영상 향상(Image Enhancement)
- 이미지 향상의 목적은 처리된 이미지가 특정 애플리케이션에 대한 원래 이미지보다 더 적합하도록 이미지를 처리하는 것
- cf) 이미지 복원 시 이상적인 이미지가 저하되었으며, 처리된 이미지를 최대한 원본 이미지와 닮게 하는 것이 목적임
- 영상 향상 기술의 분류
- Point operations: contrast manipulation, histogram modification`
- Spatial operations: noise smoothing, median filtering, edge sharpening
- Transform operations: linear filtering, homomorphic filtering
Point operations
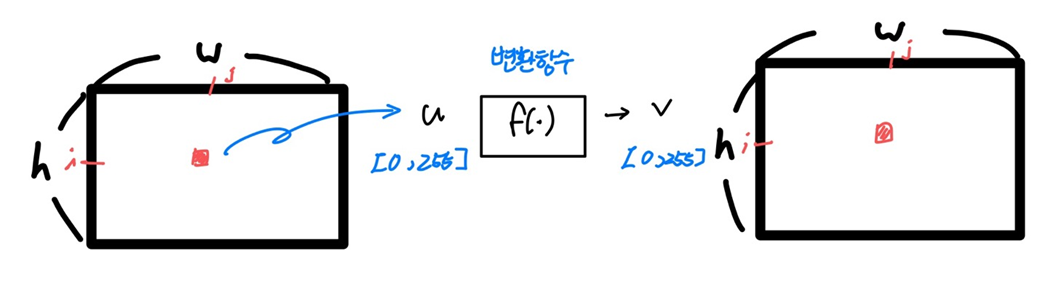
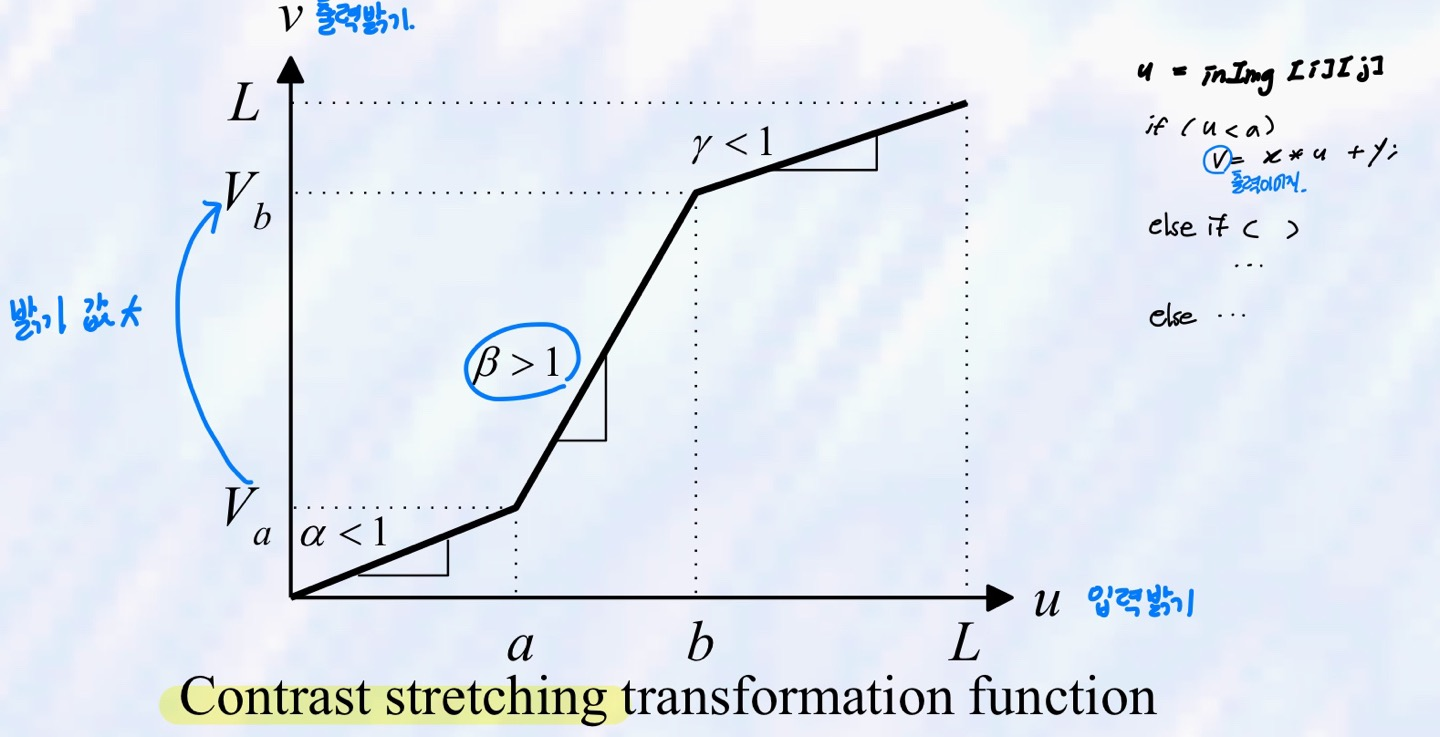
Contrast Stretching
- 저대비 영상은 종종 조도가 나쁘거나 균일하지 않거나 영상 센서의 비선형성 또는 작은 동적 범위로 인해 발생함
- Contrast Stretching의 아이디어는 처리 중인 영상에서 회색 레벨의 동적 범위를 늘리는 것임
- 변환 함수의 기울기는 확장 영역의 단일성보다 크게 선택됨
Clipping
