Paper : Auto Filmer: Autonomous Aerial Videography Under Human Interaction (Zhiwei Zhang; Yuhang Zhong; Junlong Guo; Qianhao Wang; Chao Xu; Fei Gao / IEEE RAL 2023)
code: https://github.com/ZJU-FAST-Lab/Auto-Filmer/tree/main?tab=readme-ov-file
Highlights
- Customized shot (shooting rules)과 drone dynamics (motion)를 결합한 자율 비행 interactive videography system 제시 → Real-time으로 원하는 촬영 구도를 설정할 수 있음
- Shooting demands를 만족하면서 충돌과 가려짐이 없는 초기 경로를 찾는 front-end process
- Stable video frame을 가능케하도록 drone과 gimbal을 동시에 최적화
→ 기존의 trajectory planning 연구에서 shot constraint를 추가한 것이 핵심
Introduction
- Aerial videography는 cinematography 등 여러 분야에서 사용되지만, 실제로 uav를 통해 대상을 촬영하는 것은 매우 어려움 → 예를 들어 조종기로 조작 시에 움직임은 linear하지만 circular motion 등은 실제로 non-linear trajectory를 구현해야 함 → 짐벌을 같이 조종하는 것은 더 어려운 일. → 동시에 대상까지 추적해야 한다.
-
최근에는 여러 vision recognition 연구와 motion planning 연구를 통해서 UAV가 자동으로 따라다니면서 촬영하는 시도가 많이 있었지만, 아직 촬영의 미적인 요소나 human interaction을 고려한 연구는 많이 없음 (Elastic-Tracker 등의 aerial tracker도 매우 성능이 좋긴 함)
-
이러한 사람들의 촬영 요소에 대한 요구를 robot motion으로 반영하는 것이 어려운 일
- robot의 움직임에는 여러 공간적 제약이 존재 (장애물, 가려짐 등)
- robot의 motion 자체로 인해 촬영 구도가 변할 수 있음 (image 에서 보이는 타겟의 위치 등)
-
해당 연구인
Auto Filmer은 촬영자의 촬영 조건 등을 실시간으로 고려하여 robot trajectory planning을 수행하는 interative videography system -
이 trajectory planning은 hierarchical planning scheme을 가짐
- front-end process
- robot의 initial path를 생성하기 위한 몇 개의 점들을 추출
- Initial path 주변으로 드론이 위치해야하는 region을 정의 → 이 region은 videography requirements를 만족하면서 drone의 safety와 target에 대한 visibility를 고려한 region
- back-end trajectory optimization
- 위에서 생성한 potential region을 바탕으로 최적의 trajectory 생성
- front-end process
Prerequisites
Videography Interaction
-
videography에서 중요한 세 가지 factors
- shot length
- perspective
- image composition (촬영 화면 안에서 물체들의 layout과 관련된 것들)
- + transition time (얼마나 빠르게 한 촬영 패턴에서 다른 촬영 패턴으로 넘어가는지)
-
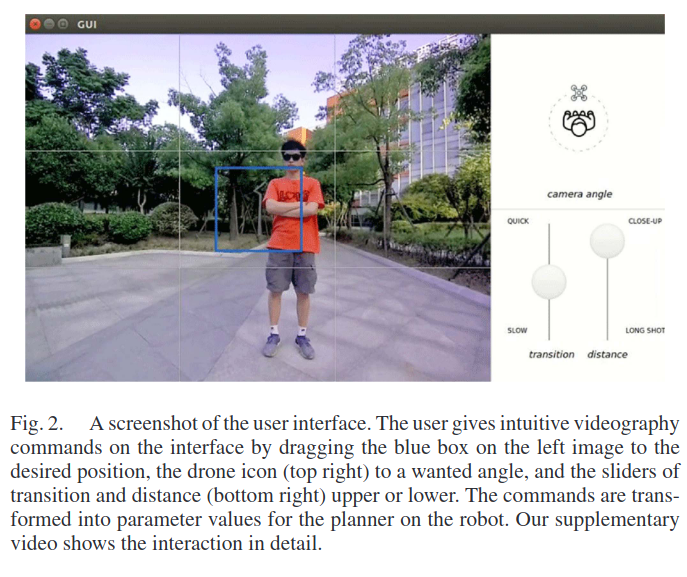
이러한 videography 요소들을 수학식으로 표현하기 위해서 아래의 parameter들이 필요
- 이미지 상에서 물체의 위치와 속도
- 드론과 타겟의 상대적인 각도
- 카메라와 타겟의 거리
- Transition Time
→ 이는 아래의 GUI처럼 표현할 수 있음
- 해당 방법론의 계획 단계에서, 위의
