ROS
1.자율주행 시스템

아마존 공장같이 자동화를 필요로하는 분야에서는 로봇이 물품을 나르는 일이 이미 일상이다.최근 식당에서 자주보이는 서빙로봇도 같은 이유이다.솔직히 가격을 듣고 인건비와 비교해서 보면 훨씬 저렴하다고 느끼는 사람들이 많을 것이다.자율 주행 시스템은 굉장히 복잡하고, 다중
2.BOM list - Bumperbot 1
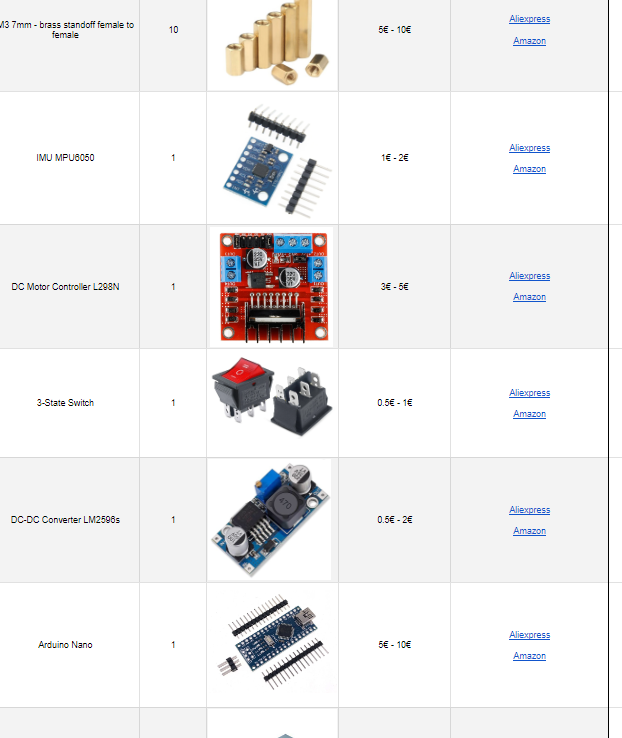
BOM(Bill of Material)은 자재명세서 라고 하며 제품을 제조하는데 필요한 원자재 목록이다.원하는 프로젝트의 사양에 맞춰 하나하나 그냥 사기만했지만,협업을 위해 앞으로 이런 프로젝트 관리하는 방식을 하나씩 배워나가야 겠다.말이 어려운것 같지만 실제로는 진짜
3.Setup 1 - 가상 머신에 Ubuntu 설치
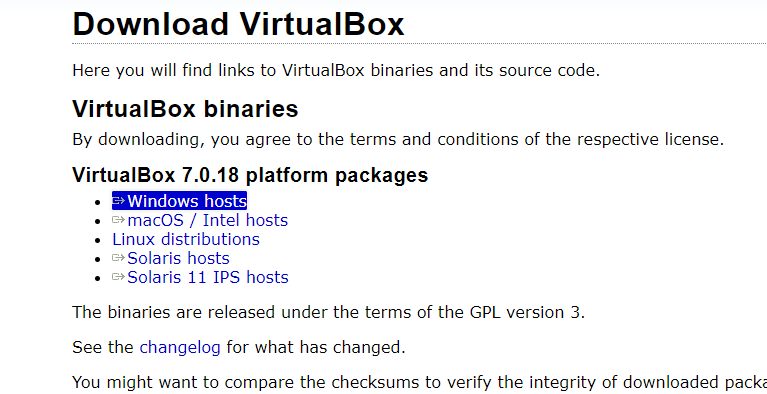
본인 OS에 맞게 VirtualBox를 설치해준다설정 건드리지 않고 다운로드 진행두가지 방식이 있다.말 그대로 virtualbox, 가상 환경을 만들고 그 환경에서 사용하는것이거는 남는 공간이 많을때 하는것이 좋다. 예를들어 아예안쓰는 D 드라이브가 있다면 그 D 드라
