
MST (Minimum Spanning Tree)
- 모든 노드를 연결하되, 간선 가중치 합이 최소가 되도록 만드는 트리
- 출발 노드라는 개념이 없음
ex) 전체 네트워크 구축 비용을 최소화하고 싶을 때
-> MST의 경로는 “최단 경로”를 보장하지 않음!SPT (Shortest Path Tree)
- 특정 시작점(여기서는 1번)에서 모든 노드까지의 최단경로만 모은 트리
- 다익스트라 + prev 배열로 구하기
ex) 특정 시작점에서 모든 노드까지 최단경로를 보장하고 싶을 때- 문제 요구사항: “1번에서 다른 노드까지 최단 통신망 복구”
from collections import defaultdict
import heapq, sys
input = sys.stdin.readline
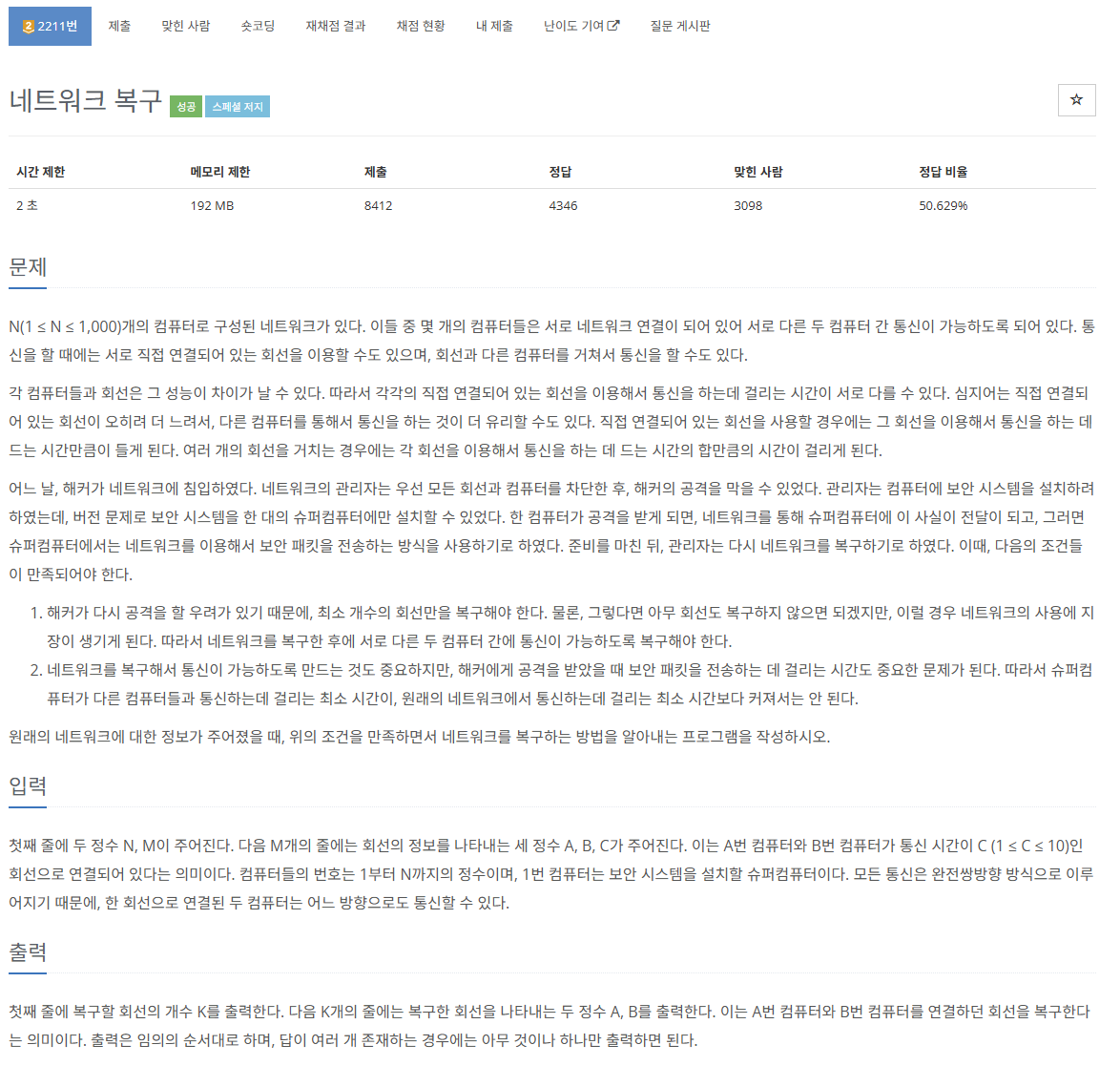
# 최소 개수 회선 복구
# 슈퍼 컴퓨터가 다른 컴퓨터와 통신하는 데 걸리는 최소 시간 < 원래의 네트워크에서 통신하는데 걸리는 최소 시간
n, m = map(int, input().split())
graph = defaultdict(list)
for i in range(m):
line = list(map(int, input().split()))
a, b, c = line[0], line[1], line[2]
graph[a].append((b, c))
graph[b].append((a, c))
def dijkstra(graph, start, n):
hp = []
dist = [float("inf")] * (n + 1)
dist[start] = 0 # 시작점 0으로 꼭 초기화!!!!
prev = [-1] * (n + 1)
heapq.heappush(hp, (0, start))
while hp:
cost, node = heapq.heappop(hp)
if dist[node] < cost:
continue
child = graph[node]
for next, weight in child: # 다음 노드, 비용 순 저장 주의!
new_cost = weight + cost
if dist[next] > new_cost:
dist[next] = new_cost
prev[next] = node
heapq.heappush(hp, (new_cost, next))
return dist, prev
# def get_path(prev, end):
# curr = end
# path = []
# while curr != -1:
# path.append(curr)
# curr = prev[curr]
# return path[::-1]
dist, prev = dijkstra(graph, 1, n)
# all_path = set()
# for i in range(2, n + 1):
# path = get_path(prev, i)
# # print(path)
# for j in range(len(path) - 1):
# p = (path[j], path[j + 1])
# all_path.add(p)
print(n - 1) # 항상 SPT의 전체 엣지 수는 n - 1개
for i in range(2, n + 1):
print(i, prev[i])
# print(len(all_path))
# while all_path:
# a, b = all_path.pop()
# print(a, b)