- α = γ = 0인 경우를 클리핑이라고 함
- 이것은 입력 신호가 [a, b] 범위에 있는 것으로 알려진 경우 노이즈 감소에 유용함
- 또한 부호 없는 문자와 같이 제한된 수의 비트로 표시될 이미지에 대해서도 클리핑을 수행해야 함
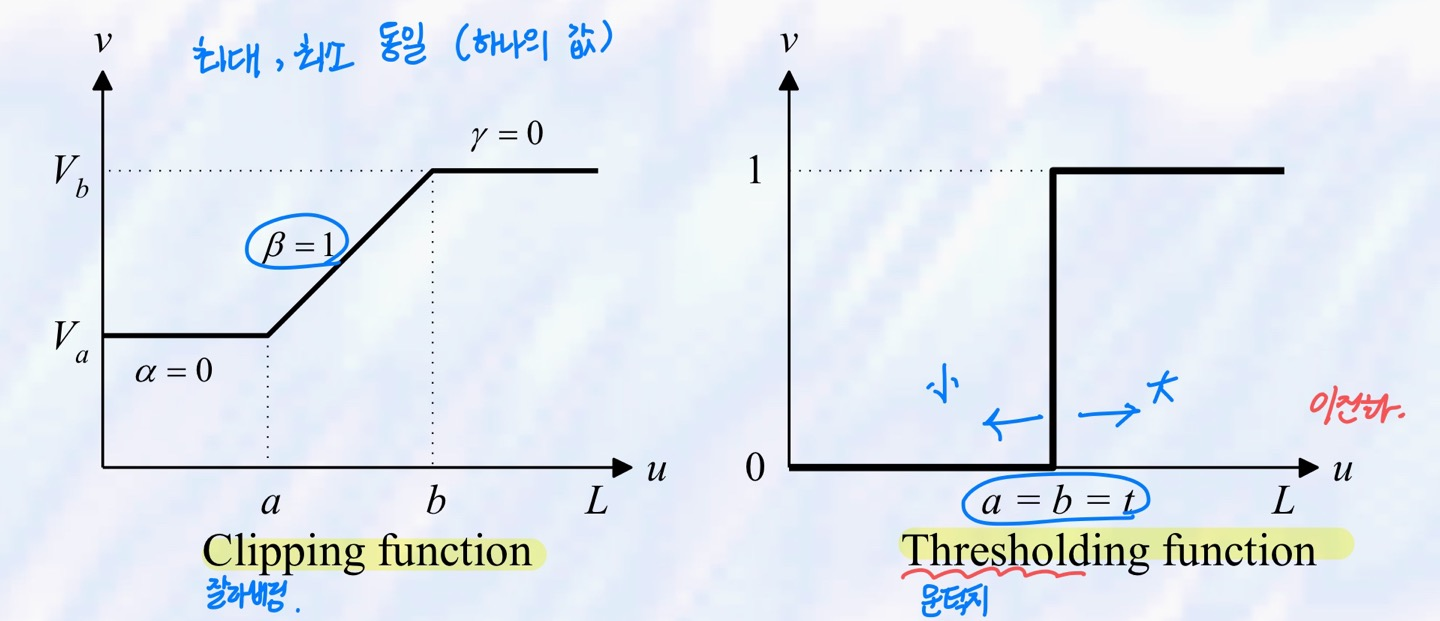
Thresholding
- a = b = t 및 출력이 이진수가 되는 클리핑의 특수한 경우임
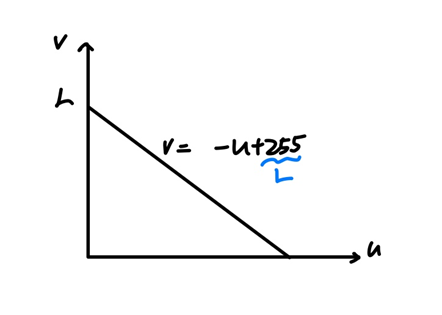
Image Negative
v = L - u
Range Compression
- 일반적인 단일 변환 이미지의 동적 범위는 매우 커서 몇 개의 픽셀만 볼 수 있음