videography parameter는 매 time stamp마다 할당되는 값 → 이 파라미터들이 촬영 모드를 정의한다고 볼 수 있을 듯
- 특히 이 과정은 두 단계로 나뉨
-
Stable stage: 드론이 타겟을 고정된 패턴을 유지하면서 타겟을 촬영→ 는 constant, 는 0을 가짐
-
Transition state: 이전 촬영 configuration에서 새로 지정된 config로 촬영 frame이 변화하는 과정.→ 이 state에서 parameter들은 시간에 따라 interpolate됨
→ 는 constant
-
Hardware
-
Videography platform은 같은 연구실의 FAST-TRACKER를 따랐다고 한다.
-
자율주행 videography 시스템에서 visual perception은 두 가지 중요한 역할을 수행
Environment sensing: 장애물 회피 등을 위해 mapping하는 역할Target tracking: 타겟을 추적하는 역할
-
해당 연구에서는 mapping을 위한 depth camera와 촬영을 위한 monocular camera를 따로 사용했다고 한다.
-
또한 짐벌은 yaw방향 회전을 하는 것을 사용
→ 구현해놓은 것 보면 드론의 heading은 velocity방향이고, 실제로 타겟을 tracking하는 것은 짐벌의 몫. (Depth camera가 앞을 바라보고 있어야 mapping하면서 장애물 회피 가능하므로) -
안정적인 frame을 담기 위해 gimbal motion도 함께 계획
Front-End Process
- 제안된 framework의 front-end 파트는 trajectory optimization에 필요한 여러 조건들을 설계한다.
- Videography 조건을 만족하면서 Kinodynamic constraints를 만족하는 path를 탐색 (collision-free motions with dynamic limits)
- 타겟의 visibility를 보장하기 위해, initial path를 따라 view regions를 생성
- 드론의 안전성을 보장하기 위해 safe flight corridors 생성
Kinodynamic Path Searching
-
Hybrid A* path search 알고리즘을 사용
-
각 node는 robot state를 represent하며, A star와 비슷하게 각 node에는 출발지부터 현재까지의 effort인 cost function 과 도착지까지 effort estimate인 heuristic function 이 할당됌
-
하지만 목적지까지 가장 짧은 경로를 찾는 대신, 해당 연구의 videography kinodynamic search는 주어진 videography parameter와 차이를 가장 적게하는 경로를 찾음
- safe & occlusion-free path
- 즉, videography parameter를 만족하도록 하는 drone state를 goal point로 여기고 최적의 path를 찾는다고 이해하자.
-
여기서 planner는 target motion의 미래 information을 필요로 한다.
-
이때 target의 motion을 예측하는 prediction module이 필요한데, 이는 motion model을 활용한 kalman filter를 활용하든, deep learning model을 활용하면 될 것 같다.
→ 이 논문의 scope는 아님.
-
어쨋든 prediction module은 아래의 정보를 줄 수 있어야 한다.
- target의 predicted position
- target의 predicted velocity
- 은 prediction points, 는 horizon (→ 즉 현재로부터 앞으로 정해진 time 동안 예측)
-
경로 탐색을 하는 동안, node들은 이 prediction과 같은 시간 간격으로 확장되어간다.
→ 그러므로 각 노드 에 대해 현 시간 에서 드론의 state뿐만 아니라 target의 위치 이 필요하다.
- 그러면 현재 드론의 position으로부터 target을 가르키는 벡터를 아래와 같이 정의할 수 있다.
