오늘은 트리 종류 중 하나인 B트리 시리즈를 정리해보려고 한다.
C로 구현도 해볼 건데, 구현 코드는 다른 포스팅에서 한번 더 정리할 예정이다. 이 포스팅에서는 B트리 개념에 대해서 알고가자.
B트리를 이해하기 전에 먼저 디스크 구조부터 이해하자.
디스크 관련 내용 참조 강의 : https://www.youtube.com/watch?v=aZjYr87r1b8&ab_channel=AbdulBari
- 디스크는 섹터와 트랙으로 나뉘어져있음.
- 섹터는 디스크 영역을 파이처럼 나눔.
- 트랙(레벨)은 디스크의 깊이.
- 블럭은 특정 트랙의 섹터
- 블럭이 512 바이트로 이루어져있다고 하면, 0부터 511까지 1바이트씩 이루어져있는데, 1바이트는 각자의 주소를 가지고있다.(그걸 offset이라고 한다.)
- 디스크의 특정 지점을 읽으려면 섹터,블럭,offset을 알아야 한다.

데이터가 흐르는 과정 : 메인 메모리에서 프로그램을 돌리려면 데이터를 디스크에서 가져온다 → 결과가 나오면 그걸 디스크에 다시 담는다.
메인 메모리 내의 프로그램이 쓰는 데이터의 집합을 data structure라고 부른다. 데이터를 디스크에서 효율적으로 조직하는걸 DBMS라고 부른다.
예를들어 데이터베이스가 있고, Employee라는 테이블이 있다고 가정하자.
Employee
- eid - 10byte
- name - 50 byte
- dept - 10byte
- section - 8byte
- add -50 byte
총 128byte
- 데이터 베이스에는 100개의 record가 있는데, 1개의 record는 128byte라고 간주한다.
- 블록 1개가 512byte니까 1개의 블럭에 4개의 record를 넣을 수 있는 것이다. 디스크에 100개의 레코드를 넣으려면 총 25개의 블록이 필요하다.
- 이 데이터베이스에서 특정 데이터를 찾으려면 현재 상황으로는 25개의 블록을 하나씩 다 찾아봐야 한다. 운이 없으면 모든 블록을 다 탐색해야 한다.
- 그래서 빠른 탐색을 위해서 indexing을 해야 한다. index에는
eid와pointer가 존재한다. 각각의 pointer는 각각의 eid가 속한 레코드를 가리킨다.(레코드 포인터) - 그러면 index는 어디에 저장되어있는가? index 또한 디스크에 저장되어있다. 단 데이터베이스와 따로 저장되어 있다. 100개의 인덱스를 저장하는데에는 4개의 블록이 필요하다.
- 이제 데이터 탐색을 할 때 인덱스에 접근한다. 인덱스는 4개의 블록에 있으니까 4개의 블록을 탐색한다. 그리고 특정 인덱스에서 포인터를 찾아서 그 포인터가 속한 블록으로 들어간다. 그러면 5개의 블록을 탐색하는거다.
멀티 인덱스
- 만약 레코드가 많아져서 1000개가 됐다고 생각해보자.
- 그럼 인덱스를 구성하는 블록의 개수도 40개로 많아진다. 인덱스 탐색의 효용이 작아진다.
그러면 어떻게 해야 하는가?
- 인덱스를 위한 인덱스를 만들면 된다. 한 개의 블록에 32개의 인덱스가 들어가니까,
- 인덱스 of 인덱스에서 1번째 인덱스는 1번째 블록에 들어갈 진입포인트, 2번째 인덱스는 2번째 블록에 들어갈 진입포인트... 등으로 구성한다.
- 인덱스 of 인덱스는 2개의 블록으로 구성된다.
즉, 총 필요한 블록은 92 블록이다.
- 인덱싱 of 인덱싱이 깊어지면 레벨이 생길 것이다. 그걸 트리형태로 표현하면 그게 B 트리의 원형이 된다. (이런 인덱싱 관리를 매번 수동으로 할 수 없으니 자동으로 self manage high level indexing을 하려고 한게 B트리이다.)