- 동적 범위는 로그 변환을 통해 압축할 수 있음
결과값이 굉장히 큰 실수일 수도 있음 -> 그러나 0~255 범위읙 값을 원함
-> Rabge Compression
v = c log(1 + |u|)
cf) 처리 영상을 display
0~1 -> 0~255
수백만 -> Nomalization 사용 or Range Compression
Image subtraction (변화 검출)
- 많은 이미징 애플리케이션에서 두 이미지를 비교하는 것이 바람직함
- 간단하지만 강력한 방법은 두 이미지를 정렬하고 빼는 것임
v(i, j) = ax | u1(i, j) - u2(i, j)| + b
여기서 (i,j)는 각 픽셀 위치를 의미하며, u1과 u2는 비교되는 두 개의 이미지임
영상에서 scene이 바뀔 때 사용 -> Frame Difference
Histogram Modification
- 디지털 영상의 히스토그램은 영상에서 각 그레이 레벨의 상대적인 발생 빈도를 나타냄
- 히스토그램은 각 회색 수준의 발생 확률에 대한 추정치를 제공함
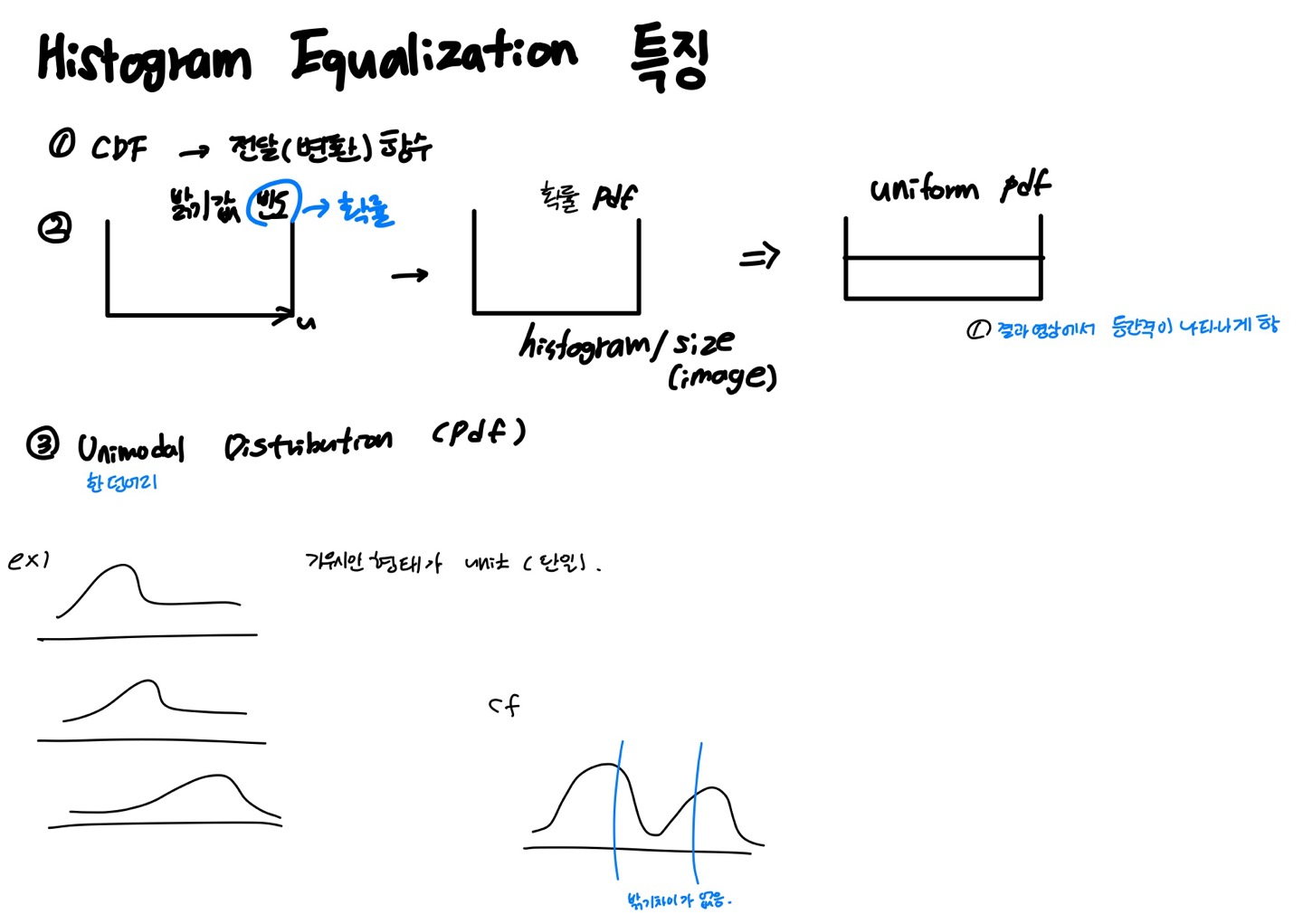
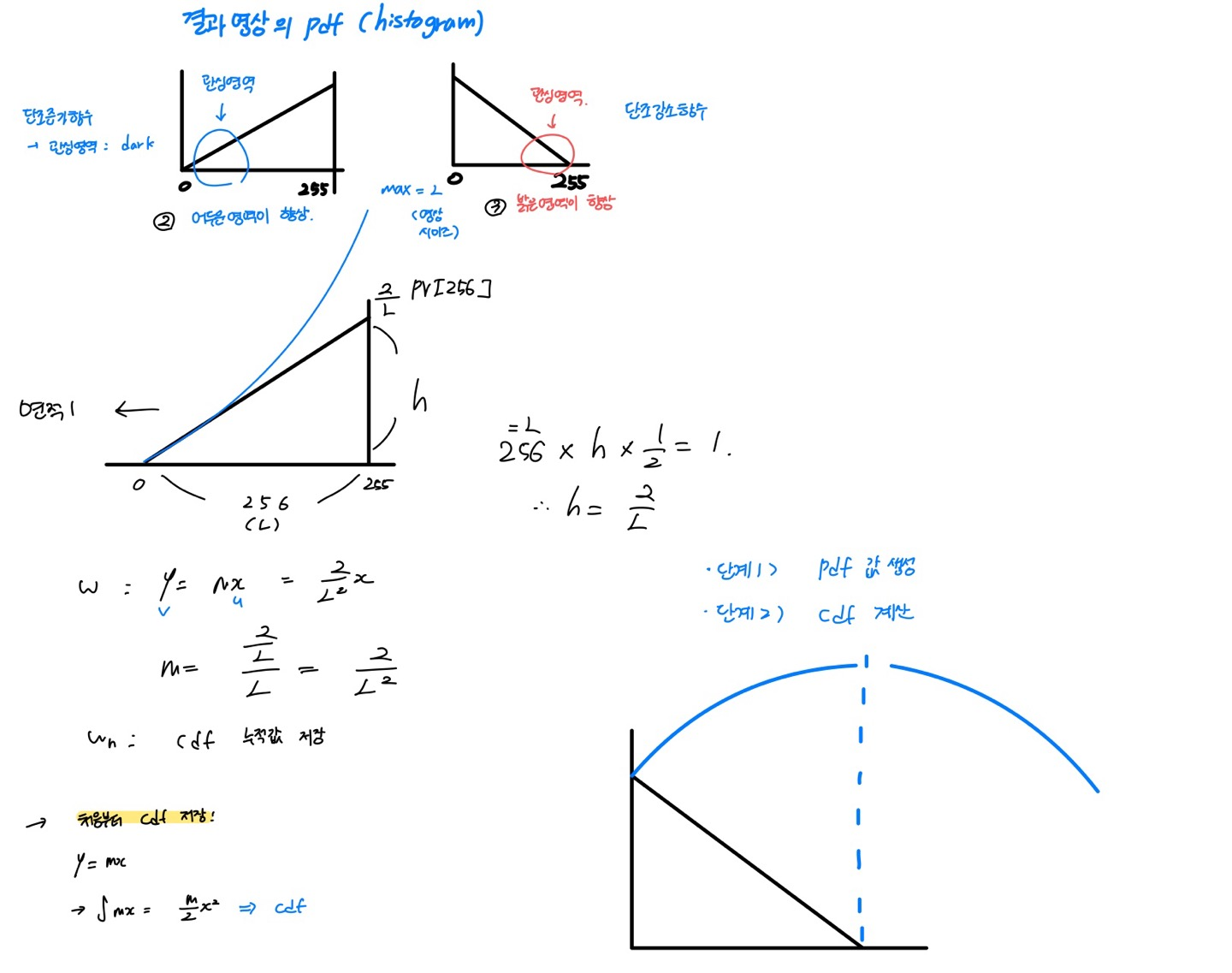
Histogram equalization
-