- 그리고 관련된 videography factor들은 아래와 같이 계산된다. (는 타겟을 볼 때의 tilt angle)
- 위의 값들을 Prerequisites에서 언급했던 videography parameter들이 각 time 마다 할당되어 있으므로, 각 node의 cost function은 user-assigned shooting parameter와의 차이로 정의할 수 있다.
- 는 cost weights
- 여기서 desired tilt angle 는 아래와 같이 구해줄 수 있다. (는 camera intrinsic)
- Search process는 graph가 target prediction 에 도달하면 종료.
- Heuristic function은 searching을 빠르게 하기 위해서 시간 차로 설정
- 또한, 이 연구에서는 velocity control input을 사용하는데, primitives 값을 활용하여 각 방향으로 확장 가능한 노드들을 선별 (예를 들어, 방향으로 최고 속도 , 나머지 방향 y, z로는 0 velocity를 가지는 경우가 한 노드라고 생각) → 즉, 한번의 node expansion에 가지의 새 node (state)들을 고려 → 물론 장애물 등을 고려해서 불가능한 state는 제외
View Region Selection
- Kinodynamic search를 통해 얻은 경로 (waypoint)는 아직 optimal solution을 제공하지는 못함 → visibility를 보장하기 위해 view region이라는 영역을 추출
-
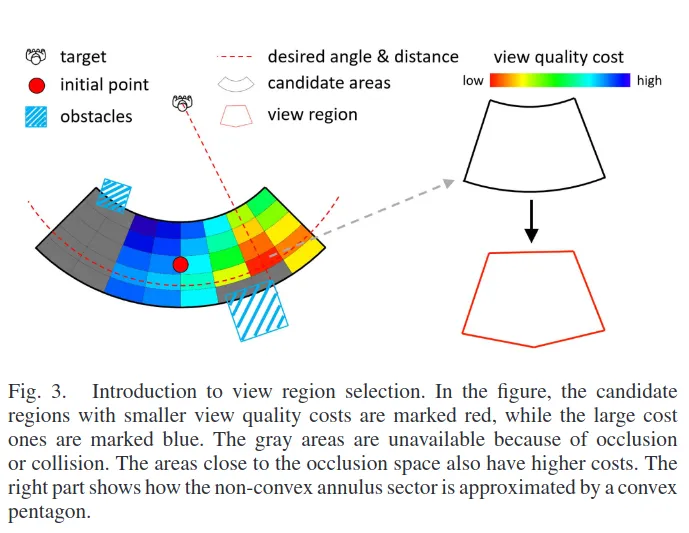
View Region을 생성하기 위해서 다음의 작업이 수행된다. (위 그림 참조)
-
먼저, 드론의 dynamic limit을 기반으로 각 time 에서 initial point로부터 adjustable한 영역을 추출한다.
-
Videography 특성상 video quality는 distance와 perspective의 영향을 크게 받으므로, voxel이 아닌 고리 형태로 이 영역을 여러 후보로 잘게 나눈다. (예를 들어 후보 영역 중 빨간색 영역은 그림에서 보다시피 특정 거리와 각도를 포함하는 영역)
-
각 영역은 타겟에 상대적으로 특정 거리와 각도를 가지게 되는데, 이 값들의 medium 값을 기반으로 아래의 evaluation 함수 를 계산할 수 있다.
-
여기서 마지막 term이 장애물에 가려지는 것에 대한 visibility를 측정해주며, occlusion angle 는 ray-casting을 통해 정해질 수 있는 각
-
장애물 등에 의해서 가려지는 영역은 후보는 제외하고, 최소의 를 갖는 후보 area가 view region으로 선택된다.
-
선택된 view region은 이후 최적화를 위해 convex area로 approximate된다.
-
이 연구에서는 이를 polytope로 표현
Corridor Construction
- View region은 특정 prediction time에서 촬영 위치를 결정하지만, 전체적인 경로의 safety가 보장되지는 않음 → Elastic-Tracker의 safe flight corridor construction 방법을 사용 (추후 요 논문도 정리하려고 함)
- A*를 이용해 각 view region의 center를 연결하고, 이를 바탕으로 obstacle-free한 polyhedron을 생성한다. (아래 그림과 같은 식이라고 보면 될 것 같다.)
