Introduction to Time Series and Forecasting
Peter J. Brockwell, Richard A. Davis 를 바탕으로 작성되었습니다.
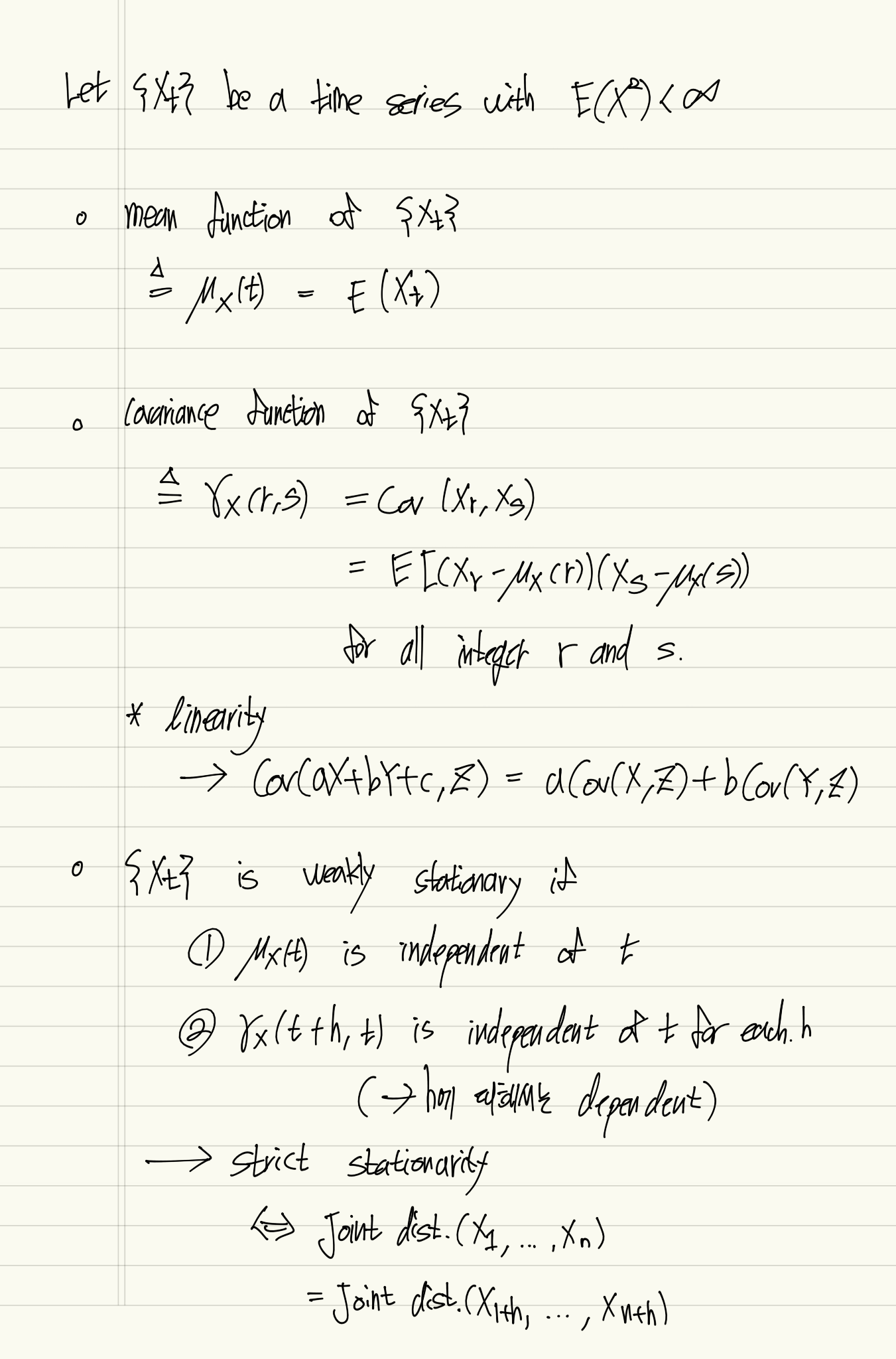
Definition of time series model
A General Approach to time series modelling
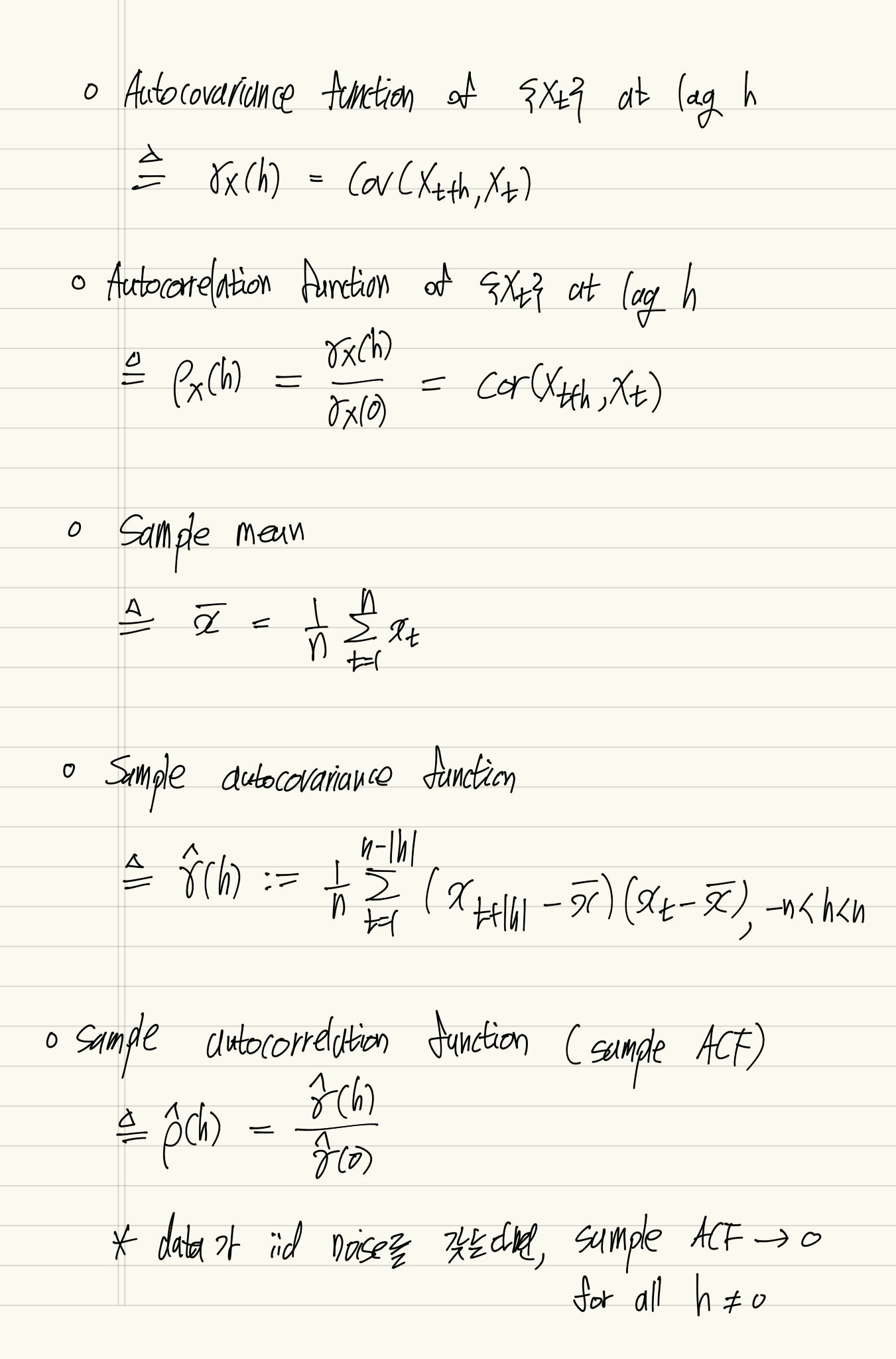