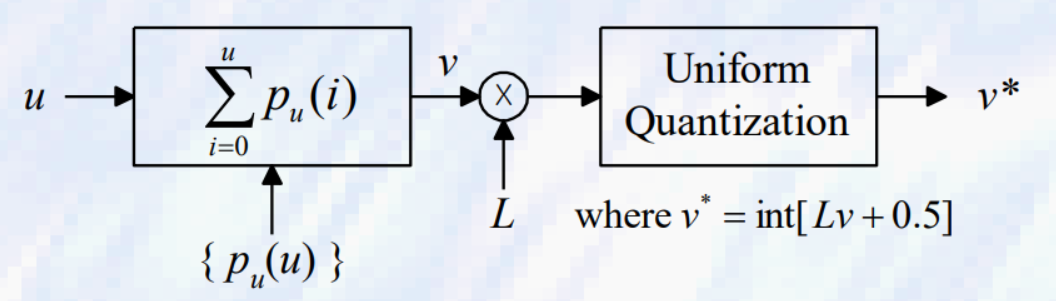
히스토그램 균등화에서 목표는 출력 영상에 대해 균일한 히스토그램을 얻는 것임
-
영상 픽셀 값 u>=0이 연속 확률 밀도 함수 pu(u)를 갖는 랜덤 변수라고 가정함
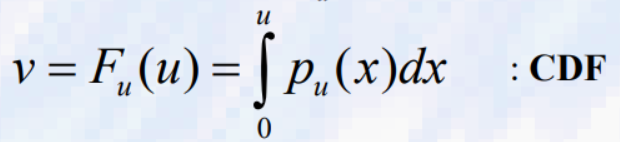
-
(0,1)에 걸쳐 균일하게 분포됨
-
u에 대한 v의 도함수는 다음과 같음
-
변환에 의한 pv(v)와 pu(u)의 관계 적용
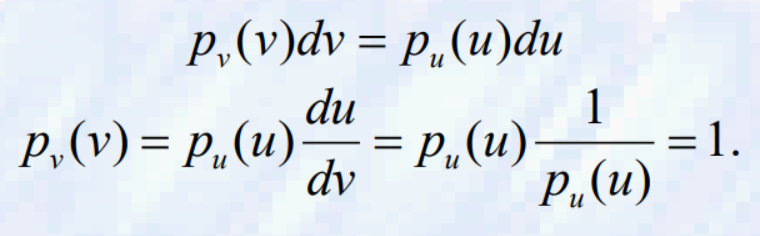
-
변환된 pdf, pv(v)는 균일한(uniform) pdf를 가짐