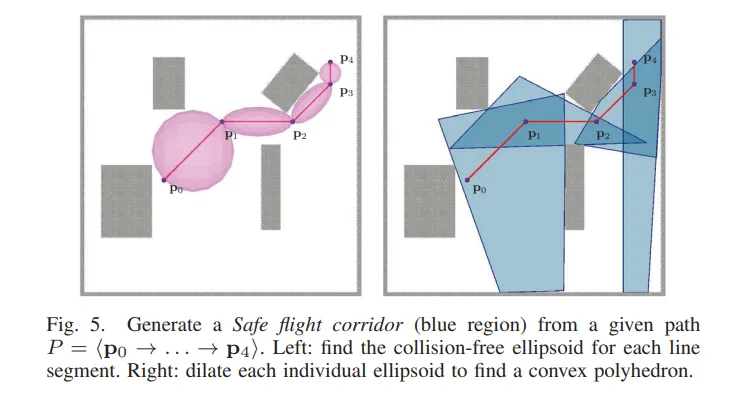
출처: Planning Dynamically Feasible Trajectories for Quadrotors Using Safe Flight Corridors in 3-D Complex Environments
- 이러한 flight corridor는 polyhedra로 표현
Trajectory Optimization
Trajectory Representation
- 이 연구에서는
MINCO trajectory class를 활용하여 드론의 trajectory를 표현하고 최적화한다. - MINCO는 Trajectory with Minimum Control (논문 ref: Geometrically Constrained Trajectory Optimization for Multicopters)로, 드론의 motion을 polynomical segments로 표현하며, 최소 control을 사용하는 optimal trajectory를 최적화하는 방법론. (나중에 공부!!)
- 개의 polynomial trajectory (segments) =
- : intermediate points
- : 각 polynomial의 time duration
- : trajectory polynomial의 coefficient → 의 함수로 구할 수 있음 → 이렇게 표현하면 전체 trajectory를 intermediate point 와 time interval 로 표현할 수 있게 되서 computational efficiency가 향상
** 최적화에서 최적화하는 변수는 와 !!
- 번째 segment trajectory는 그러면 아래와 같이 의 degree를 갖는 polynomial
-
여기서 은 계수 행렬
-
는 natural basis
-
이러한 trajectory의 생성 과정은 아래의 multi-objective 최적화 문제를 풀어서 진행
-
는 각각의 constraint violation을 포함하는 cost function
-
는 cost term의 weight
-
은 polynomial pieces의 갯수
-
은 prediction points의 갯수
-
: smoothness cost로, trajectory로부터 바로 계산되는 값
-
뒤의 두개 term은 해당 방법론에서 최적화의 inequality constraint 에 관련되는 term들
-
일 때만 cost가 적용되고 아니면 0
-
이러한 constraint는 두 가지로 나뉨
- drone 자체로 인한 constraints ()
- target과 관련된 constraints ()
-
Drone Induced constraints
- 시간에 따른 적분을 통해 penalty를 계산. 는 사다리꼴 공식으로 적분하기 위한 계수들
- 는 sampling된 points
- max() 를 보면 일 때만 계산된다는 것을 알 수 있음
- Target-associated Constraints
- absolute time에서 penalty를 계산
- 는 번째 polynomial piece에 위치한 번째 prediction time
-
해당 연구에서는 robot translation 를 표현하기 위해 trajectory를 활용하였고, drone yaw angle 와 gimbal angle 를 표현하기 위해 를 활용했다고 한다.
-
이제 각각의 constraint에는 어떤 것이 있는지 확인해보자.
Dynamic Constraints
- Quadrotor의 differential flatness에 의하면 드론의 state와 input은 flat output들에 의해 표현될 수 있기 때문에, vel, acc, att, bodyrate가 직접적으로 trajectory로부터 계산될 수 있다고 한다.
- 는 differential flatness mapping 함수로, 최적화 시, 이 함수의 역함수로 gradient를 propagate시킬 수 있다.
