Paper : [PAMPC: Perception-Aware Model Predictive Control for Quadrotors] (https://arxiv.org/abs/1804.04811 (Davide Falanga, Philipp Foehn, Peng Lu, Davide Scaramuzza / IEEE IROS 2018)
Highlights
- Perception-Aware Model Predictive Controller를 제안
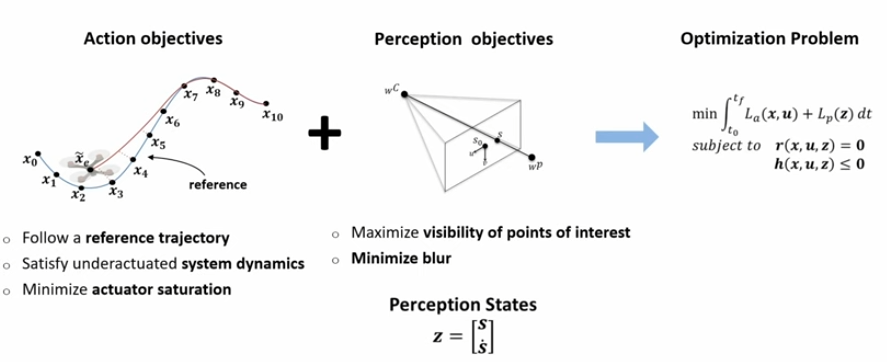
- Action과 Perception objectives를 하나의 MPC optimization problem으로 unify
→ 즉, MPC에 camera sensing에 관련된 objective를 추가했다고 볼 수 있겠음
→ 여기서 objectives라 함은- Quadrotor system dynamics and input limits를 고려
- Image plane에서 point of interest의 visibility를 향상
- Point of interest의 projected velocity를 감소 (이미지 상에서 POI의 속도를 최소화)
→ 이를 통해 생성된 trajectory는 POI를 image centre에 잘 유지할 수 있음
- Onboard low-power ARM computer에서 real-time으로 잘 작동
Introduction
-
Perception algorithm의 발전으로, 카메라를 활용한 vision-based 조종이 빠르게 발전
-
하지만 vision-based perception은 몇 가지 한계가 있음
-
texture distribution이나 light condition과 같은 환경에 크게 영향을 받음
-
robot motion에도 영향을 많이 받음 (motion blur, camera pointing direction, 등)
→ perception과 action이 항상 함께 고려되어야만 함
-


- 예를 들어, 어떤 좁은 통로를 지나기 위해 camera sensor로 localization하기 위해서는 이 통로가 계속해서 보일 수 있도록 action을 취해줘야 함.
MPC 간단 정리
-
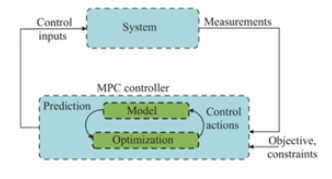
MPC (Model Predictive Control)는 Optimization-based feedback controller.→ Dynamics 모델을 이용해 short time horizon에 대한 미래 state를 예측
→ reference trajectory 또는 desired pose에 대한 cost를 최소화하도록 control을 반복적으로 갱신
✅ 위 그림에 비교하여 설명
- measurement는 현재 state
- system dynamics model을 활용하여 미래 state를 예측
- Objective + constraints를 만족하는 control sequence 계산 → optimization
- Control sequence 중 가장 첫번째 control을 system에 입력
-
이를 위해
MPC는 quadrotor의 dynamic model과 optimization process를 필요로 함 -
일반적인
MPC는 다음과 같은 process를 진행-
현재 state를 입력으로 받음
-
정해진 timestep horizon의 최적화 문제를 solve
→ 이때 dynamics + cost + constraints 고려
-
최적의 control sequence 계산
-
첫 control만 적용하고 다시 반복
-
-
특히
PAMPC에서 활용한Nonlinear RTI-SQP문제의 경우 내부적으로는- 현재 state를 초기 조건으로 두고 최적화 과정에서 future trajectory 계산
- 비선형 dynamics와 cost를 현재 trajectory 주변에서 선형화/이차 근사하여 Quadratic Programming을 구성
- 이전 iteration의 solution을 초기값으로 사용하여 reference, cost, constraints를 포함한 QP를 solve
- 계산된 solution은 현재 linearization 기준에서 근사해이며, 이를 매 timestep 반복하여 실제 optimum 추종 (시간이 흘러가면서 점차 최적화)
- 위 과정 반복
-
optimization이 constraints들을 다룰 수 있기 때문에, actuator limitation과 같은 외부 요인들을 다룰 수 있게 됌 → classical controller에 비해서 갖는 장점
-
미래 horizon 전체에 대해 cost를 평가할 수 있기 떄문에 여러 목적을 하나의 cost function으로 통합하기에 용이