Autocovariance & Autocorrelation
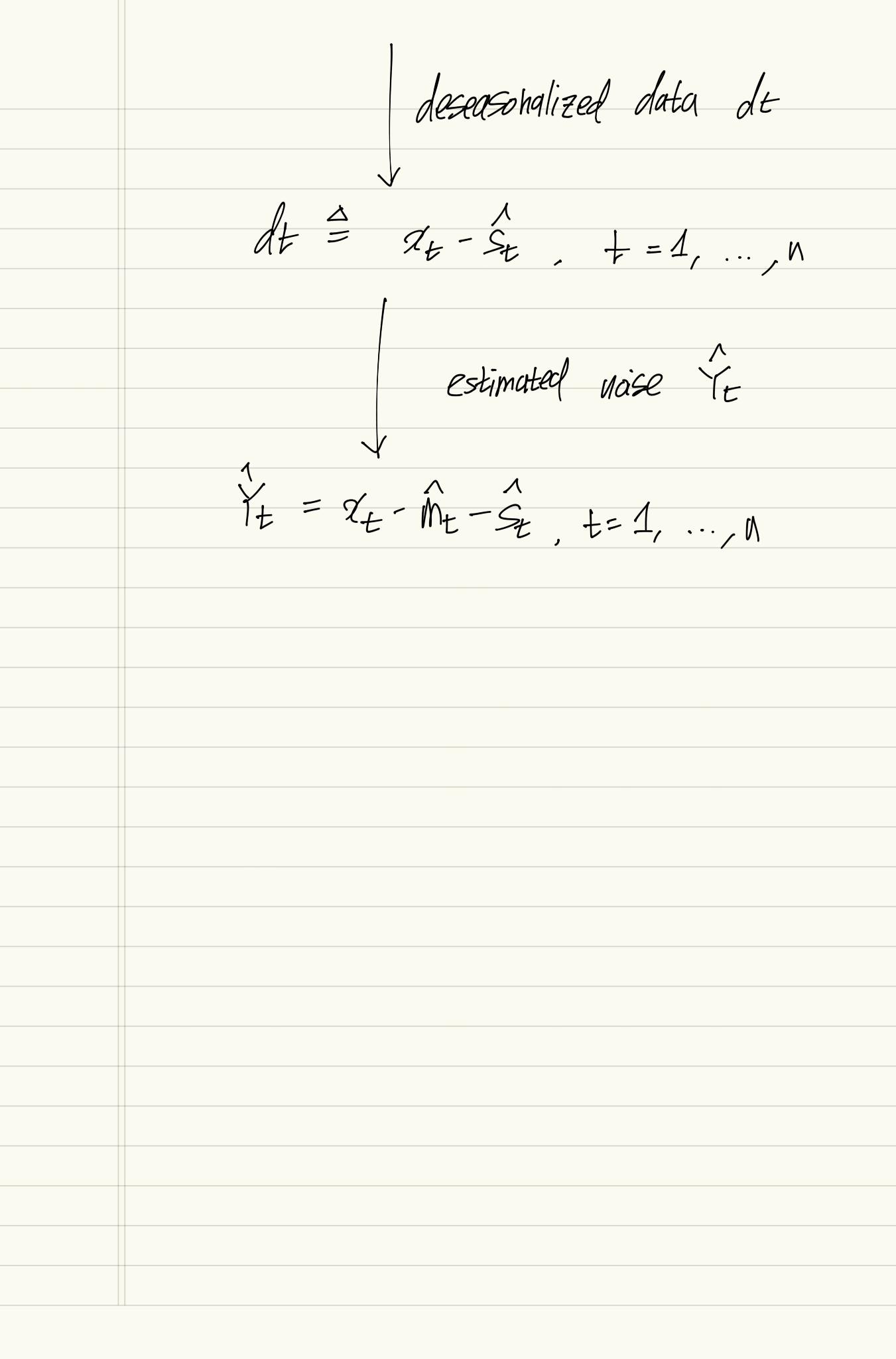
Esitmation and Elimination of Trend and seasonality
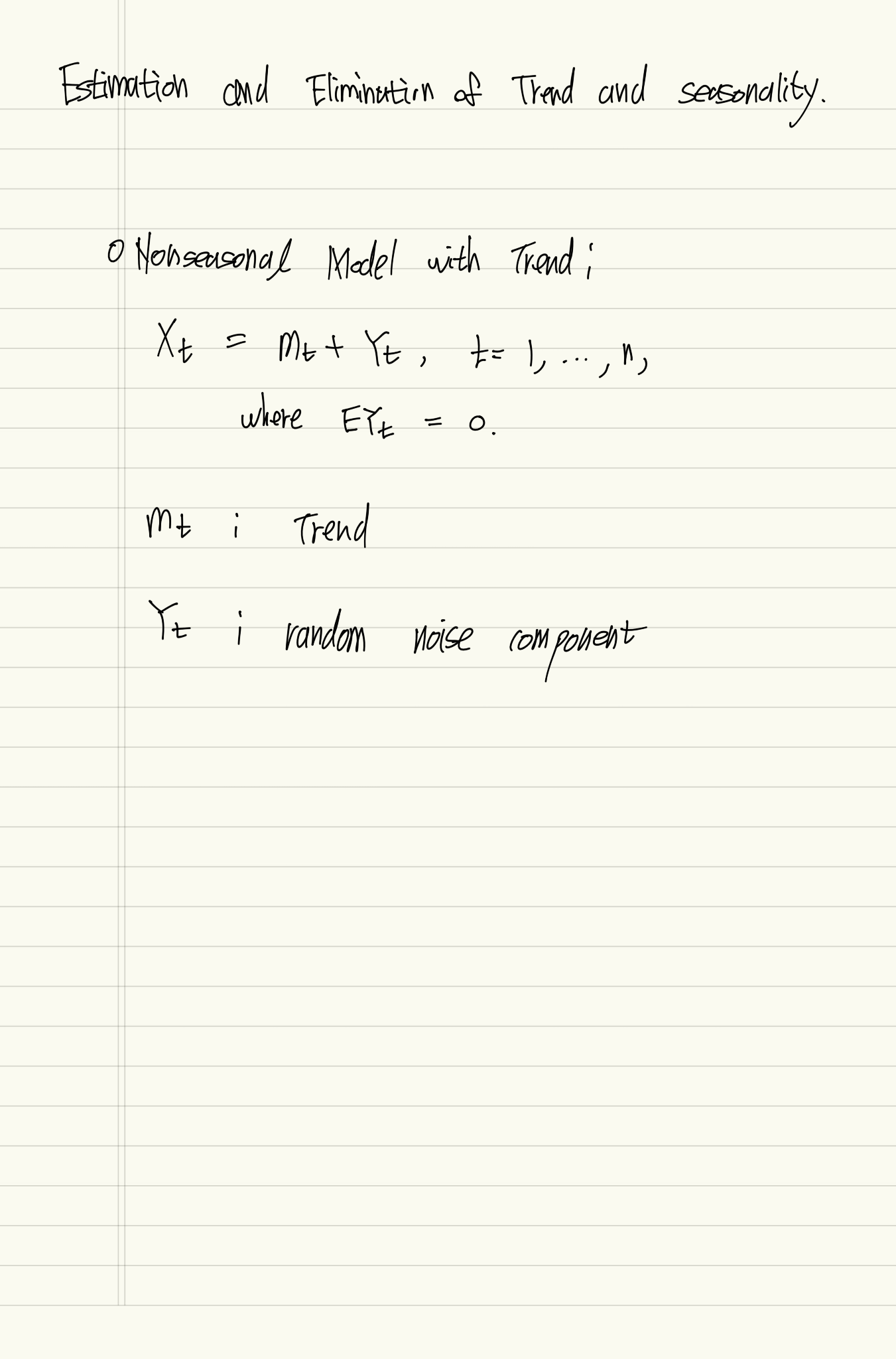
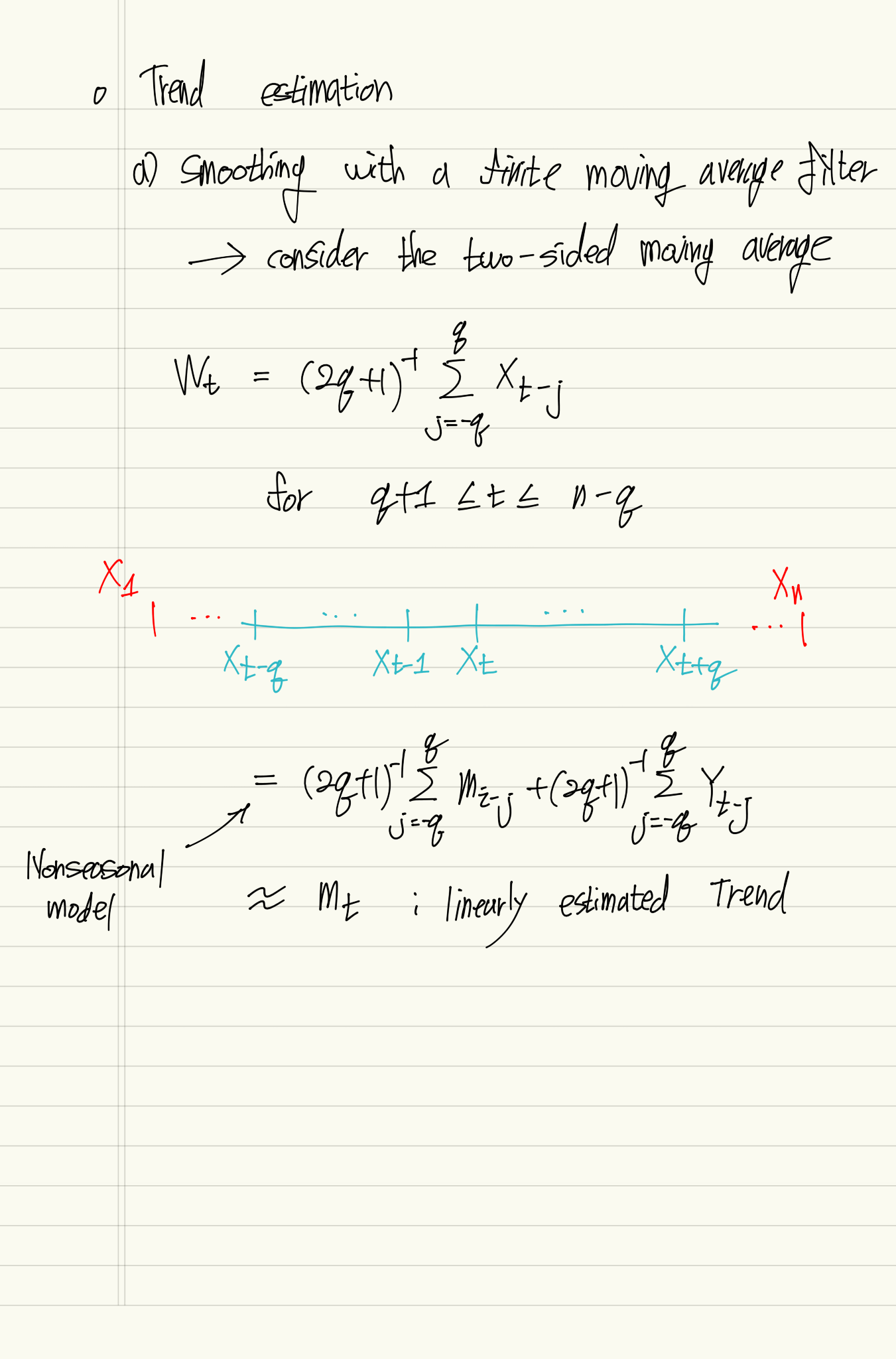
