[4D Gaussian Splatting for Real-Time Dynamic Scene Rendering]([2310.08528] 4D Gaussian Splatting for Real-Time Dynamic Scene Rendering) (Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, Xinggang Wang / CVPR 2024)
Real-time dynamic scene rendering 연구
- Deformation network 활용해서 gaussian splat을 시간별로 deform하고 splat하는 방식
Problem
- 3DGS는 static scene을 가정하기 때문에, dynamic scene에서는 잘 작동하지 않음
→ Real-time dynamic scene rendering을 하고자 함
- Time t마다 scene을 저장할 수는 없음.
→ Dynamic scene rendering을 하려면 time 축에 대한 고려가 필수적
-
그리고 이러한 dynamic scene rendering의 training 및 rendering 효율성을 최대화 하고자 함
-
3DGS preliminary : [3DGS 이전 포스팅 short summary 참고](3D Gaussian Splatting for Real-Time Radiance Field Rendering 리뷰)
Methodology
Dynamic scene rendering 방법
- NeRF의 경우 dynamic scene을 다루려는 연구가 이전에도 있었음.
-
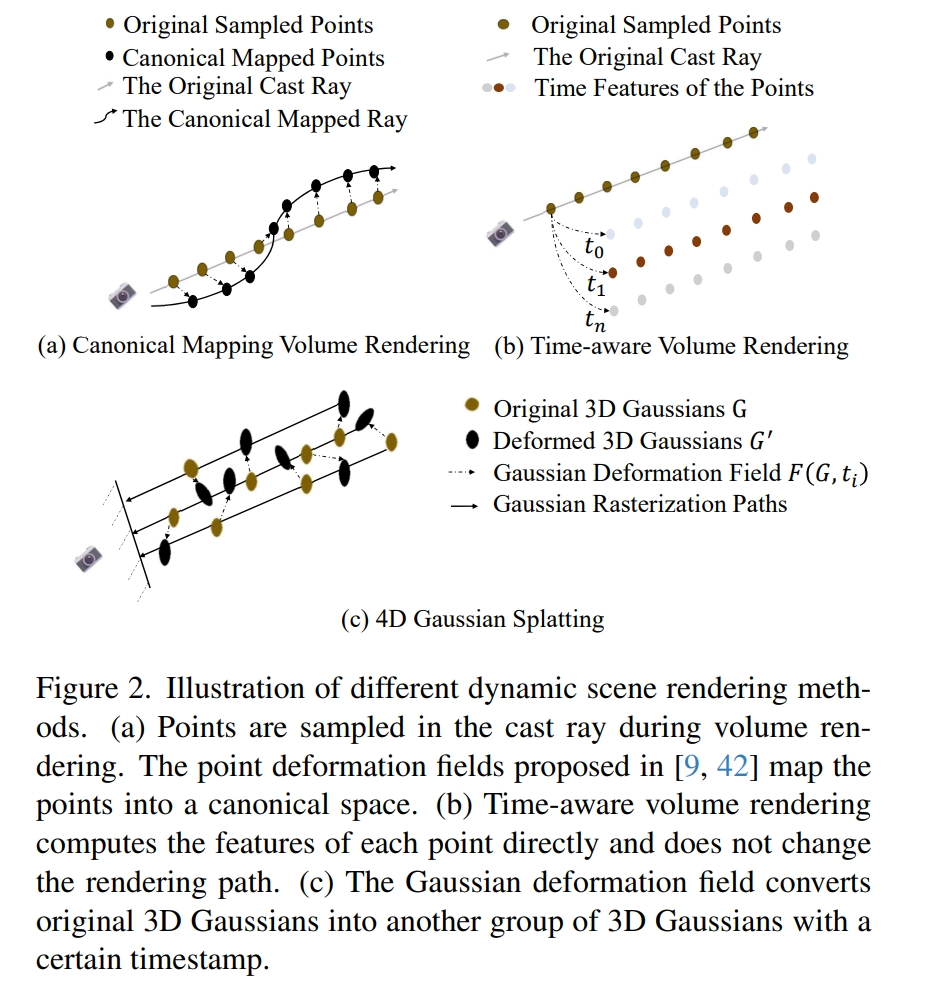
먼저 (a)와 같이
deformation field를 학습하여 ray point들을 time마다 다르게 mapping하여 rendering하는 경우가 있고,
- (b)와 같이 time마다 point feature를 다르게 추출하여 rendering하는 방식이 있었음
⇒ 이 연구는 deformation field의 철학을 따르나, Dynamic NeRF에서의 deformation과는 조금 다른 방법을 활용
Dynamic NeRF는 현재 시점의 좌표가 과거의 어디였을까를 계산 (World-to-Canonical)-
t 에서 ray를 쏘고 point sample하면, deformation network가 이 점들을 각각 canonical space로 역매핑 ()
☑️ 하나의 픽셀 그리기 위해 모든 점에 대해 이 계산 필요 → rendering이 느려짐
-
4DGS는 표준 상태 (canonical)의 gaussian들이 t에서 어디로 가야 할까를 계산 (Canonical-to-World)-
하나의 표준 가우시안 세트 가 있으면 deformation network가 로 직접 변형
-
그리고 그냥 그대로 splatting하면 됨.
☑️ real-time rendering이 가능함.