4.Setup 2 - ROS 설치
https://wiki.ros.org/noetic/Installation/Ubuntu20.04 환경에서 ROS를 설치하는 공식 가이드인데,https://github.com/Kimseongbeen/Study/blob/master/ROS/readme.md
5.Setup 3 - VSCode & teminator
Ubuntu Software에 들어가서 VSCode를 설치설치를 한 다음 Extension(확장) 에 들어간다.들어가서 아래 5가지 항목을 다운로드 C++pythonCMakeCMake ToolsXMLXML ToolsROS입력하고 맨 위에 있는 놈들을 다운로드 하면 된다
6.ROS 작업 공간(Workspace) 만들기
ROS (Robot Operating System)는 로봇 응용 프로그램을 위해 많은 운영 체제 기능을 시뮬레이트하는 소프트웨어 프레임워크이다.터미널에서 bumperbot_ws 라는 폴더를 만들고 이동해주자.src 라는 폴더를 생성ROS 오버레이 - 모든 ROS 패키지
7.ROS 환경에서 Topic publisher + BOM List

Simple publisher GithubROS 워크스페이스에서 구독, 게시의 간단한 예시를 실습
8.Robot Model - URDF 1
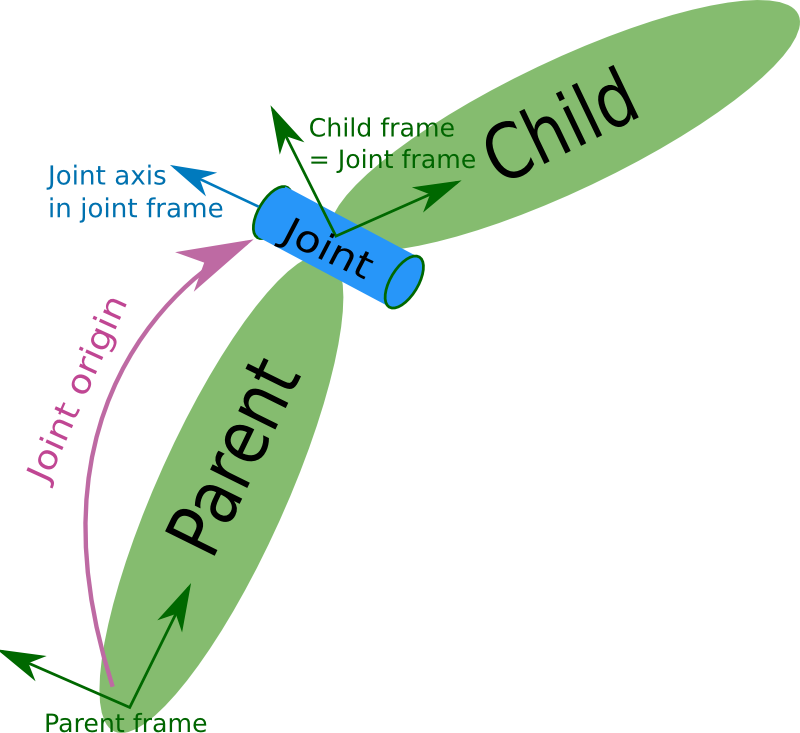
워크스페이스까지 만들었는데, 시뮬레이션을 동작하기 위해서는Model > Visualize > Simulate > 문제점 찾기 > 수정 의 순서로 진행할 예정이다.Model 단계에 해당하는 URDF로 XML 태그를 사용하여 로봇의 구조와 구성 요소를 표현한다.HTML과
9.ROS 시스템 - RViz, Parameter Server
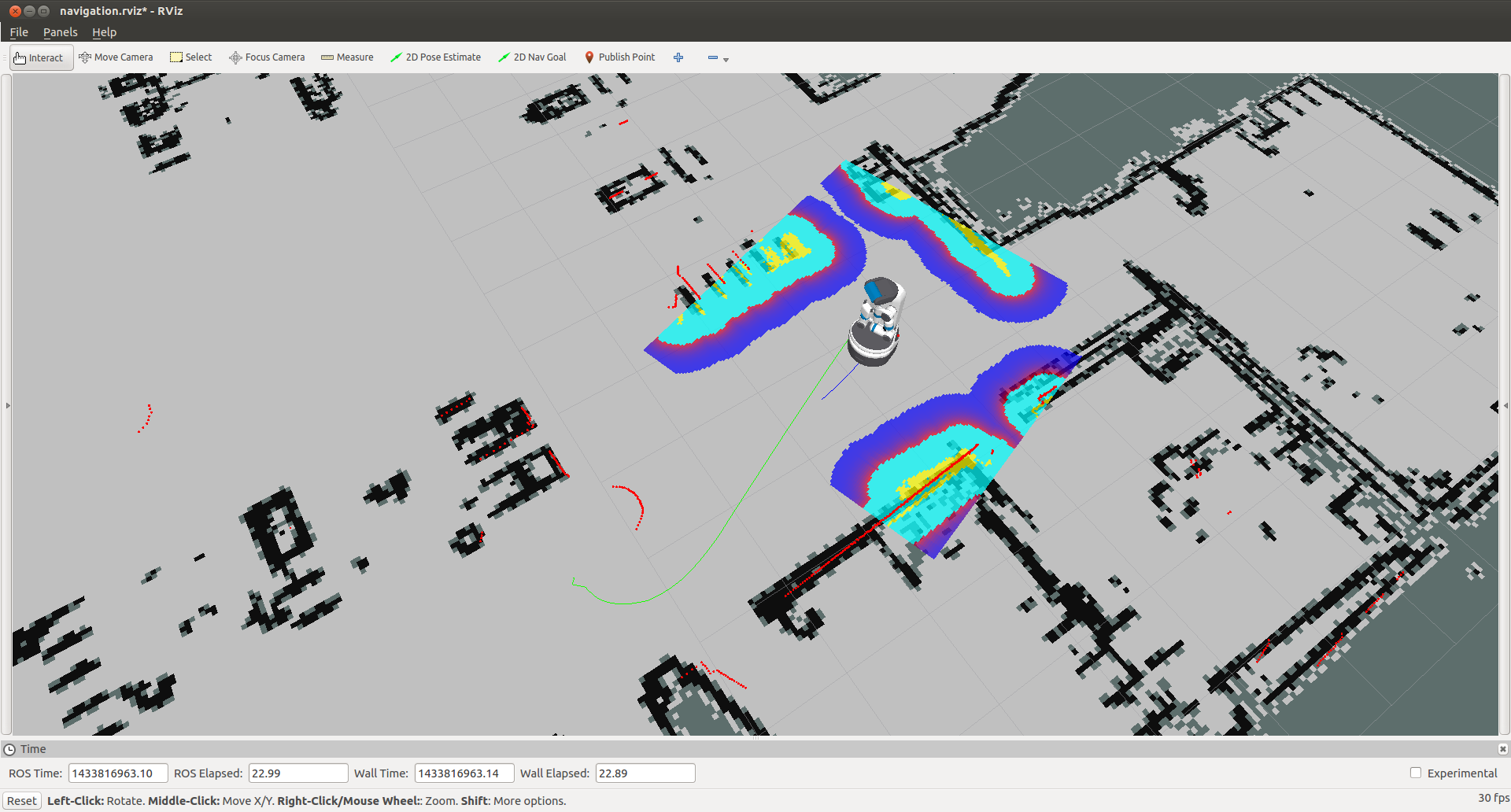
RViz는 ROS Visualization의 약자로 여러 플러그인을 제공해 ROS의 메시지를 시각화한다.예를 들어 로봇이 이동하고 내비게이션을 할 수 있는 건물 지도를 시각화 할 수 있다.파라미터 서버는 ROS 애플리케이션의 노드들 간 대체 통신 프로토콜을 제공한다.위
10.Robot Model 1