Contributions
- Action과 Perception objective를 동시에 최적화하는 MPC 알고리즘 제안 → 이를 통해 생성된 trajectory는 robot dynamic을 만족시키면서 POI의 visibility를 보장
-
Action objective와 Perception objective의 potential conflict를 numerical optimization으로 해결
- perception objective를 constraint가 아닌 optimization component로 여김
- perception을 cost function으로 합치는 것이 computational complexity를 줄여줌
-
또한, 이러한 방법을 통해 vision-based localization, target tracking 등의 성능을 높일 수 있다.
- land mark visibility가 높아지고, image plane velocity가 낮아지기 때문
Problem Formulation
-
자율로봇항법을 위해서는 두 가지 요소가 필수적
- Perception : ego-motion과 surrounding environment
- Action : combination of motion planning and control algorithm
-
이때 perception과 action의 coupling은 상당히 중요함
- 안전한 비행을 위해서 정확하고 robust한 perception이 필수적인데, vision-based perception의 quality는 camera motion에 많이 영향을 받음
- 또한 image로부터 충분한 정보를 추출할 수 있도록 해줘야 적절한 action을 취할 수 있음
-
시스템은 아래와 같이 정의할 수 있음
- 와 는 robot의 state와 input vector라고 하자.
- 로봇의 dynamic은 미분방정식으로 표현
- 는 perception system의 state vector (e.g., image plane으로의 3D point projection)
- 는 perception 특성 parameter의 vector (e.g., camera의 focal length나 FOV)
-
perception state와 robot state는 robot dynamic를 통해 coupled
- 특정 action objective가 주어진 상황에서 action cost 와 perception cost 를 정의할 수 있고, 이를 통해 최적화 문제로 이 coupling을 공식화할 수 있음
- 과 는 perception, action이 동시에 만족해야하는 제약 조건을 의미
- 보통 equality constraints는 system dynamics를 의미. 여기서는 perception 추가되었을 것
- 보통 inequality constraints는 입력 제한이나 상태 제한 등.
Methodology
- robot의 navigation을 위한 computer vision 알고리즘은 두 가지 기본적인 requirements가 존재
-
알고리즘에 사용될 Point of interest가 이미지에 항상 보여야한다. 예를 들어 visual odometry알고리즘의 pose estimation을 위해서 landmark와 같은 point들이 필요
-
그런 point of interest들이 image에서 명확하게 recognizable해야함. camera의 motion이나 scene까지의 거리로 인해 motion blur 등이 생길 수 있음
→ 그러므로 camera의 motion은 robust한 visual perception을 보장할 수 있도록 계획되어야 함
-
-
이러한 고려를 바탕으로 이 연구에서는 perception object로써 다음의 두 가지를 고려
- visibility of point of interest
- minimization of the velocity of their projection onto the image plane
-
이를 위해 quadrotor에 장착된 카메라의 motion과 3d 공간의 point의 image plane으로 projection 사이의 관계를 파악해야함
→ quadrotor의 state와 input vector의 함수를 통해 image plane으로의 projection dynamic을 표현하여, perception과 action을 하나의 optimization으로 couple
Nomenclature
-
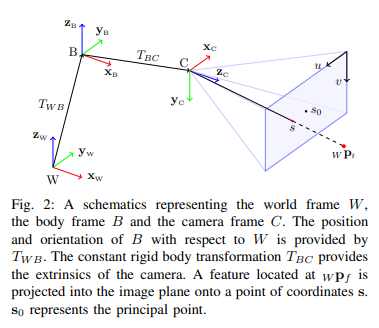
먼저, world frame , quadrotor frame , camera frame 를 정의
-