** Differential flatness
-
한 시스템에서 어떤 flat output이 있어서, 시스템의 모든 state와 input을 이 flat output들과 이의 미분들의 smooth function으로 표현할 수 있다면 differentially flat하다고 한다.
-
Quadrotor에서 이러한 flat output은 position (x,y,z)와 yaw와 그 미분들 (vel, acc, jerk, yaw rate), 이를 통해 state 와 input (torque, thrust, …)를 표현할 수 있음
-
이렇게 하면, 내가 원하는 output을 specify하면 이를 달성하기 위한 control input을 직접적으로 구할 수 있게 된다.
-
즉, planning이나 optimize 시, 드론의 nonlinear dynamic를 explicit하게 다룰 필요가 없어진다.
-
또한 optimization을 수행 시, cost function에 대한 state나 input의 gradient를 flat output들로 propagate할 때, flatness mapping 함수의 역함수를 활용할 수 있는것이다.
- quarotor와 gimbal rate의 physical constraint는 아래와 같이 쓸 수 있다.
Safety Constraints
- 먼저, trajectory가 collision free해야 하기 때문에, 드론의 position이 frone-end에서 구한 polyhedon안에 위치해야한다.
- 또한, mapping이 되지 않은 영역을 탐색할 때에 mapping을 하기 위해서 드론의 heading이 velocity direction과 align되어야 한다. (특정 threshold보다 차이가 작도록)
Videography Constraints
- 위에서 View Region에서 언급했듯이, shooting angle 와 distance 는 view region 에 의해 handling. → 그러므로 최적화 중에는 드론의 position이 아래와 같은 polyhedron으로 constrained
-
또 다른 videography parameter인 는 state variables 에 의해 결정된다.
-
Camera frame에서 물체의 위치 는 아래와 같이 구해질 수 있다.
-
는 body attitude quaternion 로부터 구해질 수 있고,
-
는 gimbal rotation 로부터 구해질 수 있다.
-
는 이미 알고 있는 값 (translation)
-
Pinhole camera model을 가정하면, (Intrinsic known)
- 위의 식에서 projected velocity 를 구하기 위해 를 미분하면, (는 skew-symmetric matrix)
- 이때, pixel value에서 발생하는 너무 큰 cost로 인한 문제를 해결하기 위해 sigmoid 함수를 사용 → 그러면 image position과 image velocity에 대한 cost는 아래와 같이 쓸 수 있음
Code study
https://github.com/ZJU-FAST-Lab/Auto-Filmer/tree/main?tab=readme-ov-file
-
FASTLAB의 연구들 코드 베이스는 거의 다 비슷하다.
-
보통 크게는 아래와 같은 구조로 이루어져 있다.
- Target motion prediction model : 보통 bbox 기반으로 위치 추정
- mapping : Depth map을 기반으로 gridmap을 생성한다.
- planning : 가장 메인이 되는 파트로, 드론과 타겟의 odometry, 여러 정보 (map 등)를 추합하여 trajectory planning을 수행
- traj_server : planning에서 만들어진 trajectory를 적절한 position cmd로 바꿔준다.
- uav_simulator : so3_quadrotor & so3_controller로 이루어져 있으며, 시뮬레이션 드론을 만들어 쓴다. position cmd를 받고 실제로 움직임을 simulate해서 odom을 보내준다.