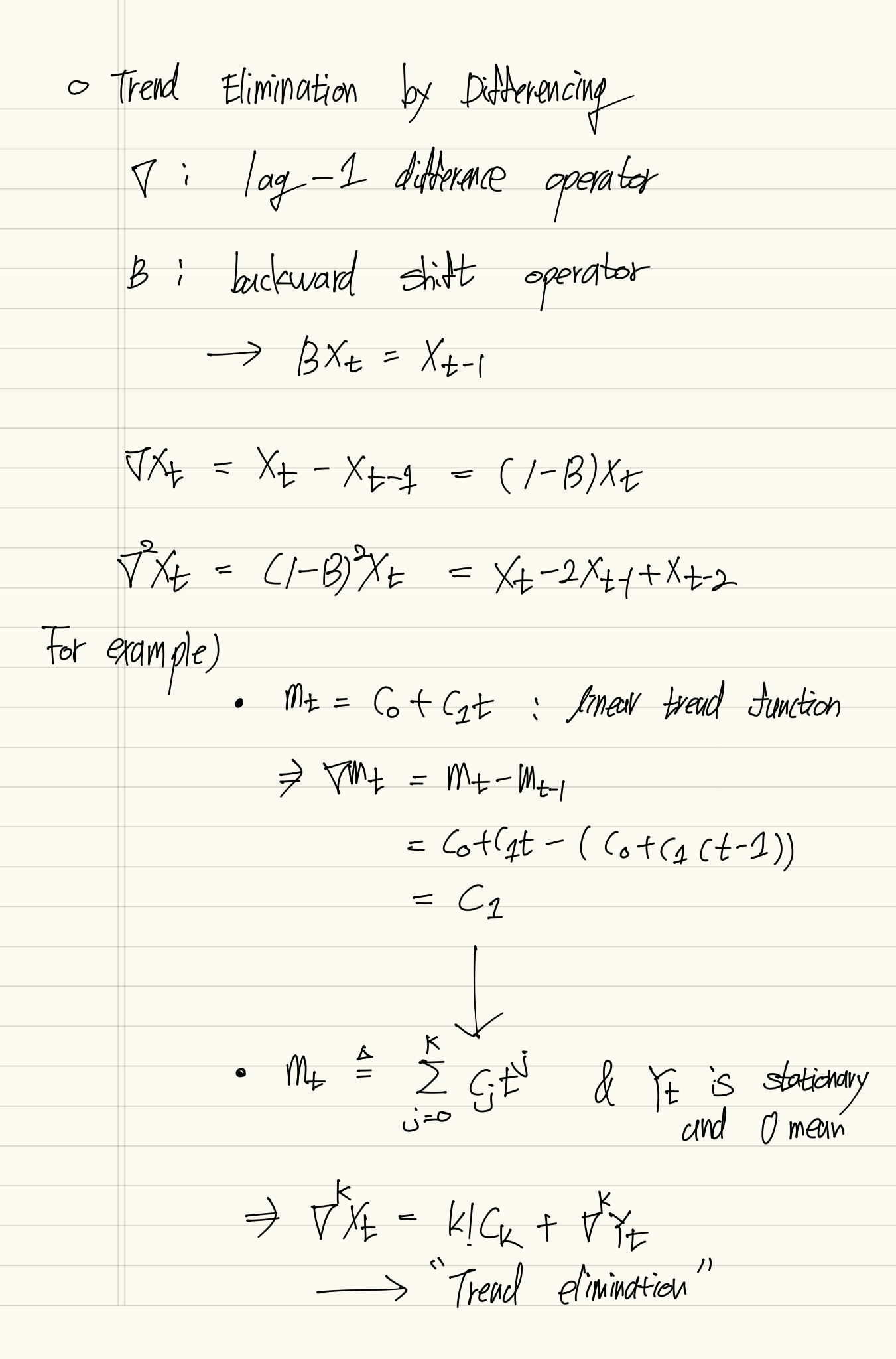
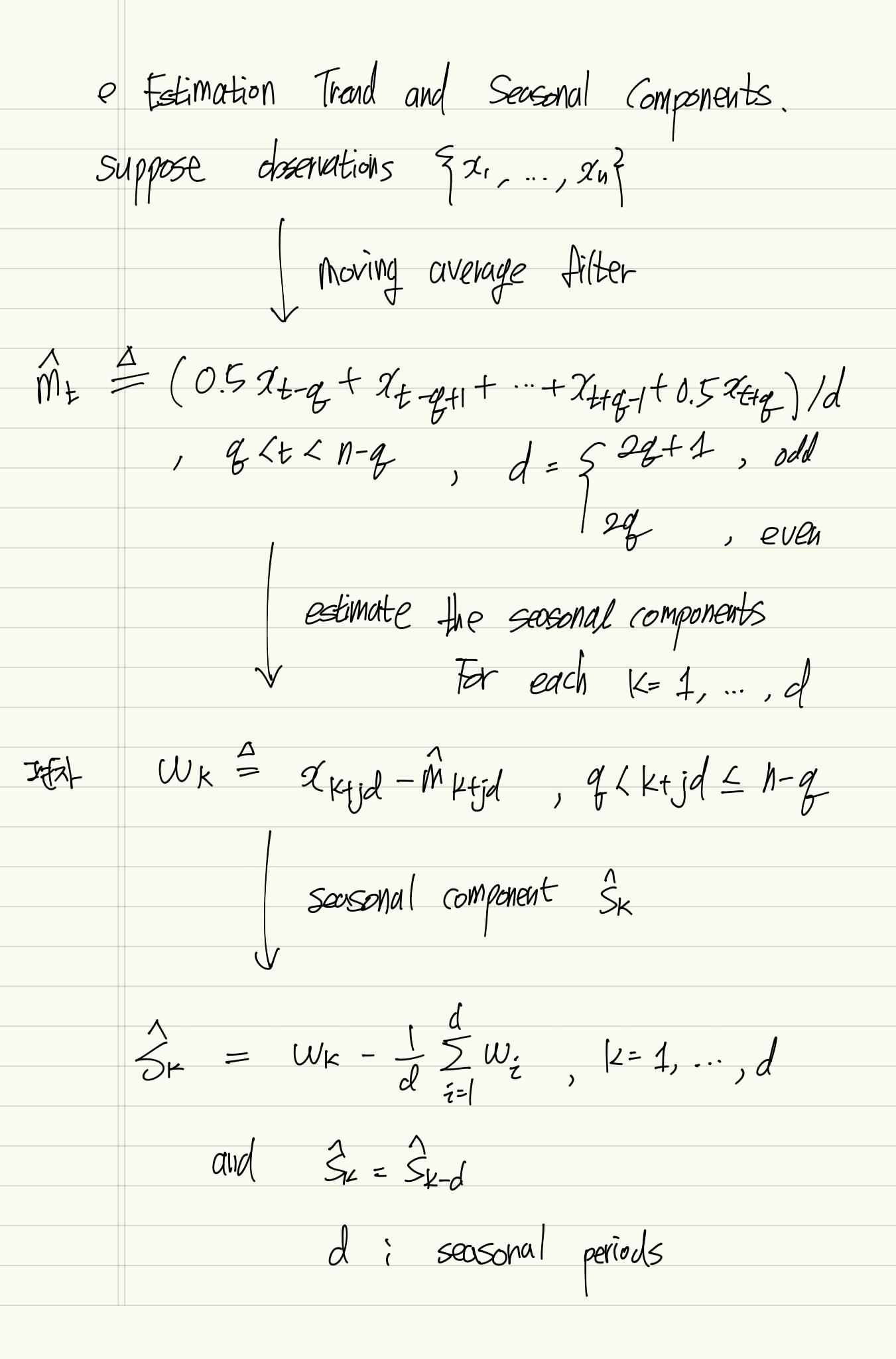
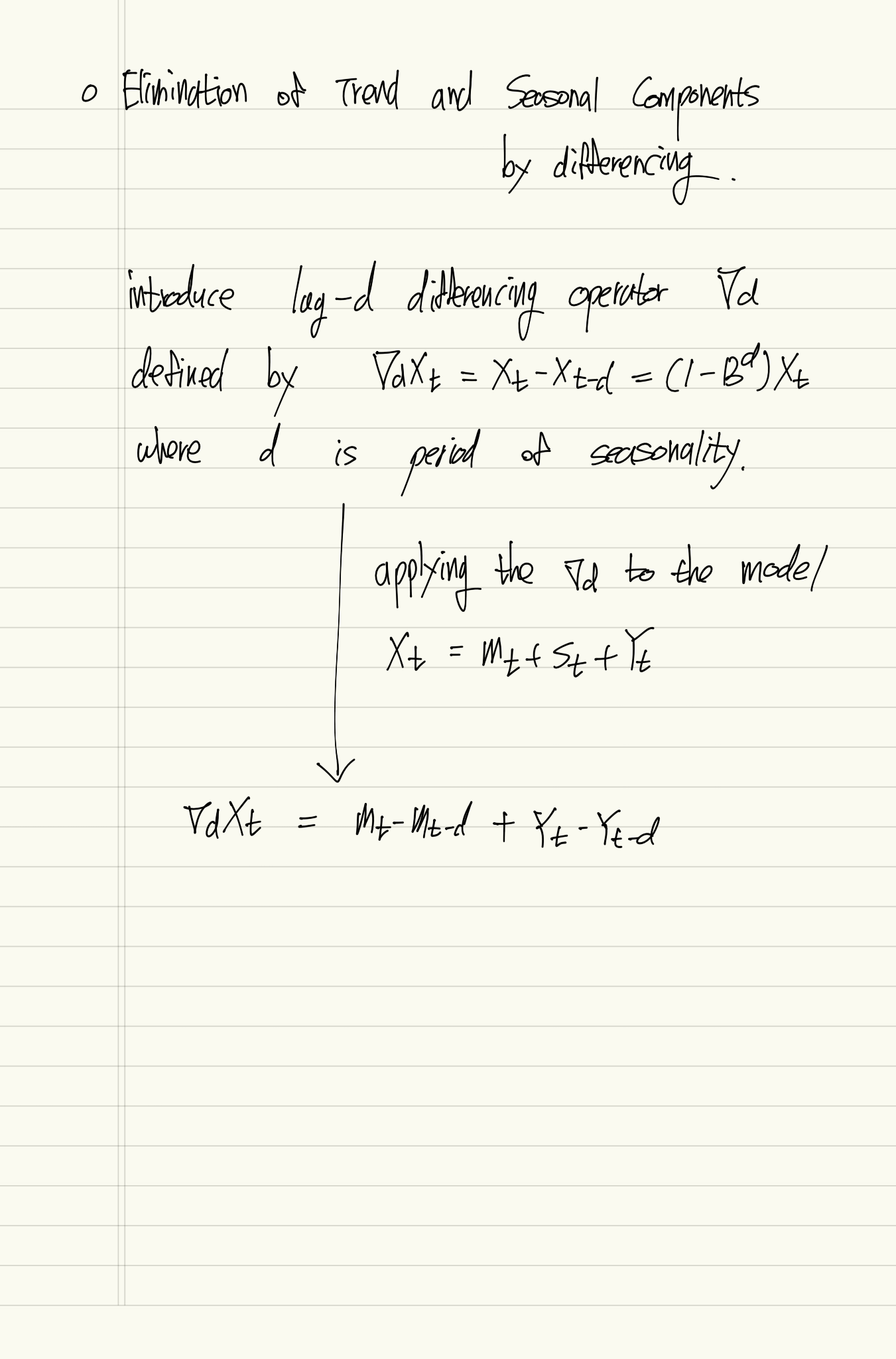
Estimation and Elimination of Both Trend and seasonality

Autoregressive model (AR)
자기자신을 통한 예측과정이라고 할 수 있고 AR(p)는 다음과 같이 정의된다.
white noise