벡터의 표현의 경우, 는 body frame 를 world frame에 대한 position을 world frame에서 표현한 것
-
강체의 orientation을 표현하기 위해서는 quaternion 사용
-
쿼터니언 의 시간 미분은 아래와 같이 정의
- 벡터 의 skew-symmetric matrix 는 아래와 같이 표현
- operator 은 quaternion과 vector의 곱으로 사용. → 이는 벡터 를 quaternion 만큼 회전시키는 것을 의미 즉, 회전한 새 벡터 는 아래와 같이 구할 수 있음
Quadrotor Dynamics
- world frame에서 표현된 body의 position과 orientation
- world frame에서 표현된 body의 linear velocity
- body frame에서 표현된 angular velocity
- mass-normalized thrust vector (는 i번째 모터의 출력)
- 그러면 아래와 같이 quadrotor의 dynamic model을 정의할 수 있음
- state vector와 input vector는 다음과 같음
Perception Objectives
- Point of interest (landmark)의 3D 위치를 world frame에서 표현한 점
- constant rigid body transformation (camera의 extrinsic parameter)
- 는 camera frame에서 표현할 수 있다.
- camera frame에서의 점 은 pinhole camera model에 의해 image coordinate 로 projection 가능
-
Robust한 vision-based perception을 위해서는 POI 의 projection 가 최대한 이미지의 center에 위치해야한다.
- 외란에 대해 높은 safety margin을 가질 수 있기 때문
- 이미지의 외각에서 보통 많은 왜곡이 발생
-
POI가 이미지에서 계속 보이게 하기 위해서, 이들의 image plane으로의 projection들의 velocity가 줄어야 한다.
-
POI가 정적이라고 가정했을 때, projection들의 속도를 quadrotor의 state와 input vector로 표현할 수 있다. 이를 위해서 를 시간에 대해 미분한다.
- 정리하면
- 를 계산하기 위해서는 를 시간에 대해 미분
Action Objectives
- Quadrotor가 3d space에서 원하는 위치에 도달하게 하기 위해서는 적절한 trajectory 계획이 필요한데, 이를 위해서 두 가지의 objective가 고려되어야 함
- System의 available bounded inputs : motor의 thrust가 upper & lower bound를 지켜야 한다. → limited input vector
- Underactuated nature of a quadrotor : control inputs (thrust, roll, pitch, yaw)가 독립적으로 모든 degree of freedom을 가지고 control할 수 없다는 system dynamics를 고려해야 한다.
- System의 available bounded inputs : motor의 thrust가 upper & lower bound를 지켜야 한다. → limited input vector
Challenges
-
Perception과 Action을 동시에 고려하는 것은 conflict가 발생할 수 있기 때문에 challenging.
-
예를 들어, quadrotor가 reference trajectory를 track하기 위해서는 원하는 acceleration의 방향으로의 추력을 주기 위해 rotate해야하지만, perception objective가 POI의 visibility를 최대화하기 위해 그러한 rotation을 minimize해야할 수도 있다.
-
그러므로 system dynamics를 통해 이 둘을 coupling시켜 둘 다 고려할 수 있는 model-based optimization framework가 필요하다.
Model Predictive Control
-
Perception과 action의 coupled된 문제를 optimization 문제로 푸는 것은 기존의 classical control (PID)에 비해서 몇 가지 장점을 가진다.
- System dynamics를 고려할 수 있다. (underactuated dynamics)
- Input constraint를 고려할 수 있다. (Input bound)
- Dynamic한 trajectory를 생성할 수 있다.
- Future cost prediction을 고려하여 최소화할 수 있다.