- odom_visualization : rviz에 odom 보여주기 위한 파트
-
다른 부분은 거의 공통적이고,
planning이 연구의 메인
Planning_nodelet.cpp
- Core code →
planning_nodelet.cpp: front-end planning + back-end optimization + mapping + target tracking
- Subscribed topics
- odom
- gimbal
- gridmap_inflate
- trigger
- shot
- target
plan_timer_callback()→ main trajectory planning function
Shared pointers
planning_nodelet.cpp에 사용되는 여러 모듈들
gridmapPtr_ = std::make_shared<mapping::OccGridMap>();
envPtr_ = std::make_shared<env::Env>(nh, gridmapPtr_);
pathPtr_ = std::make_shared<path::PathSearch>(nh, gridmapPtr_);
visPtr_ = std::make_shared<visualization::Visualization>(nh);
trajOptPtr_ = std::make_shared<traj_opt::TrajOpt>(nh);
prePtr_ = std::make_shared<prediction::Predict>(nh);
shotPtr_ = std::make_shared<shot::ShotGenerator>(nh);plan_timer_callback() : planning process
- planning_nodelet.cpp의 main 함수
-
subscribed topics 확인
- odom : odom_p, odom_v, odom_q → yaw = atan2(odom_q .y, odom_q .x)
- gimbal : gimbal_states (angle, rate)
- map : gridmapPtr
- target : target_p, target_v
- shot : shot configuration
- odom : odom_p, odom_v, odom_q → yaw = atan2(odom_q .y, odom_q .x)
-
ReplanState
- planning 상태를 tracking하기 위한 메세지
- 아래의 정보를 담고 있음
- drone의 current state
- target의 predicted state
- gridmap
-
Shotconfig generation
- predict_n만큼 shotconfig를 생성
shotPtr_ -> generate(shotcfg_list, predict_n);- 설정한 transition time동안 n개의 configuration을 생성
- 기존의 config부터 desired config까지 interpolation해서 n-prediction동안 필요한 configuration을 설정
-
Predict target state
predict_n만큼 predict
prePtr_->predict(target_p, target_v, target_predcit, target_vels);:
prePtr은 target prediction module- target의 위치와 속도를 예측
- predict target yaw : target의 예측된 속도를 이용해 target yaw를 계산, 이를 target_headings로
-
Kinodynamic A-star
generate_new_traj_success = pathPtr_->findPath(target_predcit, target_headings, shotcfg_list, iniState.col(0), iniState.col(1), kAstar_path);kAstar_path라는 3d vector에 담김- target의 predicted position, heading 과 shotconfig를 input으로 받고, A-star trajectory를 계산
- Astar topic → x,y,z positions
- A-star cost
-
논문 내용과 동일하게 타겟과 드론의 상대적인 벡터를 기반으로 distance, tilt, angle을 계산하여 사용
-
여기서, angle은 상대적인 위치 벡터를 기반으로 고려하기 때문에 orientation은 아직 영향을 주지 않음
inline double score(const Eigen::Vector3d& p, const Eigen::Vector3d& target, const double& target_yaw, const shot::ShotConfig& shotcfg) { double d, angle, des_d, des_angle, delta_angle, best_tilt, des_z; Eigen::Vector3d dp = p - target; // 1. distance des_d = shotcfg.distance; d = dp.norm(); // 2. tilt best_tilt = atan((shotcfg.image_p(1) - cy_) / fy_); des_z = target.z() + shotcfg.distance * sin(best_tilt); // if ground limits, then best_z is clearance_d_ // if(des_z < clearance_d_) // des_z = clearance_d_; // des_tilt = asin((des_z - target.z()) / shotcfg.distance); // tilt = asin(dp(2) / d); // 3. pan angle = std::atan2(dp(1), dp(0)); des_angle = shotcfg.view_angle + target_yaw; delta_angle = fabs(des_angle - angle); while(delta_angle > 2*M_PI) delta_angle -= 2*M_PI; delta_angle = std::min(delta_angle , 2*M_PI - delta_angle); return lambda_cost * (fabs(d - des_d) + lambda_theta * delta_angle + lambda_z * fabs(p.z() - des_z)); }
-
-
View Region Construction
generate_new_traj_success = envPtr_->generate_view_regions(target_predcit, target_headings, shotcfg_list, kAstar_path, visible_ps, view_polys);- initial path를 기준으로
