몸체 부분까지 진행을 했고 금일 모터가 도착을 해서 조립을 완성을 했다.

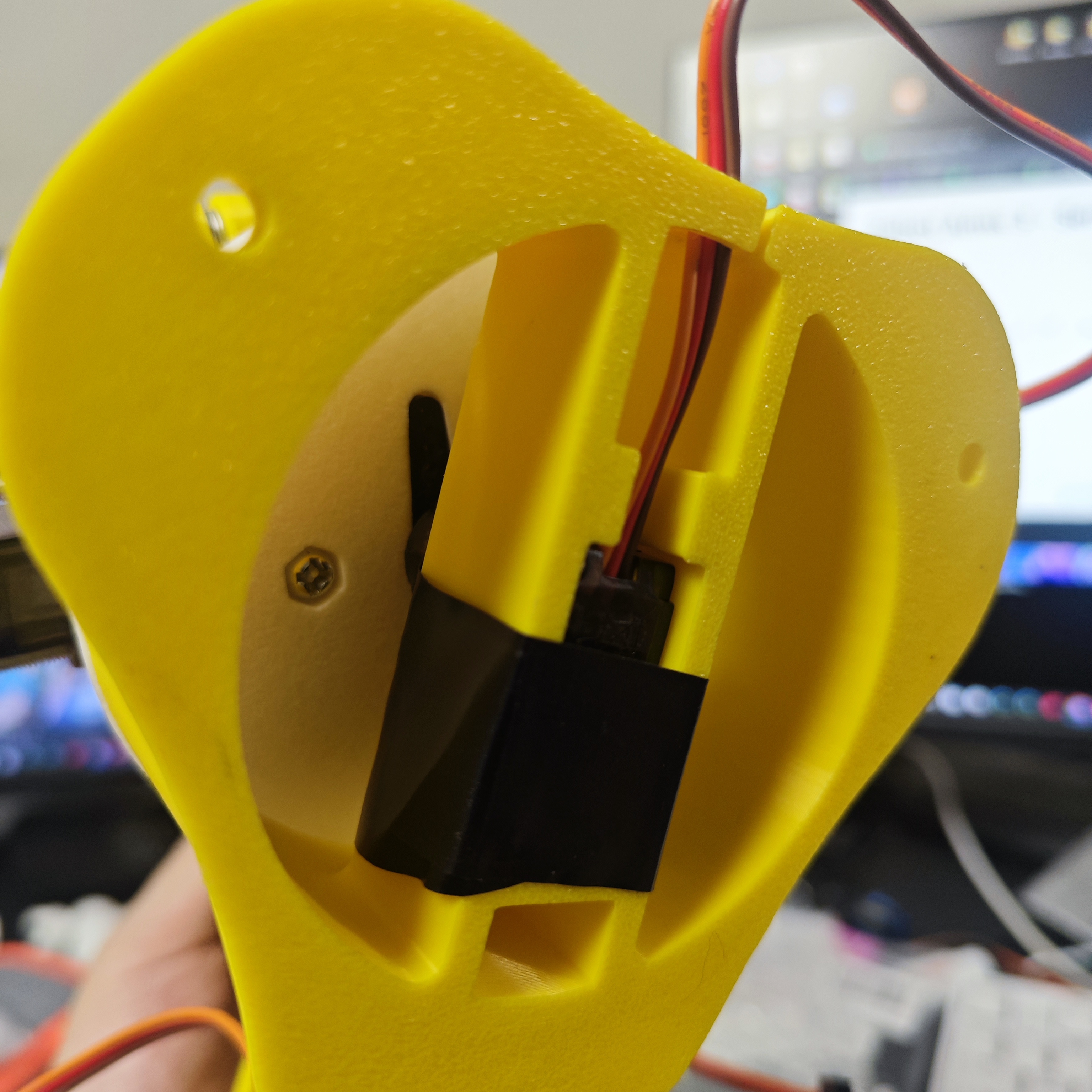
원래는 밑에 screw로 고정을 해야하는데 3d model 에 구멍이 없어서 절연 테이프로 고정했다.
