행렬
행렬의 곱
행 벡터와 열 벡터의 내적
단위행렬을 제외한 모든 행렬의 곱은 교환법칙이 성립하지 않음
행렬의 곱 알고리즘
슈트라센 알고리즘 : https://ko.wikipedia.org/wiki/%EC%8A%88%ED%8A%B8%EB%9D%BC%EC%84%BC_%EC%95%8C%EA%B3%A0%EB%A6%AC%EC%A6%98
딥마인드 알고리즘 : https://www.deepmind.com/blog/discovering-novel-algorithms-with-alphatensor
슈트라센 알고리즘보다 더 빠르다고 한다는데 계산식은 찾아봐야 할 듯
전치행렬(Transpose)
주대각선을 기준으로 반사 대칭하여 얻은 행렬
역행렬(Inverse)
A-1
정사각행렬 A에 대하여 인 행렬
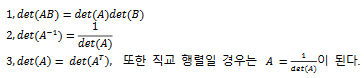
(A-1)T = (AT)-1
(AB)-1 = B-1A-1
A-1 = Aadj
수반행렬 Aadj = 여인수 행렬의 전치행렬
A행렬이 직교행렬일 경우 A-1 = AT를 통해 연산량을 크게 줄일 수 있음
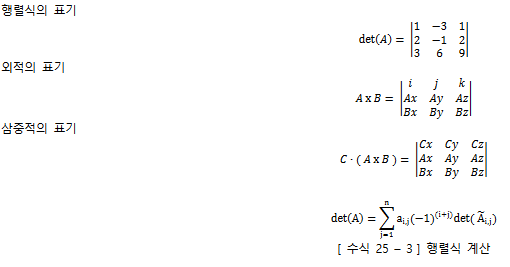
행렬식(Determinant)
역행렬 존재 여부 결정, 이면 역행렬 존재하지 않음
표기법
성질
계산법
사루스 법칙, 소행렬식 전개(라플라스 전개) 등 존재
Reference : https://namu.wiki/w/%ED%96%89%EB%A0%AC%EC%8B%9D#s-8.1
Reference : https://namu.wiki/w/%EB%9D%BC%ED%94%8C%EB%9D%BC%EC%8A%A4%20%EC%A0%84%EA%B0%9C
소행렬식
원소의 소행렬식을 이용해 minor 행렬 구성
소행렬식의 여인수 행렬 구성
원행렬의 임의의 벡터와 소행렬식의 여인수 행렬을 이용해 Det계산

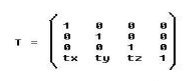
변환(Transform)

회전 방향 사진 추가 필요
위 변환 공식은 Vector가 행렬 뒤에 붙는 경우로 Vector가 Matrix앞에 붙을 경우 sin함수의 계수가 바뀐다
DirextX는 행우선 저장방식이므로 Vector-Matrix방식으로 연산이 수행되야 한다
기본적으로 y축은 다른 축과 sin함수의 계수가 다른 것을 확인할 수 있음
실차원과 행렬차원
행렬차원은 계산하고자 하는 실 차원의 크기보다 1차수 더 커야한다
2차원을 예를들어 2차원에서 회전과 신축은 2차원 벡터와 차수가 같은 22 행렬로 계산이 가능하지만, 이동의 경우 22 행렬로는 표현이 불가능
하지만 3*3행렬로 표현할 경우 추가된 벡터에 dx를 추가하므로써 이동 역시 행렬곱을 통해 계산이 가능
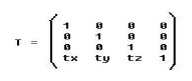
이를 통해 Vector의 회전, 신축, 이동을 모두 행렬의 곱으로 표현할 수 있게 되었고, 변환 행렬을 미리 수행하여 마지막에 Vector들에 적용하는 방식으로 연산량을 크게 줄일 수 있게 됨
이를 동차좌표계라고 하는데 아핀변환과의 차이가 무엇일까?
독특한 struct union 구조
#include <iostream>
using namespace std;
struct float2
{
union
{
struct
{
float x;
float y;
};
float f[2];
};
};
struct float3 : public float2
{
union
{
struct
{
float z;
};
};
float f[3]; // 메모리 따로 할당 됨
};
int main()
{
float2 f2;
f2.x = 10;
f2.y = 10;
//f2.f[2] = 50; // 접근 불가능
//cout << f2.f[3] << endl; // 접근 가능. 위험한 접근
float3 f3;
f3.x = 10;
f3.y = 20;
f3.z = 30;
f3.f[2] = 50;
//f3.f[3] = 60; // 접근 불가능
cout << f3.x << ", " << f3.y << ", " << f3.z << endl;
cout << f3.f[0] << ", " << f3.f[1] << ", " << f3.f[2] << endl;
//cout << f3.f[3] << endl; // 접근 가능. 위험한 접근
cout << sizeof(float3) << endl; // memory size 24
return 0;
}#include <iostream>
using namespace std;
struct float2
{
union
{
struct
{
float x;
float y;
};
float f[2];
};
};
struct float3 : public float2
{
union
{
struct
{
float z;
};
};
};
int main()
{
float2 f2;
f2.x = 10;
f2.y = 10;
float3 f3;
f3.x = 10;
f3.y = 20;
f3.z = 30;
f3.f[2] = 50;
cout << f3.x << ", " << f3.y << ", " << f3.z << endl;
cout << f3.f[0] << ", " << f3.f[1] << ", " << f3.f[2] << endl; // 기대되로 모두 접근 가능
cout << sizeof(float3) << endl;
return 0;
}