Uncovering High-Order Cohesive Structures: Efficient (𝑘,𝑔)-Core Computation and Decomposition for Large Hypergraphs
Graph Paper Reivew
목록 보기
2/2
Abstract
- Cohesive subgraph discovery
- Selecting appropriate parameters is an open question
- Aim to design an efficient indexing structure to retrieve cohesive subgraphs
1. Introduction
Limitation of existing approaches
- Existing approaches primarily handle pairwise relationships, relying on indirect representations of higher-order structures such as motif and cliques
- To better capture higher-order structures beyond pairwise interactions, hypergraphs have emerged as a more flexible structure where a single hyperedge can connect multiple nodes simultaneously
- -hypercore only consider neighbor constraint
- -core incorporates a degree constraint
Assumes that if any node in a hyperedge is removed, the hyperedge must also be discarded
Co-occurrence pattern
- Accounts for the frequency of repeated interactions between nodes in hypergraphs
2. Problem Statement
Notations and Definition
- : the count of hyperedges containing
- : the number of nodes in
Def 1. Support
- Support value with two nodes is the number of hyperedges in which both nodes co-occur
Def 2. 𝑔-Neighbour
- Given a node , and a support threshold , a node is called a -neighbour of if the support value between and is greater than or equal to ,
i.e., - Set of -neighbours of a node as
Def 3. (𝒌, 𝒈)-core
- Given a neighbour size threshold and a support threshold , is the maximal set of nodes where each node has at least neighbour nodes as its -neighbours within
Key properties of the (𝒌, 𝒈)-core
1. Uniqueness of -core
- The maximal subset of nodes satisfying the given and constraint within the hypergraph is unique
2. Containment of -core
- A hierarchical structure, meaning that both the -core and the -core are contained within the -core
3. (𝒌, 𝒈)-core Computation
Efficient Peeling Algorithm (EPA)
- The naive approach maintains an explicit -neighbour set for every node and continuously updates the pairwise co-occurrence counts