이 부분은 로봇팔의 몸체를 회전 시켜주는 역할을 한다.
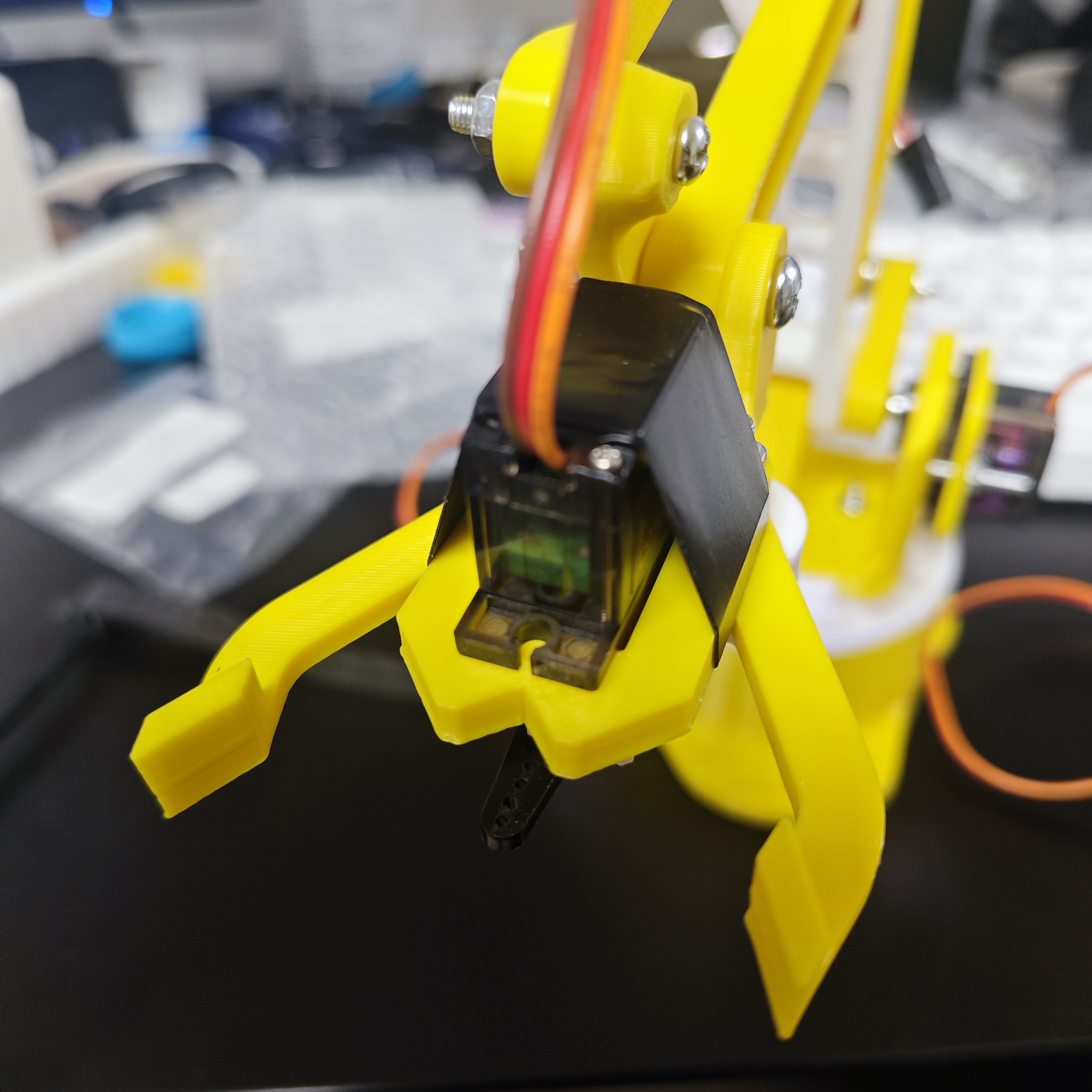
양쪽의 모터들은 팔을 숙이고 팔을 옮겨주는 역할을 하는 모터이다.