-
4D Gaussian Splatting Framework
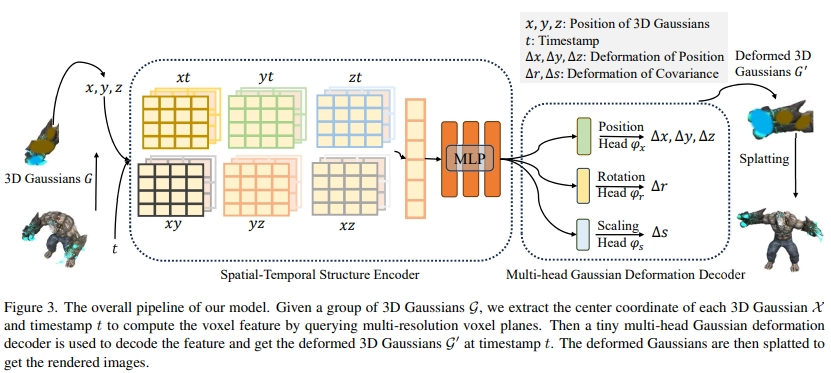
-
4D gaussian splatting은
3D gaussian와Gaussian deformation field network로 이루어져 있음. -
Novel-view rendering은 단순히 deformed gaussian으로 differential splatting 수행하면 가능
-
Gaussian의 deformation을 deformation network가 출력
-
실제 Deformation Field Network가 어떻게 구현되었는지는 생략
Spatial-Temporal Sturcture EncoderMulti-head Gaussian Deformation Decoder
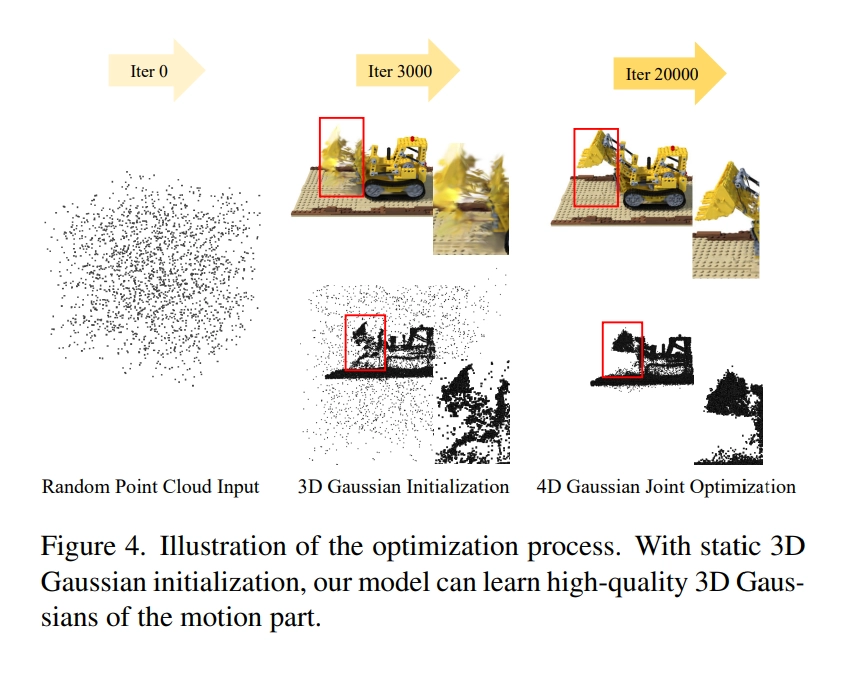
-
최적화 시에는 3DGS를 활용해서 initialization
Experiments
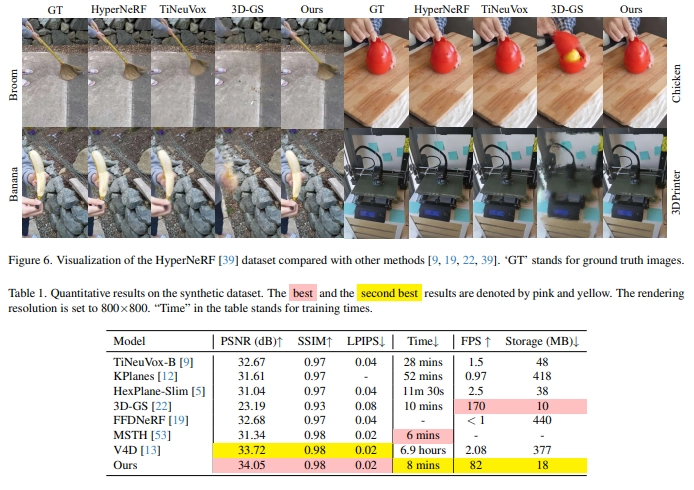
-
RTX 3090 GPU로 800x800 resolution 82 FPS까지 나온다고 함.,
-
결과는 project page에서 영상으로 보는게 나을 것 같음
Limitations
-
급격한 움직임이나 배경이 부족한 경우, camera pose가 부정확할 경우 4d gaussian 최적화가 잘 안된다고 함.
-
Monocular setting의 경우, 카메라가 움직이는건지 물체가 움직이는 건지 구분하기가 어렵기 때문에 별도의 supervision이 없으면 4DGS 학습이 어려움
-
이 연구에서는 모든 가우시안 객체가 deformation network를 통과해야하기 때문에 3D gaussian이 엄청 많아지는 scene을 recon하기에는 어려움