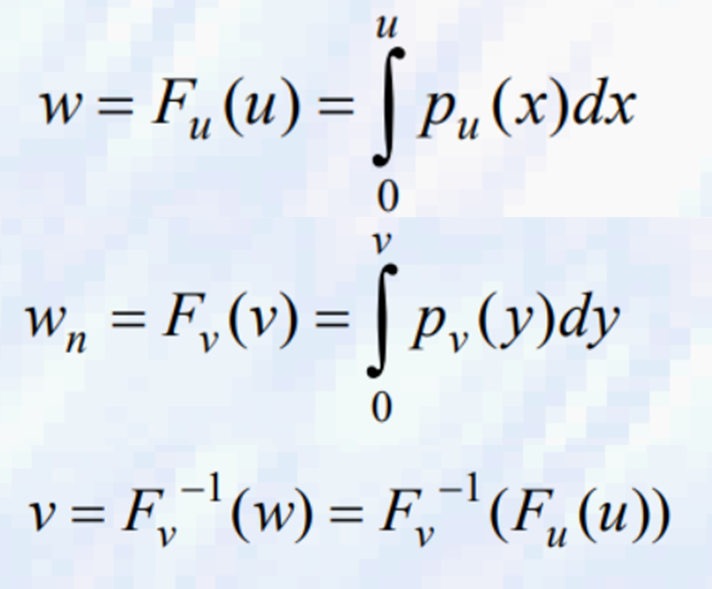
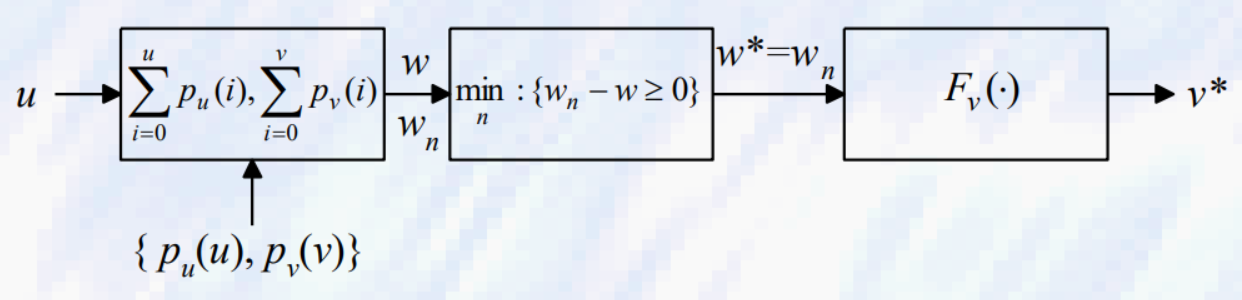
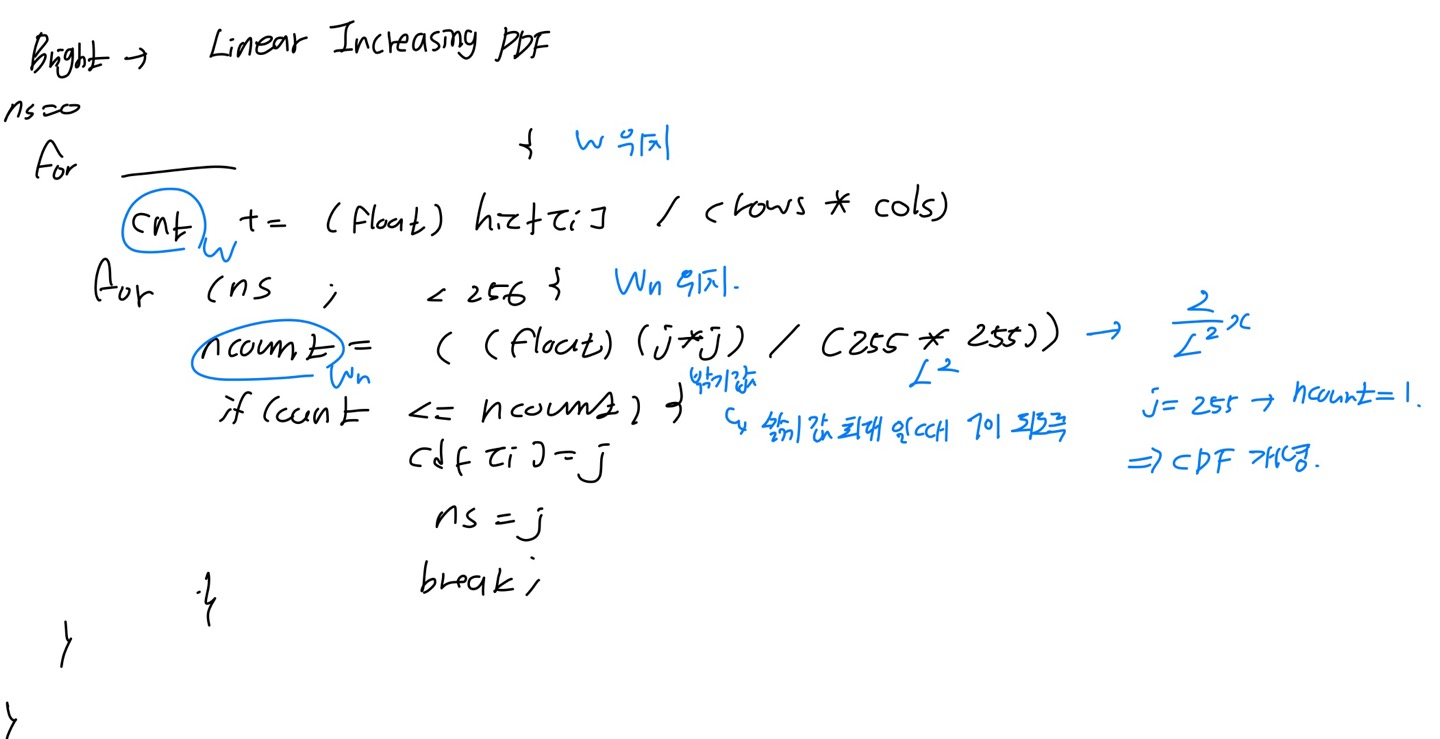
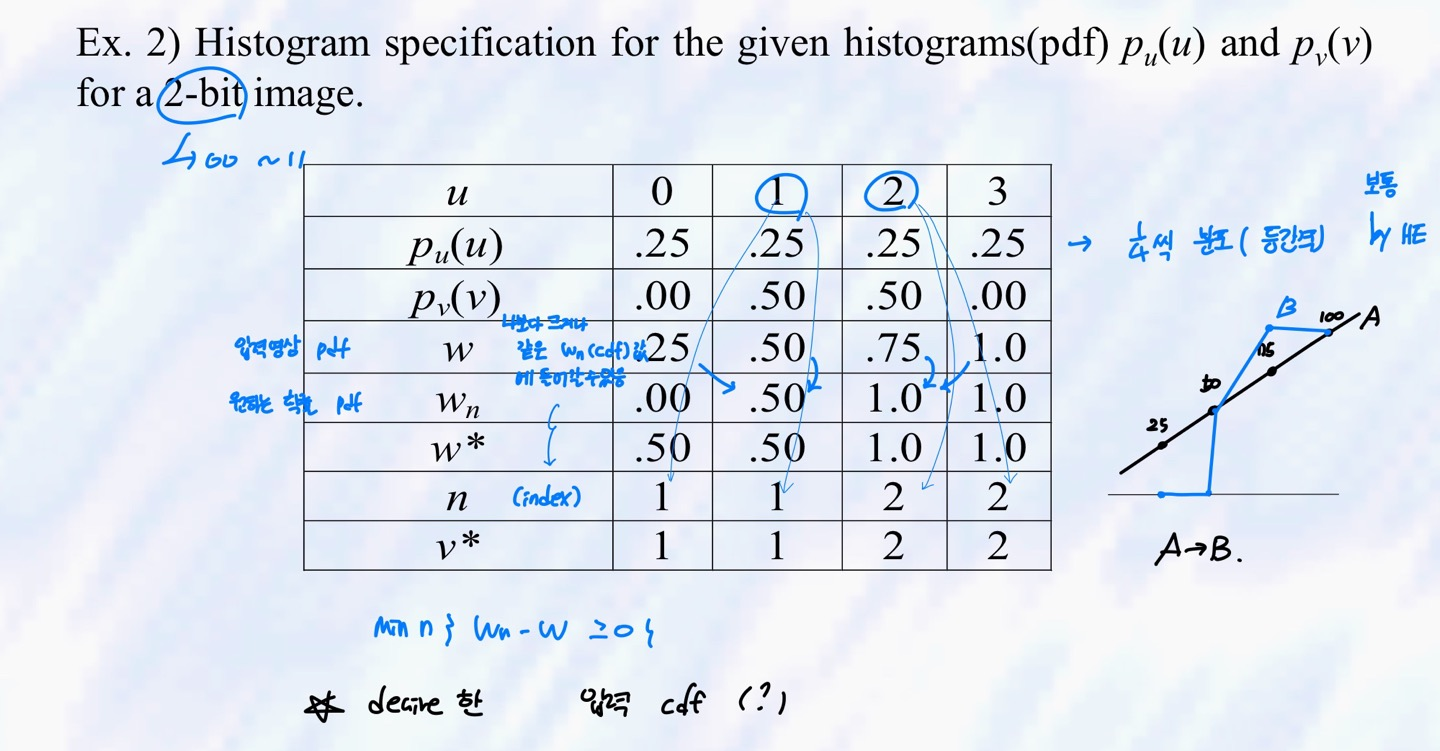
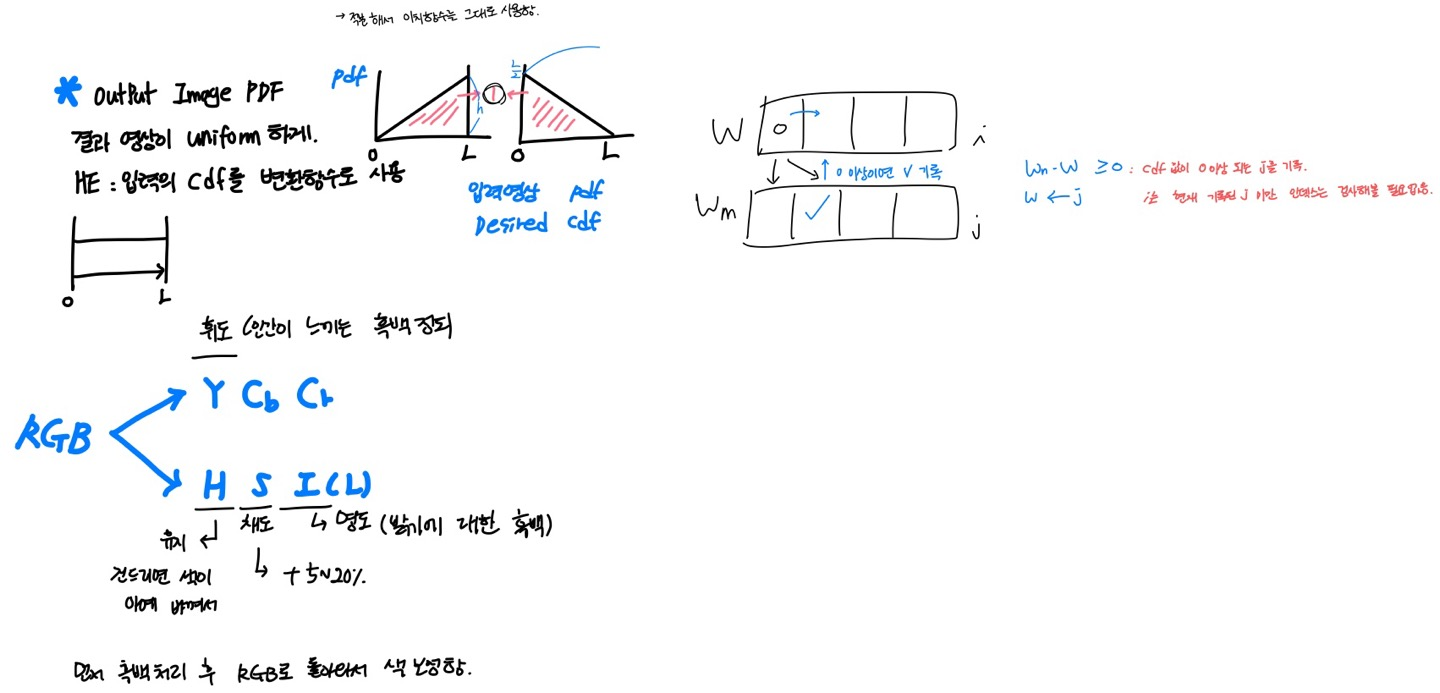
Histogram Specification
- Histogram specification의 목적은 특정 히스토그램에 분포를 매핑하는 것임
- 확률 밀도 pu(u)를 갖는 무작위 변수 u>=0을 v>=0으로 변환하여 지정된 확률 밀도 pv(v)를 갖는다고 가정하자.