-
이러한 optimization의 기본적인 공식은 위에서 언급했듯이 아래와 같으며,
-
이러한 quadratic cost를 가지는 non-linear program은 sequential quadratic program (SQP)에 의해 근사될 수 있다. (iterative approximation)
-
이를 위해서 system dynamics를 time horizon 안에서 time step 로 discretize
-
time-varying state cost matrix 과 time-varying perception, input cost matrixs를 정의 . 최종적으로 perception function 를 정의
- 여기서 는 quadrotor의 state와 input variable의 함수
-
그러면 cost function은 아래와 같이 쓸 수 있다.
-
여기서 는 reference와의 차이를 의미.
- 우리의 경우에는 의 reference는 null vector (keep POI center of image와 zero velocity)
- 와 의 경우에는 precomputed trajectory나 target pose로부터 정해지는 값 (이것이 꼭 필요한 것 같지는 않다.)
-
input 와 velocty 는 아래와 같은 제약조건을 만족해야함
- 최적화 문제를 풀 때에는 매 control loop마다 하나의 SQP iteration을 수행하여 최적화 문제의 solution을 approximate하는 식이며, 초기 state로는 onboard에서 따로 돌아가는 Visual-Inertial Odometry pipeline에서 제공되는 가장 최근의 estimate 를 활용한다.
- 즉, SQP가 full optimization을 수행하지 않고, 적절한 예상치 (외부 알고리즘으로 부터 구한 real state)로부터 최적화를 수행하기 때문에, 훨씬 더 빠르고 정확한 최적화를 수행
Experiments
-
소형 quadrotart를 통해 실험 진행
-
Qualcomm mvSDK로 VIO 수행
-
ACADO (nonlinear optimization setup framework)와 qpOASES (Quadratic programming solver)를 통해 optimization 수행
-
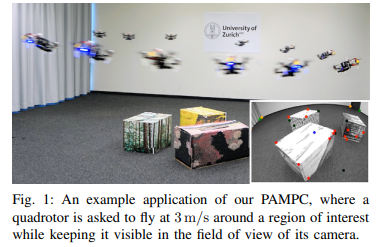
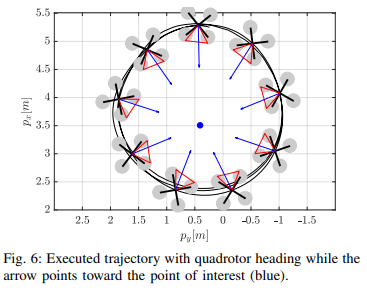
예시 실험1. circular flight : 하나의 POI를 정해서 이를 따라 원형 경로를 움직이도록
- circular reference trajectory를 로봇에게 미리 제공
Code 구현
https://github.com/uzh-rpg/rpg_quadrotor_control
https://github.com/uzh-rpg/rpg_mpc
- controller의 run()함수를 통해 command input을 얻어낸다.
→ MPC가 control loop에서 최적화 한번 돌리고 첫 입력 뽑아 쓰는 것
const quadrotor_common::ControlCommand command = base_controller_.run(
state_estimate, reference_trajectory_, base_controller_params_);Control에 필요한 variables
- State (kStateSize = 10):
- Position: x,y,z
- Orientation: Quaternion components (w,x,y,z)
- Velocity: vx,vy,vz
- Input (kInputSize = 4):
- Thrust: T
- Body rates: p,q,r (angular velocities around the axes)
- Online data
- Point of Interest position:
- Camera-Body translation:
- Camera-Body rotation :
Quadrotor dynamics
- 페이퍼에 정의
- 코드 구현
- 공식에 따라 thrust vector 를 만큼 회전 시키는 것 확인
- 식도 공식대로
- << : system에 미분방정식 추가
// Position derivatives
f << dot(p_x) == v_x;
f << dot(p_y) == v_y;
f << dot(p_z) == v_z;
// Quaternion derivatives
f << dot(q_w) == 0.5 * ( - w_x * q_x - w_y * q_y - w_z * q_z);
f << dot(q_x) == 0.5 * ( w_x * q_w + w_z * q_y - w_y * q_z);
f << dot(q_y) == 0.5 * ( w_y * q_w - w_z * q_x + w_x * q_z);
f << dot(q_z) == 0.5 * ( w_z * q_w + w_y * q_x - w_x * q_y);
// Velocity derivatives (Acceleration)
f << dot(v_x) == 2 * ( q_w * q_y + q_x * q_z ) * T;
f << dot(v_y) == 2 * ( q_y * q_z - q_w * q_x ) * T;
f << dot(v_z) == ( 1 - 2 * q_x * q_x - 2 * q_y * q_y ) * T - g_z;Perception Objectives
-
페이퍼에 따르면 perception objectives에서는 POI의 image로의 projection이 center에 위치해야함
-
하지만 POI는 world frame에서 정의된 3D 좌표이므로, 아래의 과정이 필요
- Camera frame에서의 POI 좌표를 계산
- POI를 image plane으로 projection → 이 projection을 cost function으로 사용해야 함
-
코드 구현 : 엄청 복잡한 식으로 intermediate state를 정의
// Intermediate states to calculate point of interest projection!
