Chapter 01. Intro
real world issues
- Accuracy and Reliablity
- Change Enviroment
- data Scarcity
- Computational cost
Chapter 03. Sensors
single RGB
rolling shutter effect
streo RGB
NIR 적외선
LiDAR
거리 측정 값이 매우 정확함
수분 입자에 영향을 많이 받음
RADAR
환경변화에 강인함
도플러 주파수로 속도 정보 획득 가능
거리탑지 성능 높음
Ultrasonic
Thermal
black body
structed Light
Chapter 04. Camera Models
Pinhole camera
- 바늘구멍 사진기
- 상이 거꾸로 맺힘
- 가장 기초적인 카메라 모델
Camera Model
- focal length
- principal point
- lens distortions
Intrinsic Parameter
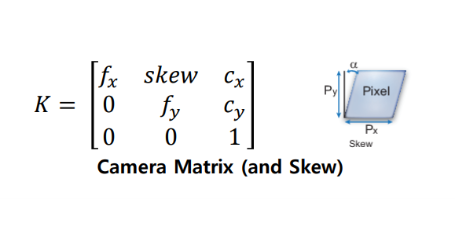
fx, fy : focal lengths. 픽셀 사이즈의 가로, 세로가 같이면 fx=fy
cx, cy : principle point. 주점. optical center 좌표
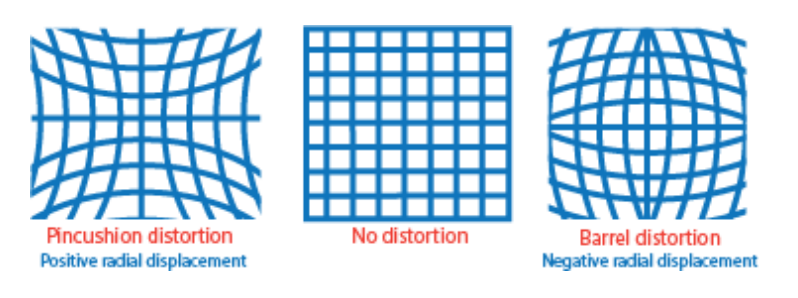
Distortion
Radial Distortion
- Barrel distortion : 볼록 렌즈 왜곡
- Pincushion distortion : 오목 렌즈 왜곡
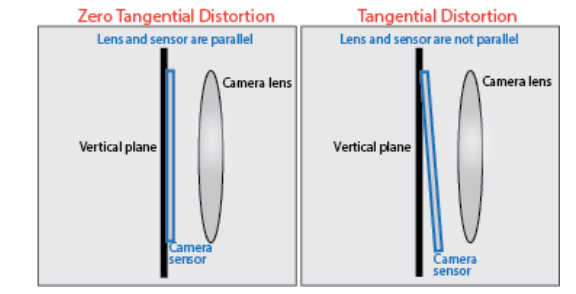
Tangential Distortion
Camera Exposure
Aperture
조리개
큰 핀홀 : averaging image blur
작은 핀홀 : diffraction image blur
Depth of Field
심도
chromatic Aberration
색수차
vinetting
Image Sensing Pipeline
optical - aperture - shutter - sensor - gain - ADC
- demosaic - denoise and sharpen - white balance - gamma/curve - compress
Chapter 5

Learning Mate