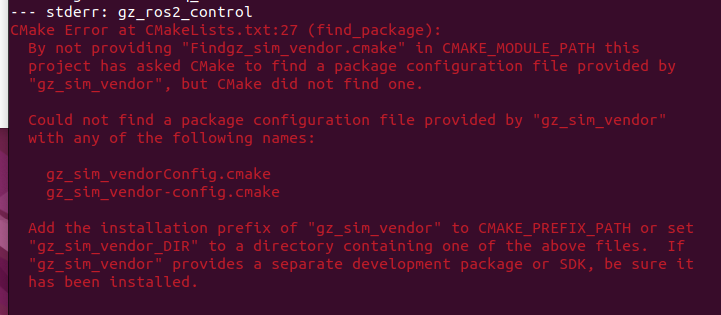
해당 에러가 계속해서 사라지지 않아서 모든 패키지를 제거하고 재설치 했다.
문제의 원인은 gazebo 버전에 의한 문제인것으로 확인은 되지만 솔루션에도 해결되지 않았다.
https://github.com/doosan-robotics/doosan-robot2/issues/61
1. 기존 ROS 2 및 관련 패키지 제거:
sudo apt remove ros-* && sudo apt autoremove-
ROS 2 관련 디렉토리 삭제:
rm -rf ~/ros2_ws rm -rf ~/ws_moveit -
ROS 2 Iron 설치 (Ubuntu 22.04 기준):
sudo apt update && sudo apt install software-properties-common sudo add-apt-repository universe sudo apt update && sudo apt install curl sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null sudo apt update sudo apt upgrade sudo apt install ros-iron-desktop -
환경 설정:
echo "source /opt/ros/iron/setup.bash" >> ~/.bashrc source ~/.bashrc -
개발 도구 및 ROS 2 패키지 설치:
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential sudo apt install python3-colcon-common-extensions -
rosdep 초기화:
sudo rosdep init rosdep update -
MoveIt 2 워크스페이스 생성 및 소스 코드 다운로드:
mkdir -p ~/ws_moveit/src cd ~/ws_moveit/src git clone https://github.com/ros-planning/moveit2.git -b iron vcs import < moveit2/moveit2.repos -
의존성 설치:
cd ~/ws_moveit rosdep install -r --from-paths . --ignore-src --rosdistro iron -y -
빌드:
colcon build --event-handlers desktop_notification- status- --cmake-args -DCMAKE_BUILD_TYPE=Release -
환경 설정:
echo "source ~/ws_moveit/install/setup.bash" >> ~/.bashrc source ~/.bashrc
감사합니다. https://www.youtube.com/channel/UCxlkiu9_aWijoD7BannNM7w