IntermediateState intSx = ((((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*(-(-q_x)*q_B_C_z-q_B_C_w*q_y-q_B_C_x*q_z-q_B_C_y*q_w)+((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)*(-(-q_y)*q_B_C_x-q_B_C_w*q_z-q_B_C_y*q_x-q_B_C_z*q_w)+((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y))*(p_F_x-p_x)+(((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)+((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)+(-(-q_x)*q_B_C_z-q_B_C_w*q_y-q_B_C_x*q_z-q_B_C_y*q_w)*(-(-q_z)*q_B_C_y-q_B_C_w*q_x-q_B_C_x*q_w-q_B_C_z*q_y))*(p_F_y-p_y)+(((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*(-(-q_x)*q_B_C_z-q_B_C_w*q_y-q_B_C_x*q_z-q_B_C_y*q_w)+((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*(-(-q_x)*q_B_C_z-q_B_C_w*q_y-q_B_C_x*q_z-q_B_C_y*q_w)+((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)+((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y))*(p_F_z-p_z));
IntermediateState intSy = ((((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)+((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)*(-(-q_y)*q_B_C_x-q_B_C_w*q_z-q_B_C_y*q_x-q_B_C_z*q_w)+((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)*(-(-q_z)*q_B_C_y-q_B_C_w*q_x-q_B_C_x*q_w-q_B_C_z*q_y))*(p_F_y-p_y)+(((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)+((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)+(-(-q_x)*q_B_C_z-q_B_C_w*q_y-q_B_C_x*q_z-q_B_C_y*q_w)*(-(-q_y)*q_B_C_x-q_B_C_w*q_z-q_B_C_y*q_x-q_B_C_z*q_w))*(p_F_z-p_z)+(((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*(-(-q_y)*q_B_C_x-q_B_C_w*q_z-q_B_C_y*q_x-q_B_C_z*q_w)+((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*(-(-q_y)*q_B_C_x-q_B_C_w*q_z-q_B_C_y*q_x-q_B_C_z*q_w)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y))*(p_F_x-p_x));
IntermediateState intSz = ((((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*(-(-q_x)*q_B_C_z-q_B_C_w*q_y-q_B_C_x*q_z-q_B_C_y*q_w)+((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)*((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)+((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)*(-(-q_z)*q_B_C_y-q_B_C_w*q_x-q_B_C_x*q_w-q_B_C_z*q_y))*(p_F_z-p_z)+(((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)+((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)+((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)*((-q_z)*q_B_C_y+q_B_C_w*q_x+q_B_C_x*q_w+q_B_C_z*q_y)+(-(-q_y)*q_B_C_x-q_B_C_w*q_z-q_B_C_y*q_x-q_B_C_z*q_w)*(-(-q_z)*q_B_C_y-q_B_C_w*q_x-q_B_C_x*q_w-q_B_C_z*q_y))*(p_F_x-p_x)+(((