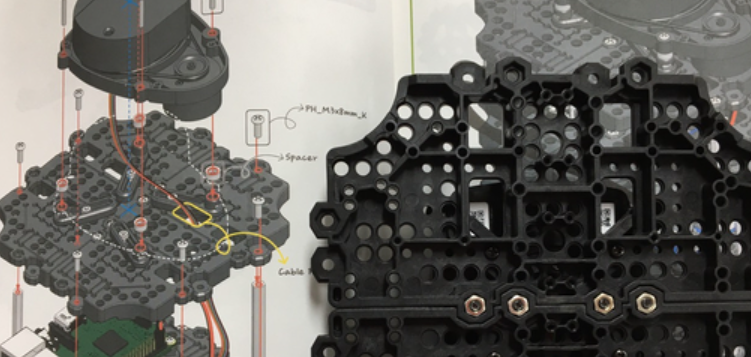
출력을 하고 끼우려고하는데 뭔가 안맞아서 확인해보니까 튀어나온 부분은 서포터를 위해 설계된걸로 뜯어내줘야한다.뜯어 내주고 나니 잘 붙는 모습이다.그리고 turtlebot3 model인데 여기서 볼트, 너트가 필요해 보인다.구글링 검색을 통해 싱기버스에 해당 모델이 올라
11.MoveIt 에러 발생
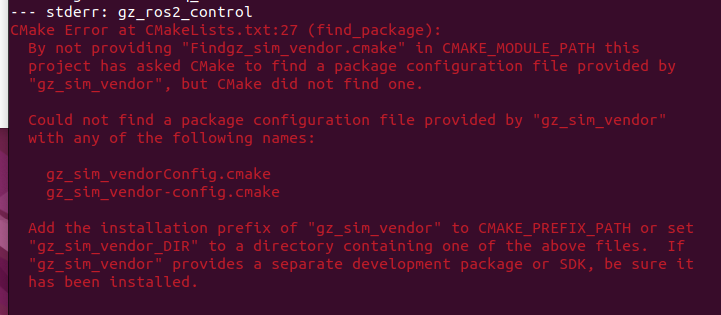
해당 에러가 계속해서 사라지지 않아서 모든 패키지를 제거하고 재설치 했다.문제의 원인은 gazebo 버전에 의한 문제인것으로 확인은 되지만 솔루션에도 해결되지 않았다.https://github.com/doosan-robotics/doosan-robot2/iss
12.Robot Arms 1 - Servo 3D model
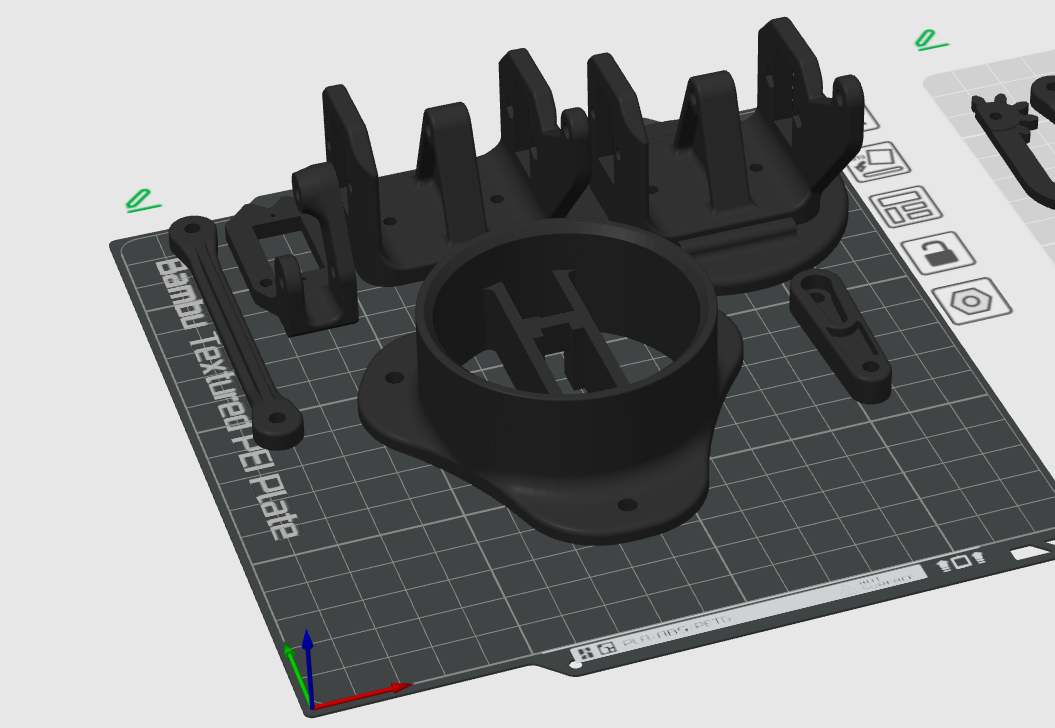
다음 프로젝트로 Servo motor, Ros2 Moveit을 이용한 로봇팔 프로젝트를 진행하는데 하드웨어를 3d 프린터로 뽑고 esp 모듈로 로봇팔을 제어하려 한다.