로봇팔 부분에도 똑같이 절연테이프로 고정을 하였고
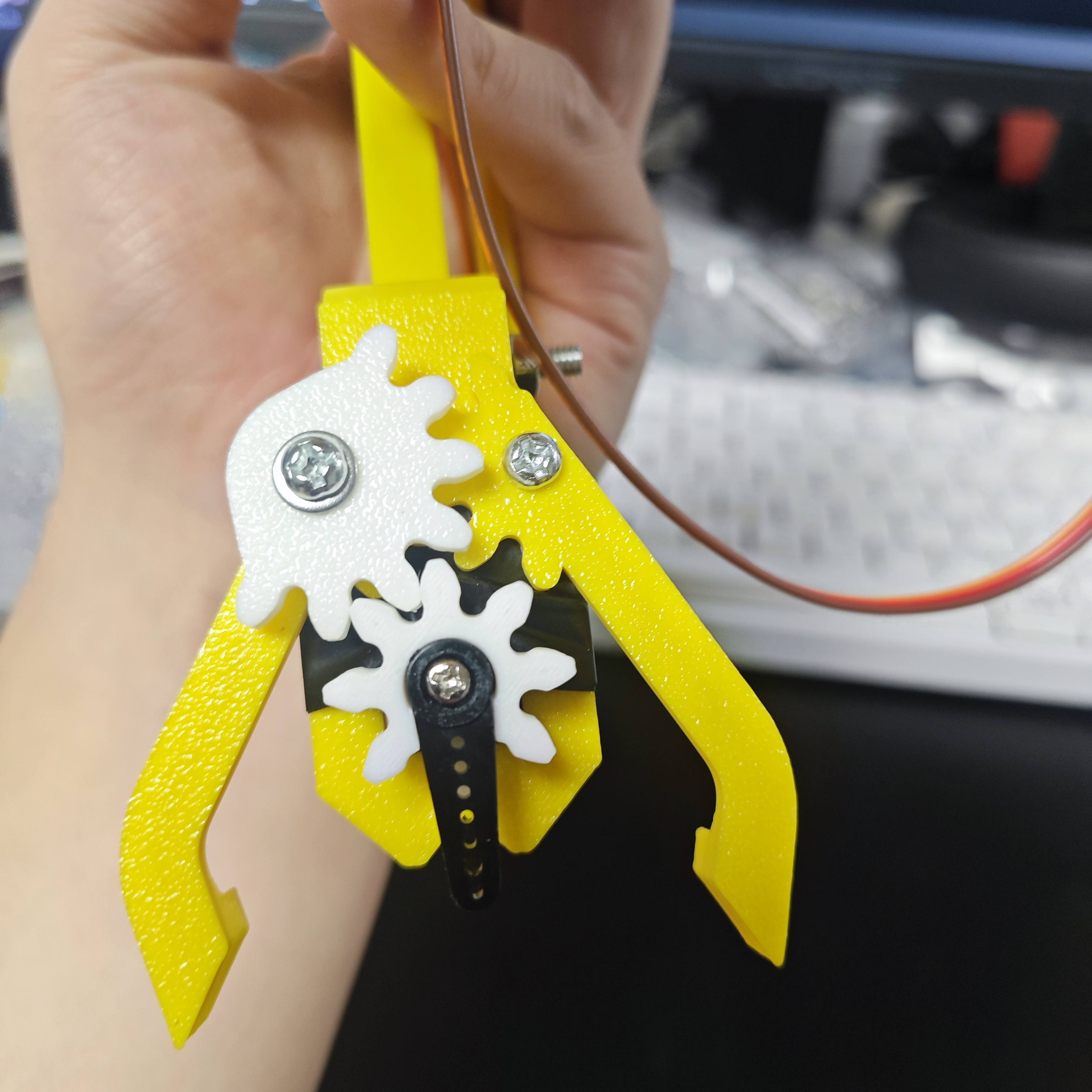
아래는 모터가 회전을 하면 톱니바퀴가 돌면서 어떤것을 집게 부착을 했다.
감사합니다. https://www.youtube.com/channel/UCxlkiu9_aWijoD7BannNM7w