혹은 이와 동등하게 다음과 같이 정의된다.
back shift operator (lag operator)
stationary condition은 characteristic equation을 통해서 구해진다.
https://m.blog.naver.com/PostView.naver?isHttpsRedirect=true&blogId=jahyone20&logNo=220933491078
Moving Average model (MA)
MA(q)는 다음과 같이 정의된다.
: white noise error term
: mean
back shift operator를 이용한 정의는 다음과 같다.
Autoregressive moving average model(ARMA)
Def of ARMA(p,q)
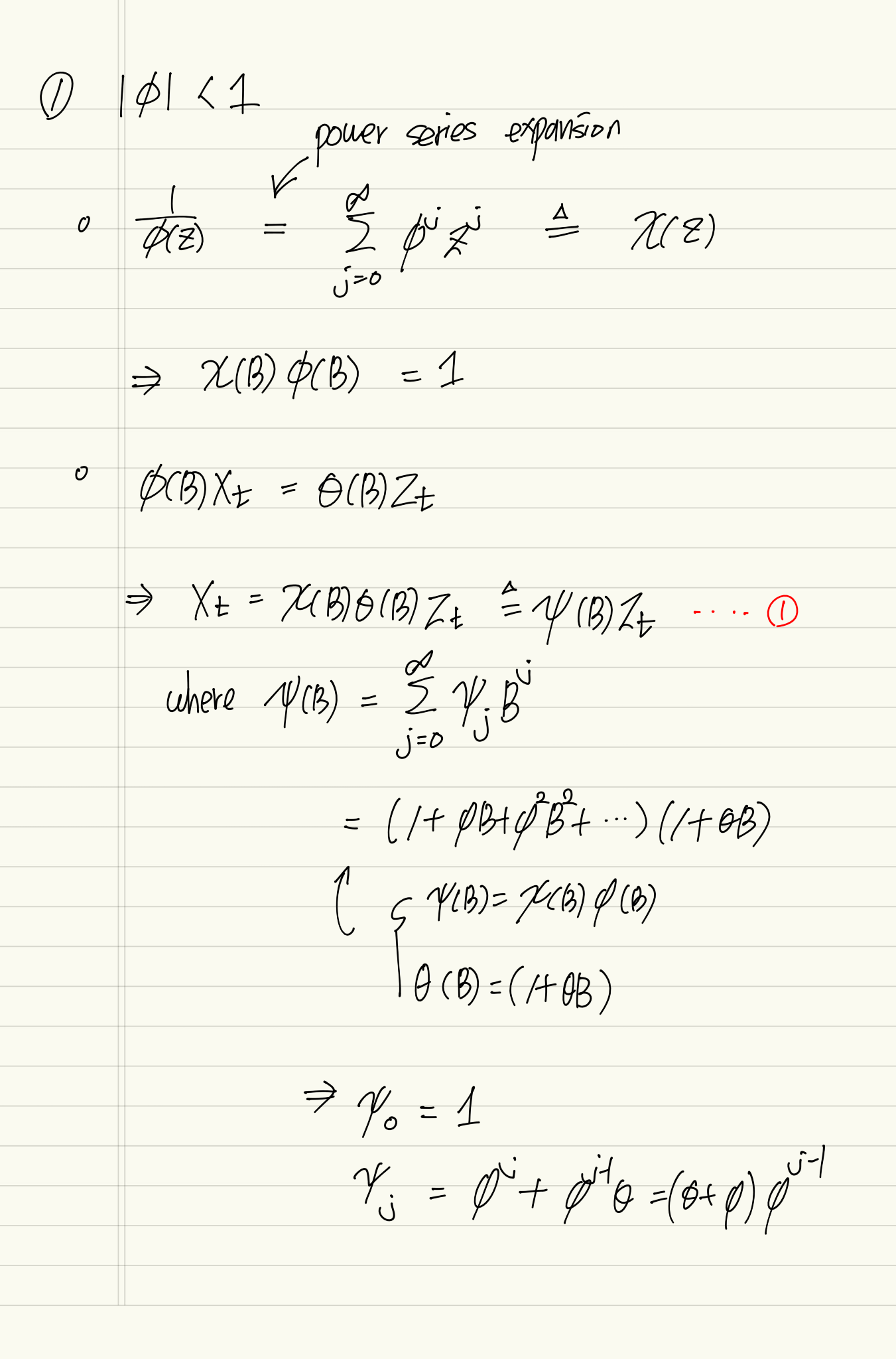
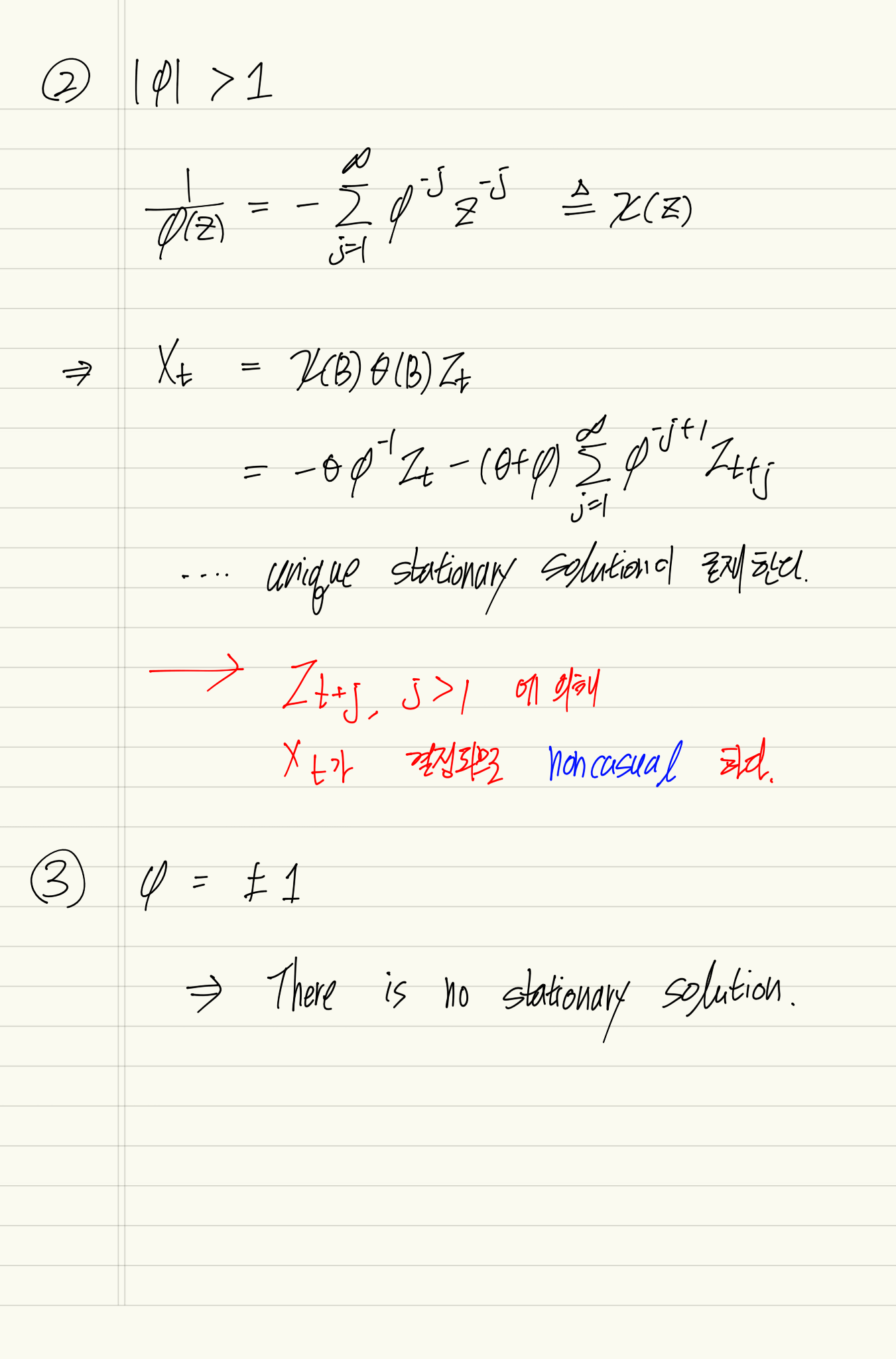