우선, B Tree를 알기전에 M-way Search Tree를 알고가자.
M-way search tree(MST)
이진 탐색 트리의 특성을 띄어서 자식 노드를 구성할 때 작은 건 왼쪽, 큰건 오른쪽에 오는 트리이다. 한 개의 키에 2개의 자식 노드가 있다.

MST는 한개의 노드에 여러개의 키가 있을 수 있다. 자식 노드에도 여러 개의 키가 들어갈 수 있다.
예를 들어 한 개의 노드에 2개의 키가 들어가면, 자식 포인터는 3개를 가질 수 있다. 이걸 3-way search tree라고 한다.
4-way search tree 같은 경우 3개의 key가 들어가고 4개의 자식을 가질 수 있다.
노드 구성1 ⬇️
예시1 : child pointer | key1 | child pointer | key2 | child pointer | key3 | child pointer
이 구성을 가지고 멀티 인덱싱 용도로 응용해보자. 결국 인덱싱은 레코드를 포인팅해야하니까 레코드 포인터도 필요하다.
노드 구성2 ⬇️
예시2 : child pointer | key1 | record pointer | child pointer | key2 | record pointer | child pointer | key3 | record pointer | child pointer
B Tree
M-way tree의 차수가 많아지면 트리의 높이도 n이된다. 커지면 비효율적이게 되는 것이다. 그래서 B트리라는 걸 만들어서 규칙이 있는 m-way search tree를 구상했다.
[규칙]
- 루트를 제외한 모든 노드는 ⌈m/2⌉ 만큼의 자식 포인터를 가져야 한다. 차수가 10이면 한 개의 노드가 자식 포인터를 최소 5개 가져야한다.
- 루트 노드는 최소 2개의 자식 포인터를 가져야 한다.
- 모든 리프 노드는 똑같은 레벨이어야 한다.
- creation process는 bottom-up이라고 생각하면 된다.
Creation process
데이터가 10,20,40,50이 있다. 차수는 4이다.(= 노드의 데이터는 3개 들어갈 수 있다.)
-
처음 노드에 10,20,40 키를 넣는다.
-
이제 50을 넣으려고 하는데 노드에 자리가 없다. 그래서 노드를 하나 옆에 추가하고, 50을 거기 넣는다.
-
그리고 1번째 노드에서 40을 빼서 부모 노드로 만든다.
-
40의 왼쪽 자식 노드는 (10,20)이 되고, 오른쪽 자식 노드는 (50)이 된다.
40
↙️ ↘
(10,20) (50)
- 이렇게 계속 위로 가기 때문에 bottom-up creation process이다.
B Tree에서 레코드 포인팅 하는법
결국 노드들은 데이터베이스의 레코드를 가리켜야 한다. B 트리에서는 각 노드마다 레코드 포인터가 존재한다.