visible_ps,view_polys를 생성 - visible_ps를 기반으로 view_polys (ploytope)를 만드는 것
- 여기서도 마찬가지로 target에 대한 visibility를 보장하는 view region에 대해 드론의 position을 constraint하는 부분이기 때문에, orientation은 영향을 주지 않음
- initial path를 기준으로
-
replan decision
- 현재까지의 과정에서 replan 여부 결정
- 드론의 속도와 타겟 속도가 낮을 때
- visible ps와 현재 드론 위치가 충분히 가까울 때
- 현재까지의 과정에서 replan 여부 결정
-
Corridor Generation
envPtr_->pts2path(visible_ps, path); envPtr_->generateSFC(path, 2.0, hPolys, keyPts);- visible_ps를 기반으로 path를 생성
- 그 path를 기반으로 safe flight corridor (polyhedron) 생성 →
hPolys
-
Trajectory Optimization
generate_new_traj_success = trajOptPtr_->generate_traj(iniState, finState, iniAngle, target_predcit, target_vels, view_polys, des_pos_image, des_vel_image, hPolys, traj); pub_traj(traj, replan_stamp);- initial path를 기반으로 MINCO polynomial trajectory 생성
initState는 [odom_p, vel, acc , jerk] (column vector 4개 → 3x4 mat)initAngle은 [[now_yaw, 0],[gimbal angle, gimbal rate]] (2x2 mat)finState는 [path.back(), target_v, 0, 0] (col vec 4개 → 3x4 mat)des_pos_image&des_vel_image는 shot config로부터 받아온 값- output :
traj→ x,y,z,psi,theta,duration 의 sequence
Optimization
trajOptPtr의 main 함수인generate_traj에서 initial trajectory와 input states를 통해 최적화된 경로 계획
bool TrajOpt::generate_traj(const Eigen::MatrixXd& iniState,
const Eigen::MatrixXd& finState,
const Eigen::MatrixXd& iniAngle,
const std::vector<Eigen::Vector3d>& target_predcit,
const std::vector<Eigen::Vector3d>& target_vels,
const std::vector<Eigen::MatrixXd>& view_polys,
const std::vector<Eigen::Vector2d>& des_pos_image,
const std::vector<Eigen::Vector2d>& des_vel_image,
const std::vector<Eigen::MatrixXd>& hPolys,
Trajectory& traj) {
...
setBoundConds(iniState, finState, iniAngle);
...
int opt_ret = optimize();
...
mincoOpt_.setParameters(P, psi_, theta_, T);
mincoOpt_.getTrajectory(traj);
...
setBoundConds함수 : 최적화시 initial, final boundary condition을 설정- 먼저 initState와 finState의 velocity, acceleration이 정해진 limit을 넘어가지 않도록
- initial & final yaw 설정 :
setAngleInitValue()-
drone yaw : control point position을 기반으로 를 활용한 velocity direction으로
interYaw를 계산 -
gimbal yaw : target에 heading을 맞추기 위해 target의 위치와 내 위치의 각도를 atan2로
interTheta계산→ iniAngle과 finAngle도 똑같이 선언
-
mincoOpt_에 condition set
void TrajOpt::setBoundConds(const Eigen::MatrixXd& iniState,
const Eigen::MatrixXd& finState,
const Eigen::MatrixXd& iniAngle) {
...
initS.col(1) *= tempNorm > vmax_ ? (vmax_ / tempNorm) : 1.0;
tempNorm = finalS.col(1).norm();
finalS.col(1) *= tempNorm > vmax_ ? (vmax_ / tempNorm) : 1.0;
tempNorm = initS.col(2).norm();
initS.col(2) *= tempNorm > amax_ ? (amax_ / tempNorm) : 1.0;
tempNorm = finalS.col(2).norm();
finalS.col(2) *= tempNorm > amax_ ? (amax_ / tempNorm) : 1.0;
...
setAngleInitValue(iniAngle, T, P, finPos, iniAngleAdjust, finAngleAdjust, interAngle);
...
mincoOpt_.setConditions(initS, finalS, iniAngleAdjust, finAngleAdjust, N_);
...
}Optimize함수- optimize 수행
- L-BFGS (limited-memory broyden-fletcher-goldfarb-shanno) solver는 flat array
x_를 필요로 함 t, p, psi, theta는x_를 각각 특정 slice별로 map시킨 변수들- 초기값은
t_, p_, psi_, theta_로 넣어줌 - optimize를 마친 후,
x_값을t_, p_, psi_, theta_에 넣어줌 objectiveFunc함수에 cost, grad 정의- grad propagate를 통한 최적화 변수 update
int TrajOpt::optimize(const double& delta) {
...