- EPA only tracks the number of -neighbours for each node
Pseudo Code
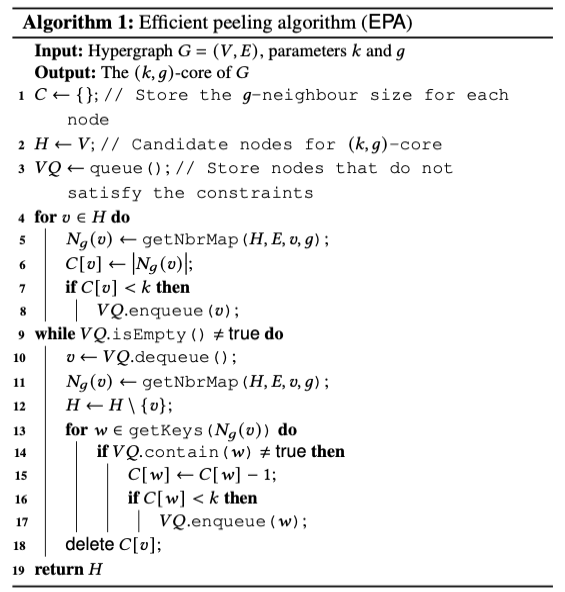
- Intially for each node, the size of its -neighbour is computed and recorded (4-6)
- Nodes that do not satisfy the -core criteria are identified and marked for removal (7-8)
- The number of -neighbours for each affected node is updated (13-15)
- The final set of nodes constitutes the -core
Time Complexity
- : the total sum of the degree of all nodes in the hypergraph
- : the maximum cardinality among all hyperedges
- To compute the -neighbours of a single node , examines each hyperedge containing ( such hyperedges)
- Iterates through up to nodes to identify those that co-occur with
- Resulting in a time complexity of
- Considering all nodes, the total becomes
Space Complexity
- Store only the size of -neighbours
4. (𝒌, 𝒈)-core Decomposition
4.1. Coreness of the (𝒌, 𝒈)-core
- The coreness of a node refelcts the maximum level of -core that the node can belong to,
indicating the intensity of engagement of each node within the network
Def 4. -coreness
- Given a positive integer , the maximum integer for which belong s to the -core but not to the -core
- The -coreness indicates maximal co-occurrence frequency that a node can have
Def 5. -coreness
- Given a positive integer , the maximum integer for which belong s to the -core but not to the -core
- The -coreness represents the highest levels of neighbour connectivity
Def 6. -coreness
- Given a node , the -coreness of a node is the maximal pairs such that is in the -core
but not in the -core or the -core, where and - A node can have multiple -coreness values as long as each is maximal
4.2. Bucket-based decomposition algorithm
Bucket-based Coreness Algorithm (BCA)
- Enumerate all possible -cores
- Remove duplicates by leveraging the hierarchical properties of the -core
Pseudo Code
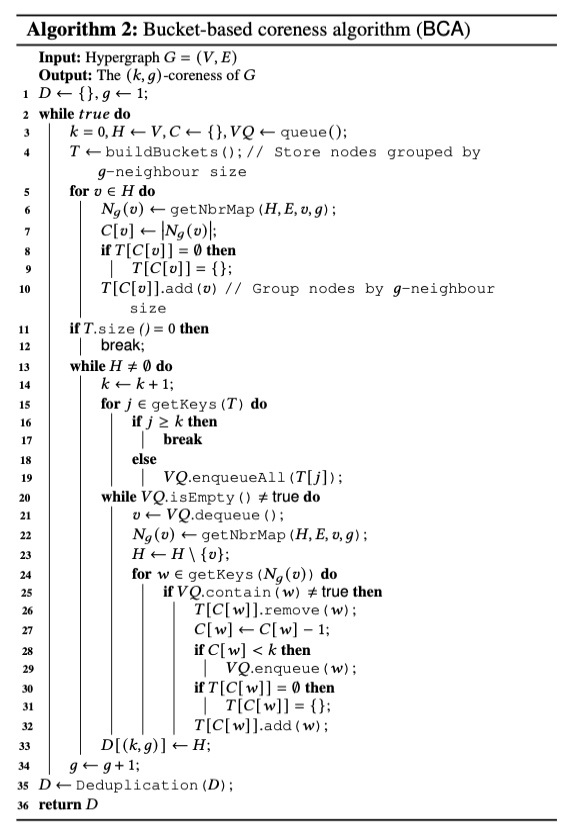
- Initially, is set to 0 and to 1
- For each node, the number of -neighbours is computed and nodes are assigned to buckets (5-10)