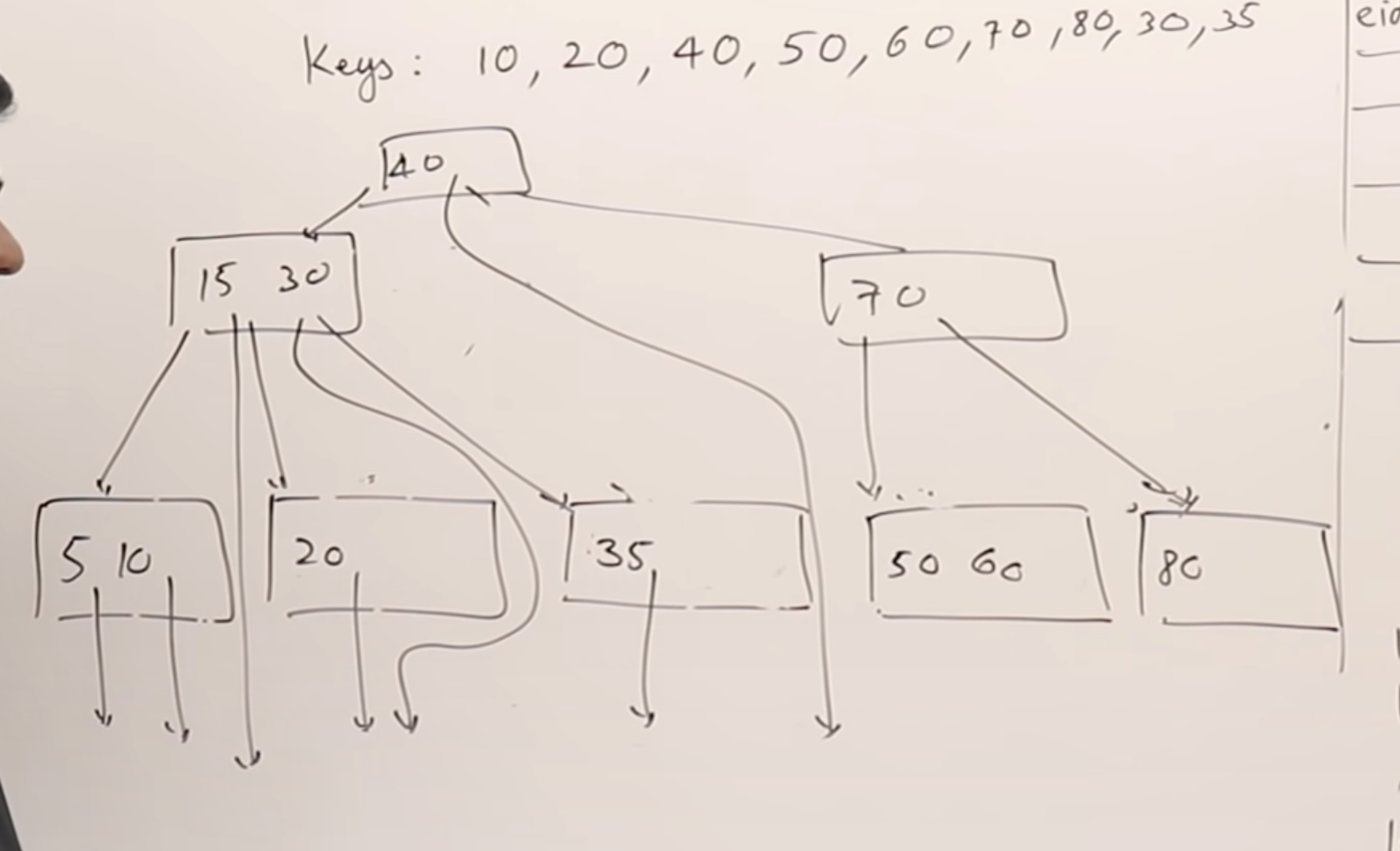
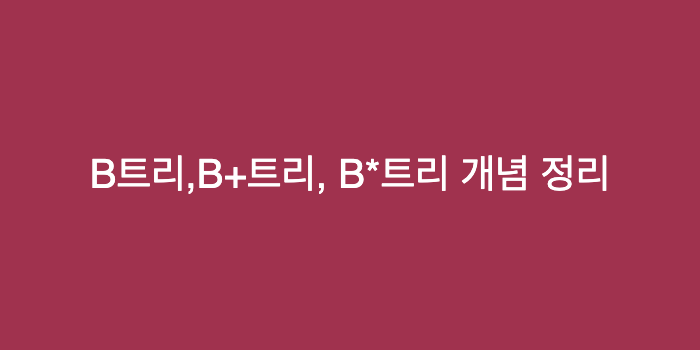
B+ Tree
- B tree는 모든 노드에 레코드 포인터를 가지지만, B+ Tree는 오직 리프 노드에서만 레코드 포인터를 가진다. 그래서 대신에 리프 노드에 모든 키들이 존재해야 한다.(부모노드에도 존재한다.)
- 모든 리프노드는 왼쪽에서 오른쪽으로 연결되어있다. (연결리스트 활용)
추가 개념 정리
B-트리
이진트리의 확장된 버전으로 하나의 노드가 가질 수 있는 자식 노드의 최대 숫자가 2보다 큰 m원 탐색 트리 자료구조이다.