Eigen::Map<Eigen::VectorXd> t(x_, dim_t_);
Eigen::Map<Eigen::VectorXd> p(x_ + dim_t_, dim_p_);
Eigen::Map<Eigen::VectorXd> psi(x_ + dim_t_ + dim_p_, dim_psi_);
Eigen::Map<Eigen::VectorXd> theta(x_ + dim_t_ + dim_p_ + dim_psi_, dim_theta_);
t = t_;
p = p_;
psi = psi_;
theta = theta_;
...
auto ret = lbfgs::lbfgs_optimize(dim_t_ + dim_p_ + dim_psi_ + dim_theta_ + 1, x_, &minObjective,
&objectiveFunc, nullptr,
&earlyExit, this, &lbfgs_params);
...
t_ = t;
p_ = p;
psi_ = psi;
theta_ = theta;
return ret;
}
objectiveFunc- optimize하기 위한 cost를 계산하기 위한 함수
- cost를 바탕으로 각 variable의 gradient를 계산
static inline double objectiveFunc(void* ptrObj,
const double* x,
double* grad,
const int n) {
...
obj.dbg_msg.cost_smooth = cost;
obj.mincoOpt_.getEnergy(cost, obj.rhoSmooth_);
...
// this function add intergral penalty like pos, vel and acc
obj.addTimeIntPenalty(T, b, b_angle, cost, obj.partialGradByTimes,
obj.partialGradByCoeffs, obj.partialGradByCoeffsAngle, obj.flatmap_);
obj.addTimeCost(T, b, b_angle, cost, obj.partialGradByTimes, obj.partialGradByCoeffs,
obj.partialGradByCoeffsAngle, obj.flatmap_);
obj.mincoOpt_.propogateGrad(obj.partialGradByCoeffs, obj.partialGradByCoeffsAngle, obj.partialGradByTimes,
obj.gradByPoints, obj.gradByAngles, obj.gradByTimes);
...
}addTimeIntPenalty: 논문에서 time integral penalty에 해당- corridor cost (
cost_corridor) : drone이 polyhedron안에 위치하도록 (related : clearance_d) - velocity, acceleration, angular rate (
cost_v, cost_a, cost_omg) : limit 값을 지키도록 (related : vmax, amax, ratemax) - safety (
cost_mapping) : 드론의 yaw와 heading이 같은 방향을 가르키도록 (related : rhoMapping)
- corridor cost (
addTimeCost: 논문에서 absolute time penalty에 해당- view region cost (
cost_view) : view region안으로 들어오도록 (related : rhoViewPos - actor safety (
cost_actor_safe) : drone이 target와 일정 수준의 거리를 유지 하도록 (related : rhoNoKilling) - visiblity (
cost_visibility) : image plane 내에서 보이는 타겟이 원하는 위치와 속도를 가지도록 (related : rhoVisibilityPos, rhoVisibilityVel)
- view region cost (
Discussion
- shot parameter를 만족하도록 경로를 최적화하는 연구.
- ZJU FASTLAB의 다양한 uav tracker (Elastic Tracker, Fast Tracker 등) 여러 연구와 framework가 비슷해서 한번 코드 structure를 알아두면 재 사용하기가 편하다.
- 그리고 해당 연구들은 trajectory를 표현하고 최적화하는데 있어서 MINCO trajectory class (Geometrically Constrained Trajectory Optimization for Multicopters) 를 사용하는데, 나중에 각잡고 공부해보는 것도 좋을 것 같다. (너무 어려워서…)
- https://github.com/ZJU-FAST-Lab/GCOPTER
- https://arxiv.org/pdf/2103.00190
- 전반적으로 intuitive하고 ros로 실제 적용해보기 어렵지 않기 때문에 좋은 연구라고 생각한다.
- 또한 cost function을 잘 설계해서 내가 원하는 constraint을 잘 부여해보는 것도 재미있을 것 같다.