Can focus on only those nodes whose -neighbour count falls below a threshold rather than checking all nodes - Nodes that do not satisfy the constraint are marked for removal (14-20)
- After reducing their -neighbour count by one, the -neighbours of the removed nodes are reassigned to the buckets (21-27, 32)
- Any node whose updated -neighbour count falls below is also marked for removal and deleted in the next iteration (28)
DedDuplication
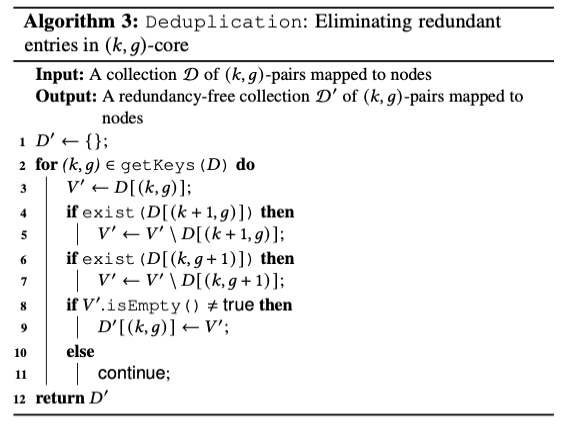
- If the node appears in a higher core value, it is removed from the current core
Time Complexity
- : the maximum value
- The process iterates up to
- Each iteration involves at most computations
Space Complexity
Three factors
- Storing the -coreness of each node
- Maintaining the count of -neighbours
- Grouping nodes based on their -neighbour count
- Storage requirement of the -coreness for every nodes is
- Storing the number of -neighbours for each node requires space
- Additionally, grouping can store up to nodes
5. Experiments
5.2 Experimental Setting
- -hypercore, nbr--core and -core identify strongly induced subgraphs, which means that any node removed must also discard all hyperedges containing it
5.3 Experimental Results
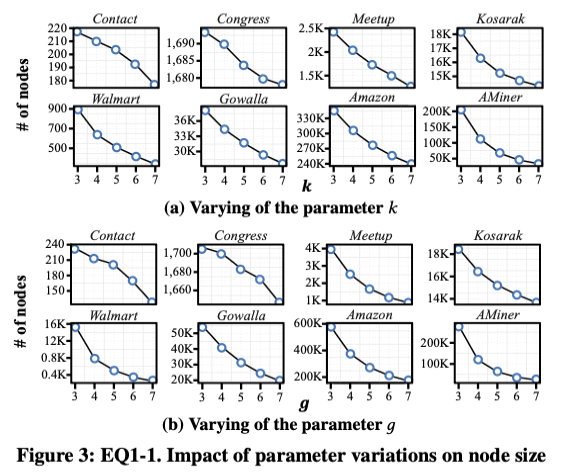
EQ1. Impact of Parameter Variations on Subhypergraph Co-hesion
-
To observe the impact of changing while keeping constant, fix and vary over the values 3~7
Similarly, fix and vary -
In the Contact dataset, the average degree drops when reaches 7
This occurs due to a substantial reduction in hyperedges resulting from stricter co-occurence constraints
EQ2. Running Time with Varying Parameters
EQ5. Comparison of -core with other models
- By incorporating both degree and co-occurrence constraints, resultant groups are dense subhypergraphs
EQ7. Distribution of -coreness and -coreness
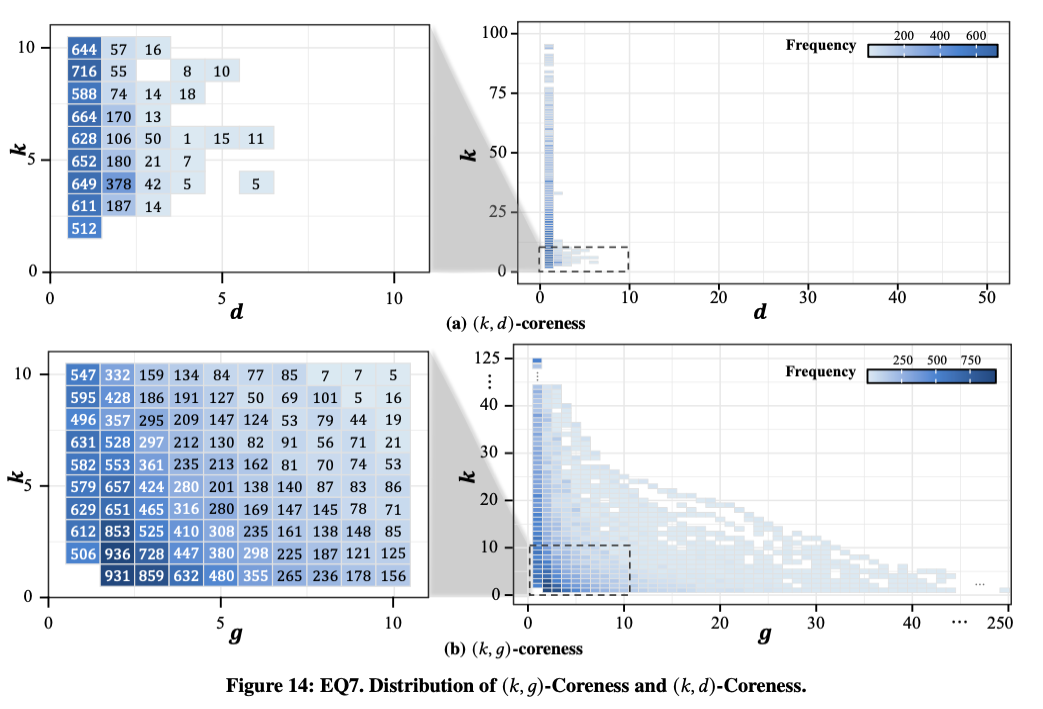
- -core enables more granular hierarchies, capturing a broader spectrum of internal cohesion levels