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*(-(-q_z)*q_B_C_y-q_B_C_w*q_x-q_B_C_x*q_w-q_B_C_z*q_y)+((-q_x)*q_B_C_x+(-q_y)*q_B_C_y+(-q_z)*q_B_C_z+q_B_C_w*q_w)*(-(-q_z)*q_B_C_y-q_B_C_w*q_x-q_B_C_x*q_w-q_B_C_z*q_y)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w)+((-q_x)*q_B_C_z+q_B_C_w*q_y+q_B_C_x*q_z+q_B_C_y*q_w)*((-q_y)*q_B_C_x+q_B_C_w*q_z+q_B_C_y*q_x+q_B_C_z*q_w))*(p_F_y-p_y));
- 실제로는 아래의 내용을 길게 늘어쓴 것
-
World → Camera frame rotation을 계산 :
-
World → Camera frame translation을 계산 :
-
Camera frame에서의 POI
-
→ 즉, intermediate state는 POI의 camera frame 좌표
- 다음 image plane으로 projection (normalized image plane)
- 코드
u = intSx / (intSz + epsilon);
v = intSy / (intSz + epsilon);Cost function and weights
- Column cost vector 에 여러 variable 삽입
h << p_x << p_y << p_z
<< q_w << q_x << q_y << q_z
<< v_x << v_y << v_z
<< intSx/(intSz + epsilon) << intSy/(intSz + epsilon)
<< T << w_x << w_y << w_z;→ 이 h 값은 timestep마다 계산되는 값이고, 아래는 실제로 상태 x와 control 입력 u에 의해 이렇게 계산된다 라는 것을 선언하는 과정.
→ 그러니까 실제로는 다음과 같은 과정
- solver가 최적화 변수 후보 를 하나 선택
- 해당 를 에 대입
- cost vector 를 계산
- cost ( 계산
- 마지막 cost vector에는 control input은 없음 (time horizon 이후 control 정의 x)
hN << p_x << p_y << p_z
<< q_w << q_x << q_y << q_z
<< v_x << v_y << v_z
<< intSx/(intSz + epsilon) << intSy/(intSz + epsilon);- 각 cost element의 weight도 정의
DMatrix Q(h.getDim(), h.getDim());
Q.setIdentity();
Q(0,0) = 100; // x
Q(1,1) = 100; // y
Q(2,2) = 100; // z
Q(3,3) = 100; // qw
Q(4,4) = 100; // qx
Q(5,5) = 100; // qy
Q(6,6) = 100; // qz
Q(7,7) = 10; // vx
Q(8,8) = 10; // vy
Q(9,9) = 10; // vz
Q(10,10) = 0; // Cost on perception
Q(11,11) = 0; // Cost on perception
Q(12,12) = 1; // T
Q(13,13) = 1; // wx
Q(14,14) = 1; // wy
Q(15,15) = 1; // wz- reference 정의
// Set a reference for the analysis (if CODE_GEN is false).
// Reference is at x = 2.0m in hover (qw = 1).
DVector r(h.getDim()); // Running cost reference
r.setZero();
r(0) = 2.0;
r(3) = 1.0;
r(10) = g_z;
DVector rN(hN.getDim()); // End cost reference
rN.setZero();
rN(0) = r(0);
rN(3) = r(3);- Cost function 정의 → Least Squared method 사용 : cost vector와 reference vector 사이 차이를 최소화할 수 있도록 cost function을 정의 ✅ reference는 기본적으로 h와 같은 차원을 가지지만 실제로는 내가 원하는 reference에만 값을 넣어주고 나머지는 Q를 활용해 무시
- 페이퍼에서 cost function 정의 → 는 reference와의 차이를 의미하므로, 위와 같은 식이고, 단지 cost vector component를 나눠서 써놓은 것
- 코드 구현
ocp.minimizeLSQ( Q, h, r );
ocp.minimizeLSQEndTerm( QN, hN, rN );Discussion
- UAV control을 위해 PID를 사용하다가 더 많은 constraint를 다루고 싶어서 MPC를 공부
- MPC 구현을 위해 코드가 함께 있는 study를 알게 되어 리뷰