노드의 자식 노드 레벨 규칙을 두어 전체적으로 트리의 균형을 유지하기 때문에 기본적인 m원 탐색 트리보다 향상된 탐색 성능을 가지고 있다고 볼 수 있다. B트리의 특징을 열거하면 아래와 같다.
- 노드가 삽입되거나 삭제될 때, 내부 노드는 자식 노드의 수를 만족시키기 위해 분리되거나 혹은 다른 노드와 합쳐진다.
- 루트와 잎 노드를 제외한 트리의 노드는 최소 ⌈m/2⌉개의 서브트리를 가져야 한다. 여기서 m은 차수를 의미하는데 예를 들어 m이 3이면, 내부노드는 최소 ⌈3/2⌉ = 2개의 서브트리를 가져야 한다는 뜻이다. 차수가 3이기 때문에 각각의 노드는 2개의 키를 가진다.
- 루트 노드는 최소 2개의 자식(서브 트리)을 가져야 한다.
- 트리의 모든 잎 노드는 같은 레벨에 있어야 한다. 이는 내부 노드에 있는 자식 노드의 수를 최대화함으로써 트리의 높이는 감소하며, 균형 맞춤은 덜 발생하고, 효율 증가를 가져다 준다.
- 모든 삽입은 잎 노드에서 시작해야 한다. 삽입을 할 때는 삽입할 위치를 찾기 위해 노드를 왼쪽에서 오른쪽으로 탐색하며 들어갈 자리를 찾는다. 분리가 필요하면, 노드를 2개로 분리하고 키값과 포인터를 분리한 노드에 분배한다.
- 분배 시 중간 값을 가지는 노드는 부모 노드에 삽입한다.
- 삭제를 할 때는 먼저 삭제할 키값을 가지고 있는 노드를 찾아야 한다. 그 노드가 잎 노드일 경우, 키값을 삭제하고 필요 시 노드들을 재배열한다.
- 그 노드가 내부노드일 경우, 키값을 삭제하고 잎 노드에서 삭제된 자리에 올 키 값을 옮긴다. 삭제된 자리로 옮길 잎 노드가 정해진 개수의 키 값을 갖지 않으면 트리를 재배열 한다.
B*트리
B-트리를 변형시킨 트리로서 공집합이거나 높이가 1 이상인 m원 탐색 트리이다.(m은 차수).
루트 노드가 아닌 노드는 노드의 2/3 이상이 채워져야 하는 특징이 있다. 루트노드가 가지는 자식노드의 갯수 범위는 2 ≤ x ≤ 2⌊(2m-2)/3⌋ +1 (x는 개수).
- 루트 노드와 잎노드가 아닌 노드는 최소 ⌈(2m-1)/3⌉ 개의 자식 노드를 가져야 한다. 차수가 m이기 때문에 잎노드가 아닌 노드는 포인터가 m개, 키 개수는 m-1개를 갖는다.
B*트리 또한 노드 삽입/삭제가 가능한데, 삽입 시 노드가 꽉 차더라도 바로 분리하지 않고, 키값과 포인터를 재분배하여 형제 노드로 이동시키는 구조를 갖고 있다. 만약 형제노드가 꽉 차있는 경우 노드를 분리한다.(2개 → 3개) 분리한 노드는 노드의 약 2/3가 차있어야 한다. 새로운 노드를 위해 새 메모리를 할당하는게 아니라 기존에 있는 노드로 이동시키기 때문에 '분리'보다 비용이 적게 든다.
삭제는 B-트리의 방법과 동일하지만, 삭제될 자리로 옮길 잎 노드가 정해진 개수의 키 값을 갖지 않을 때 형제 노드로부터 키 값을 재분배한다. 재분배 할 수 없는 경우 노드를 합친다(3개 → 2개).
B+트리
B-트리의 특징을 가지고 있지만, 모든 키 값들이 잎 노드에 정렬되어있는 트리 구조이다. 잎 노드를 순차적으로 연결하는 포인터 집합을 가지고 있다.
