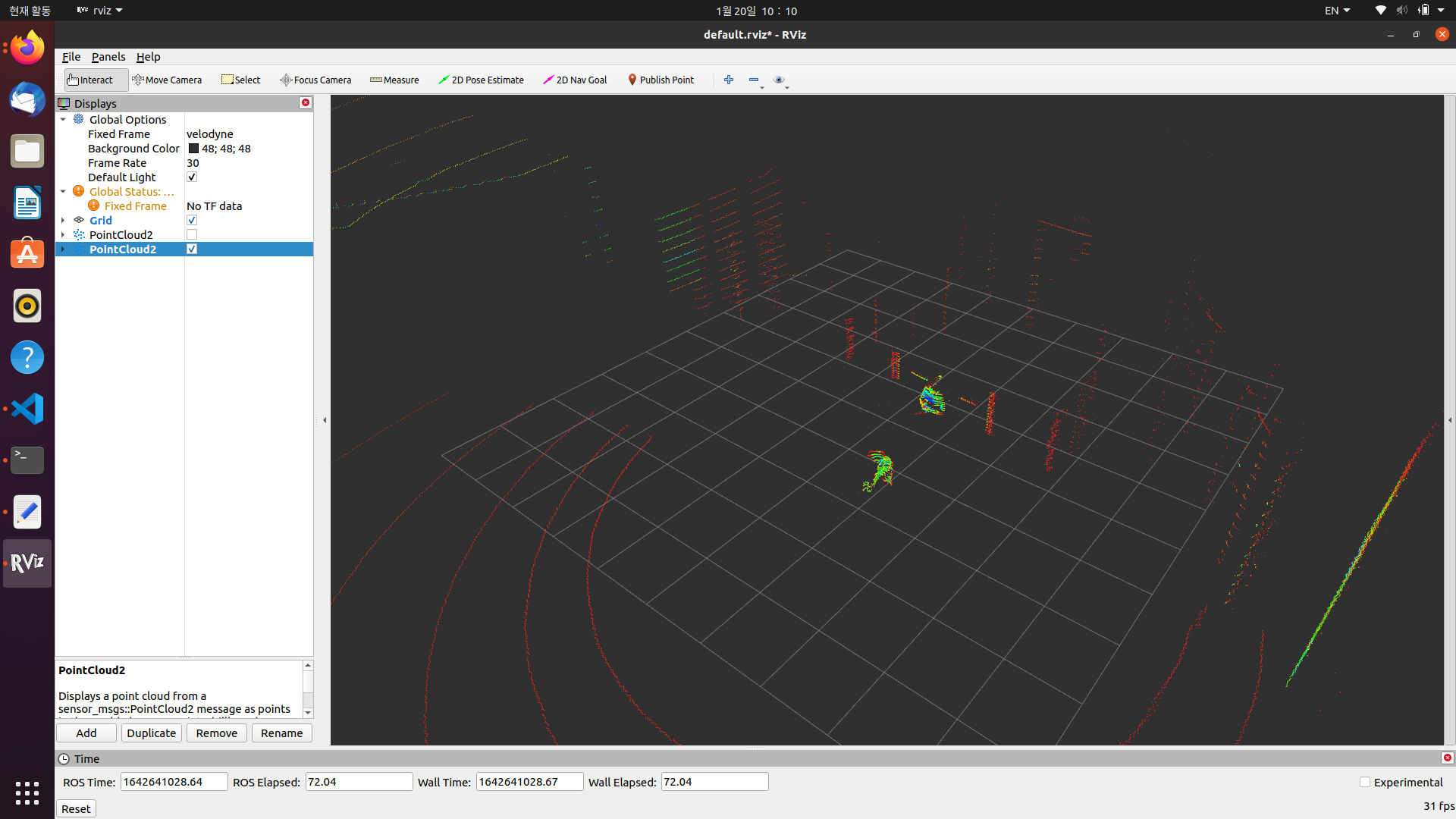
point cloud를 일부 voxelgrid 로 down sampling 하기pcl tutorial 에서 사용하는 lobby_lidar.bag 파일을 사용위와 같이 포인트 클라우드의 샘플링이 이뤄진 것을 확인 가능하다
2022년 1월 20일
2.POINTCloud 에 SAC 알고리즘 가진 모델 적용해보기

일단 여기서 해본 건 ROS bag 파일에서 sensor_msgs/pointCloud2 타입의 데이터를 받아와서 pcl 라이브러리 내의 pointCloud 타입으로 처리, 이때 T 에는 pointXYZ 타입을 넣음 그리고 라이브러리에 정의된 SAC 모델을 사용해서 po
2022년 1월 20일
3.OCTREE 로 주변 포인트 탐색하기

PCL 라이브러리의 Octree 를 보고 따라한 것!먼저 octree 를 만들고 난 후 특정 Search point 에서 가까운 points 들을 뽑아내는, 대표적인 방법에는 voxel search, knn search, radius search 가 있다. 푱푱...이
2022년 6월 28일