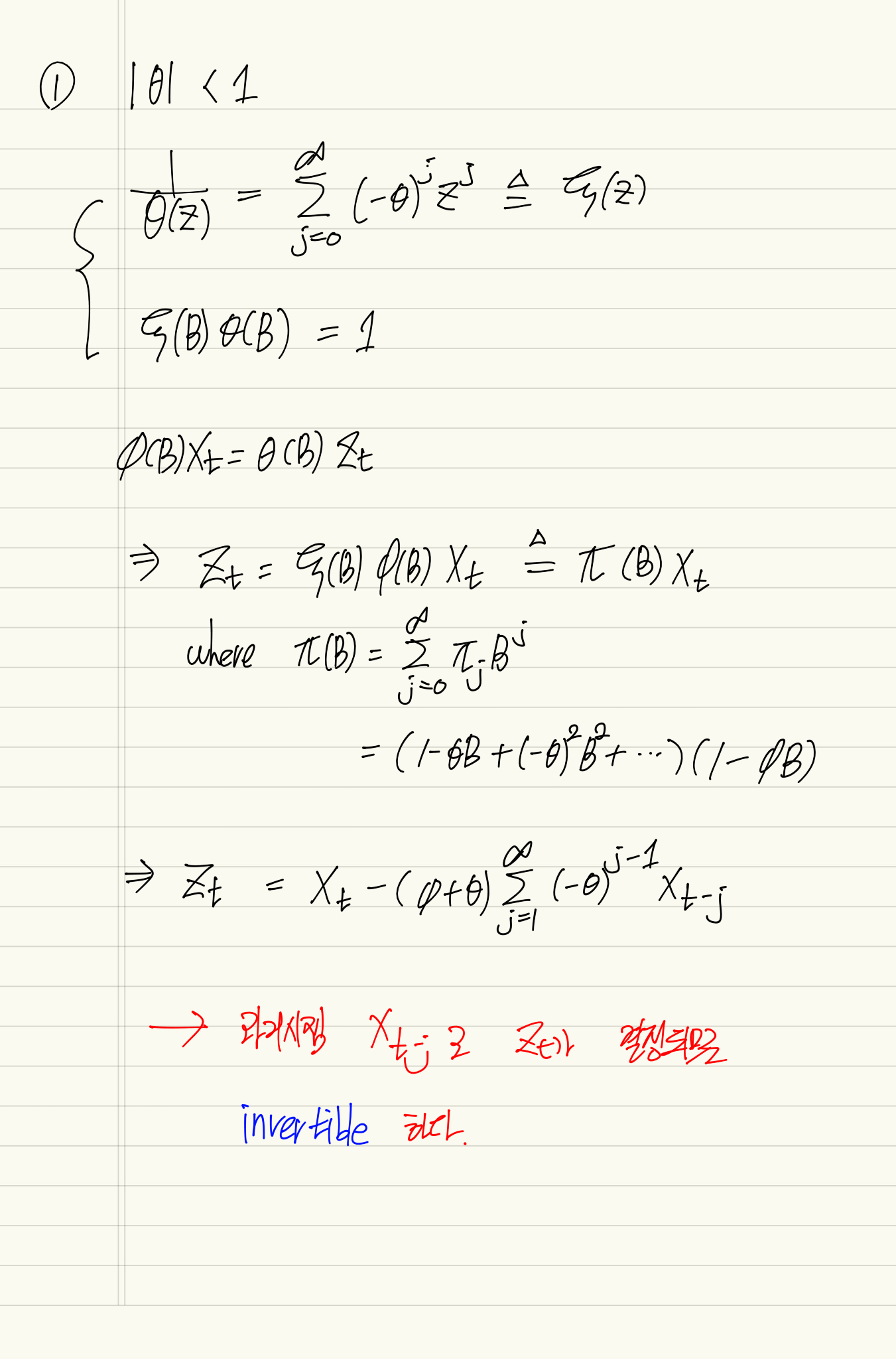
Case of ARMA(1,1)
where ~ and
or
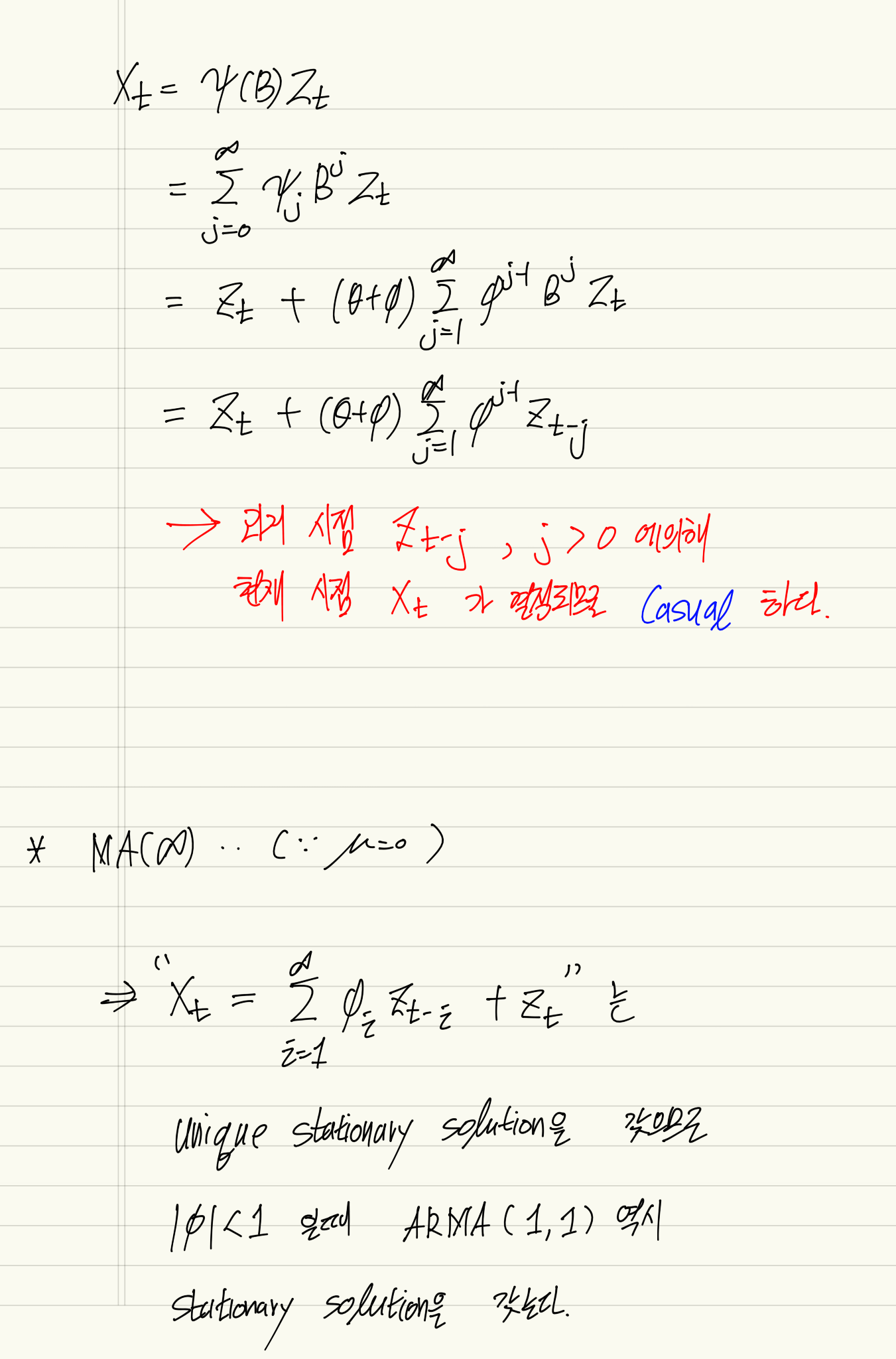
Existence of stationary solution
invertible / noninvertible
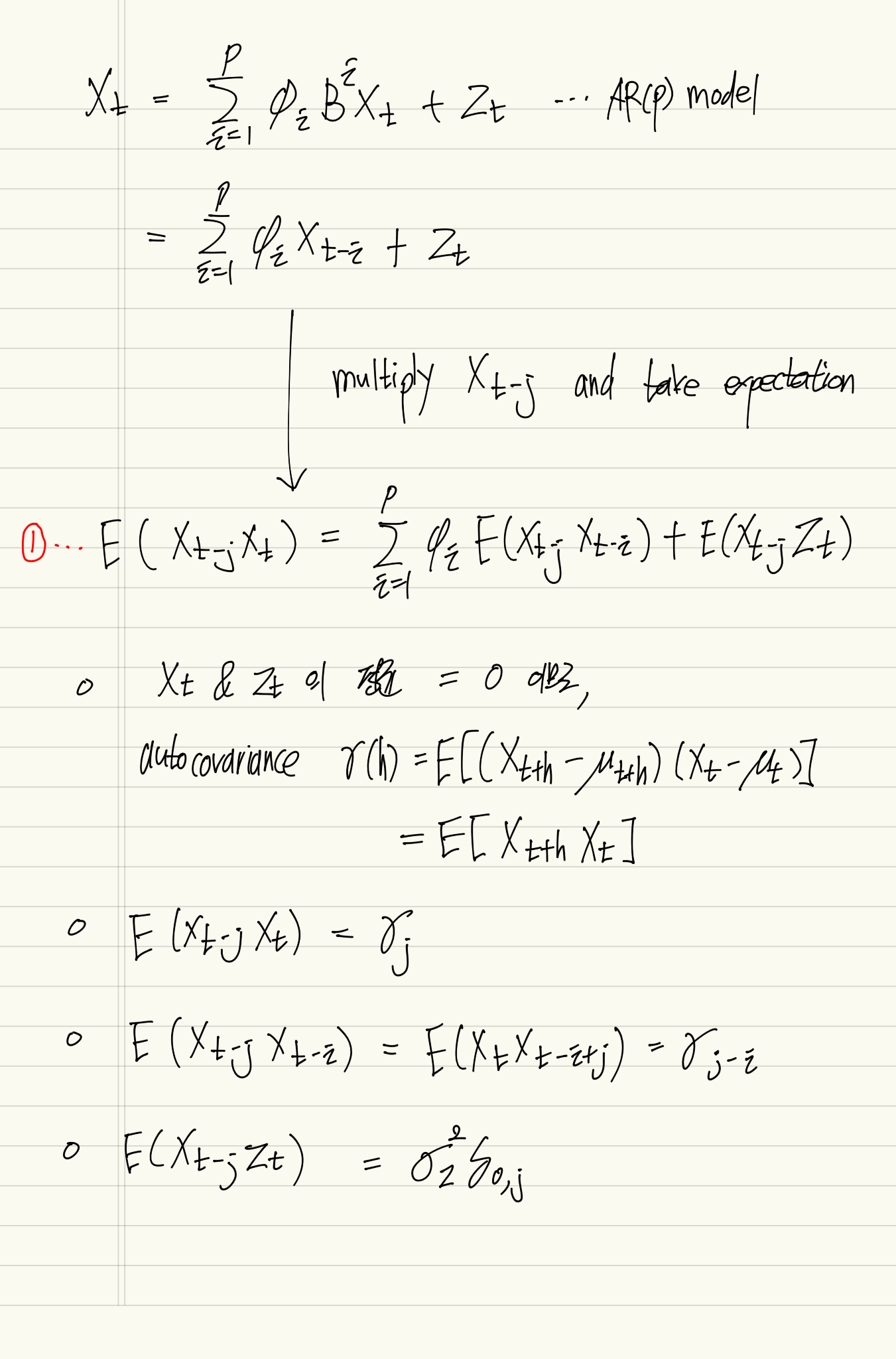
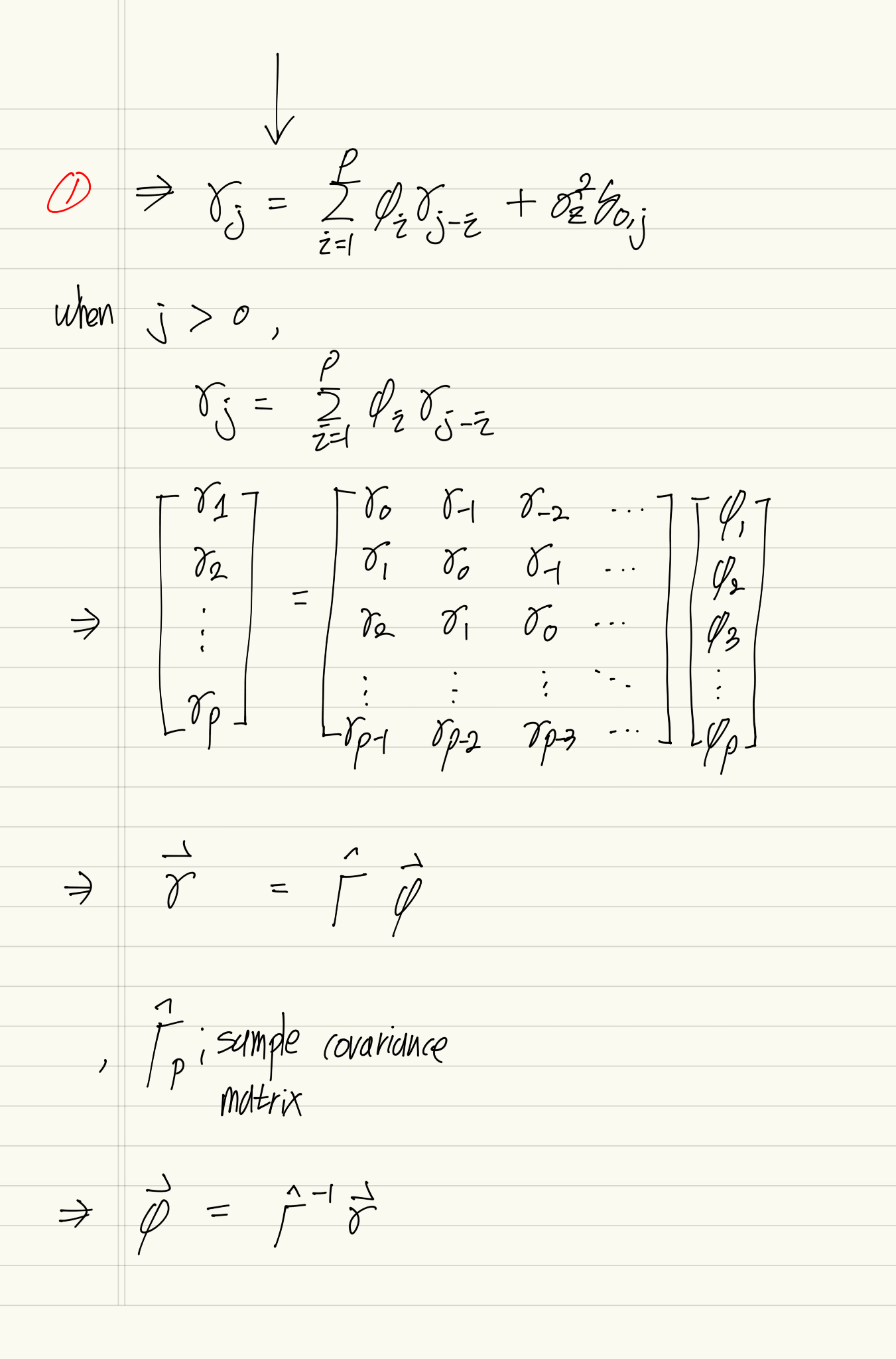
Yule-Walker Estimation
Yule-Walker Equation을 통해 time series model의 parameter를 추정하는 방법이다.
AR model의 경우는 다음과 같다.
Bartlett’s Formula
...
Multivariate ARMA
...
State-Space Representations
State-Space model은 아래 두개의 방정식으로 구성되는
time series , 를 말한다.
, : observation equation
, : state equation
where
,
, is sequence of x matrices
, is sequence of x matrices
, is -dimensional state variable
, is -dimensional observation
and is uncorrelated with ( i.e for all )
ARMA(1,1) process