이런 특성 때문에 인덱스 된 순차 파일을 구성하는데 사용된다. 순차 처리 시 포인터를 이용할 수 있기 때문에 키 값을 모두 일일이 비교하지않고 다음 데이터에 접근해서 처리할 수 있기 때문이다.
따라서 모든 키 값은 잎 노드가 가지고 있으며, 키 값의 실제 데이터 주소도 잎 노드만 가지고 있다.
- B-트리와 동일하게 루트와 잎 노드를 제외한 트리의 노드는 최소 ⌈m/2⌉개의 서브트리를 가져야 한다. 루
- 트 노드 또한 최소 2개의 서브트리를 가져야 한다.
- 노드에 빈 자리가 있으면 삽입을 하고, 노드에 빈 자리가 없으면 노드를 분리하고 중간 값을 가진 노드를 부모 노드에 삽입한다.
- 삭제 시에는 잎 노드에서만 키 값을 삭제한다.
- 만약 삭제로 인해 잎 노드가 없어지게 되면 형제 노드를 확인해 형제 노드를 재분배해 작은 키 값을 삭제한 노드 위치에 둔다.
- 인접 형제 노드가 재분배 할 수 없으면 삭제할 키 값의 잎 노드와 형제노드를 병합한다.
B+ 트리의 검색,삽입,삭제
일반적인 노드 구조
n-1개의K와n개의 포인터 P(팬아웃)로 구성. (Pi는 Ki를 가지는 레코드(i = 1 ~ n-1))
P1 | K1 | P2 | ··· | Pn-1 | Kn-1 | Pn
노드 안의 K값은 정렬된 순서로 유지. 한 노드에 저장되는 최대 포인터의 개수는 n.
검색
검색 연산은 순차 세트에 도달하여 K에 해당하는 레코드 포인터를 획득하는 것으로 종료.
예 : K값 JPL15에 대한 검색 연산 시행
- n = 3, 탐색 시점의 노드는 Y
- Y(루트노드)를 조사해서 JPL15과 같거나 JPL15보다 큰 K 중 가장 작은 K를 찾음.
- K가 해당 노드에 아무것도 없기때문에 오른쪽 포인터를 따라가게 됨
- 중간 노드 진입, JPL15보다 큰 K 중 가장 작은 K 탐색
- 해당 K = POC12, POC12의 왼쪽 포인터를 따라감
- 단말노드 진입, 해당 노드의 처음부터 살펴서 JPL15가 있는지 확인
- JPL15가 존재하므로 JPL15의 왼쪽 포인터에 접근해 블록에 담긴 레코드 탐색
- 5번 시점에 해당 노드가 단말노드가 아니면 1부터 반복.

삽입
레코드 삽입은 새로운 K에 대한 인덱스 엔트리를 반영하는 과정.
삽입 시 해당 노드에서 유지해야 할 K와 포인터 수가 증가하는지에 따라 노드 분할 여부가 나뉨.
예시 : n = 3, K값은 ‘GGL12’만 존재. GGL22삽입 요청.
1.GGL22이 속해야 할 단말 노드 탐색. 새 K값을 저장해야 할 노드에 빈 공간이 남아있는지 탐색.
2.루트노드에 공간이 남아있으므로 삽입. 분할은 발생하지 않음.
3.노드 내의 K들의 순서 유지.
4.GGL50을 추가 삽입 요청
5.루트 노드에 저장 공간이 없으므로 분할 진행.(이유 : n= 3, 가능한 K 수 = 2)
6.분할 전 순서를 유지한 K 기준으로 부모 노드에 GGL22를 올림. (n은 3이기 때문에 1번째 index(2번째 K))
부모노드 선택 :
- ⌈n/2⌉=t 라고 정의. / t는 0부터 시작
- n 이 홀수 : 상위에 t-1 번째 index
- n 이 짝수 : 상위에 t 번째 index
자식 포인터 연결 :
- 부모노드의 왼쪽 자식노드는 부모노드보다 작게 연결 되어야 함.
- 오른쪽 자식노드는 부모노드와 같거나 크게 연결 되어야 함.
- GGL22보다 작은 GGL12가 왼쪽 자식노드(단말노드). GGL22와 GGL50은 오른쪽 자식노드(단말노드)

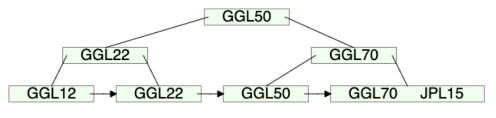
7.GGL70, JPL15를 차례대로 삽입
8.JPL15 추가 시 부모노드에 추가할 공간이 없기 때문에 부모노드 레벨에서 분할 수행.(중간노드 생성, 루트노드는 GGL50)
삭제
레코드 삭제는 삭제할 K와 포인터를 포함하는 단말노드를 검색하고 해당 K와 포인터를 삭제하는 과정.
예 : GGL70 삭제

1.GGL70 검색 후 해당 K, 연관된 포인터 삭제
2.삭제한 엔트리의 오른쪽에 있는 엔트리들은 빈 공간이 발생하지 않게 왼쪽으로 이동.
- GGL22, GGL24 차례대로 삭제
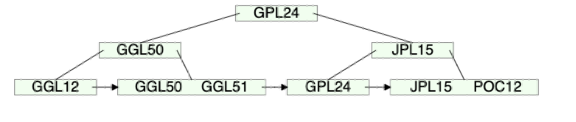
4.GGL12삭제
5.GGL12이 속한 노드가 공백상태가 됨 & K 개수도 ⌈(차수-1)/2⌉개 보다 적어짐.
6.다음 이웃 단말 노드인 GGL50, GGL51의 키를 재분배, JPL15의 부모노드를 재분배. (2번 과정 포함)
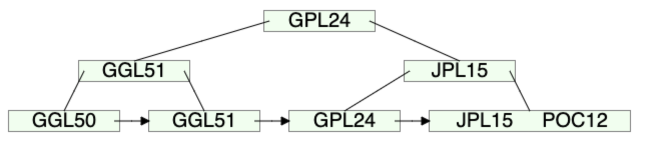
7.GPL24, POC12, JPL15를 차례대로 삭제
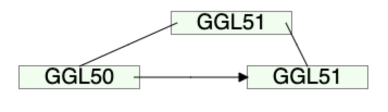
8.JPL15의 다음 이웃 단말 노드가 ⌈(n-1)/2⌉ 개보다 K값이 적음. GGL51과 이웃 단말 노드와의 병합.
4개의 댓글

너무 좋은 글 잘 읽었습니다 궁금한게 있는데
"""
인덱스를 위한 인덱스를 만들면 된다. 한 개의 블록에 32개의 인덱스가 들어가니까,
인덱스 of 인덱스에서 1번째 인덱스는 1번째 블록에 들어갈 진입포인트, 2번째 인덱스는 2번째 블록에 들어갈 진입포인트... 등으로 구성한다.
인덱스 of 인덱스는 2개의 블록으로 구성된다.
즉, 총 필요한 블록은 92 블록이다.
"""
위 설명에서 1000개의 레코드를 저장하기 위해선 250개의 블록이 필요하겠죠?
인덱스는 1000개 레코드에 대한 eid와 pointer를 저장해야합니다. (eid 8byte, pointer 8byte가정) 1 블록에는 32개의 인덱스가 있고, 1000개의 레코드를 가리키려면 (블록의 수 = 1000/32 =32) 32개의 인덱스 블록이 있어야하는것은 이해했습니다!
32개의 인덱스 블록 중 하나를 찾기 위해선 인덱스 of 인덱스가 필요하니 1블록의 인덱스 블록 (32개의 인덱스를 가리키는 인덱스) 를 더해서 (250레코드 블록 + 32인덱스 블록 + 1인덱스of인덱스 블록)총 283개의 블록이 있는거 아닌가요?
제가 이해한게 틀렸을까요?? 왜 92개의 블록인지 궁금합니다!!
좋은글이네요 감사합니다.