- 이것이 사실이 되기 위해, 균일한 무작위 변수를 정의함
Spatial operations
Smoothing
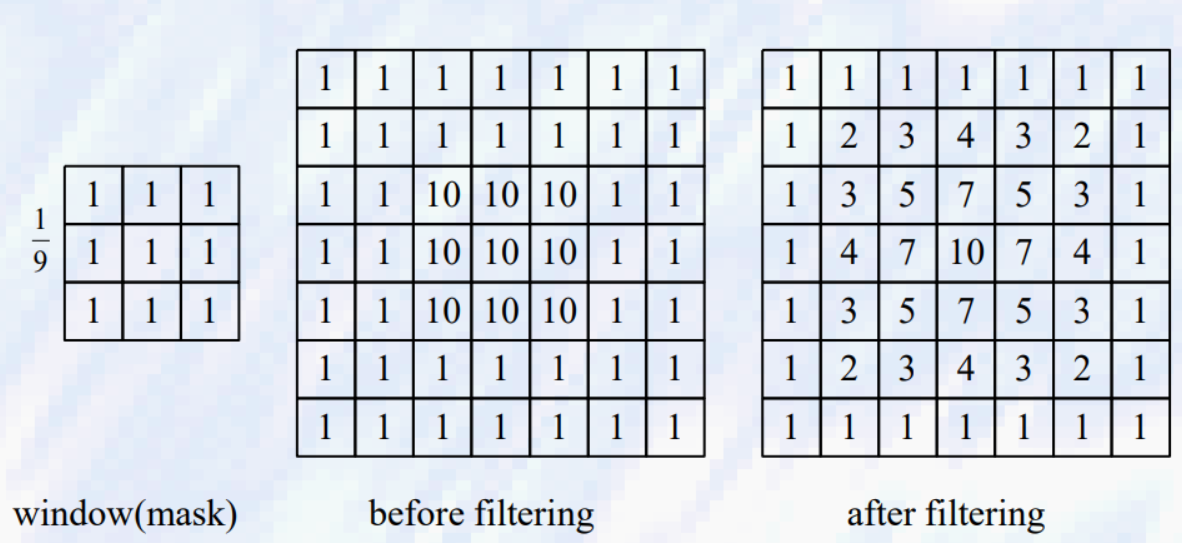
- 스무딩 필터는 블러링 및 노이즈 감소에 사용됨
- 블러링은 이미지에서 작은 세부 사항을 제거하는 것과 같은 전처리 단계에서 사용됨
- 각 픽셀은 이웃 픽셀의 가중 평균, 즉

-
여기서 y(m,n)와 v(m,n)는 각각 입력 및 출력 이미지이고, W는 적절하게 선택된 창이며, a(k,l)는 공간 마스크라고 불리는 임펄스 응답임
-
공간 평균 필터의 공통 클래스는 모두 동일한 가중치를 가지며, 다음과 같음
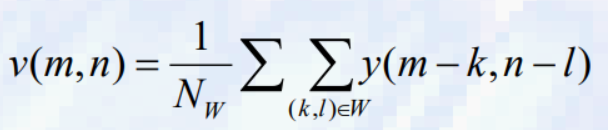
- a(k,l)=1/Nw 및 Nw는 창의 픽셀 수
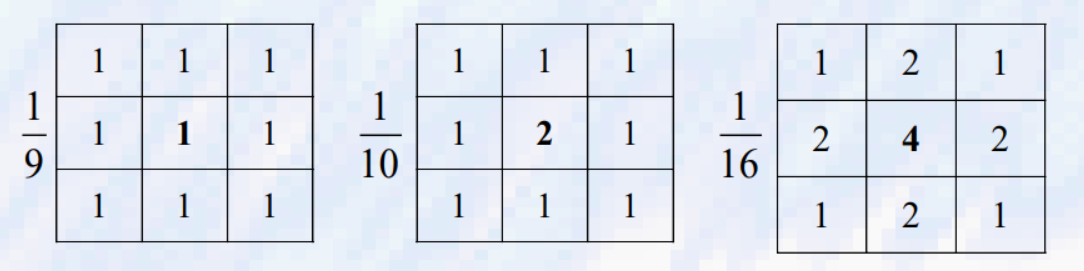
모든 LPF에서 모든 가중치의 합은 1이다.
- ex)
공간 영상은 입력/출력 공간을 따로 배정해야 함!
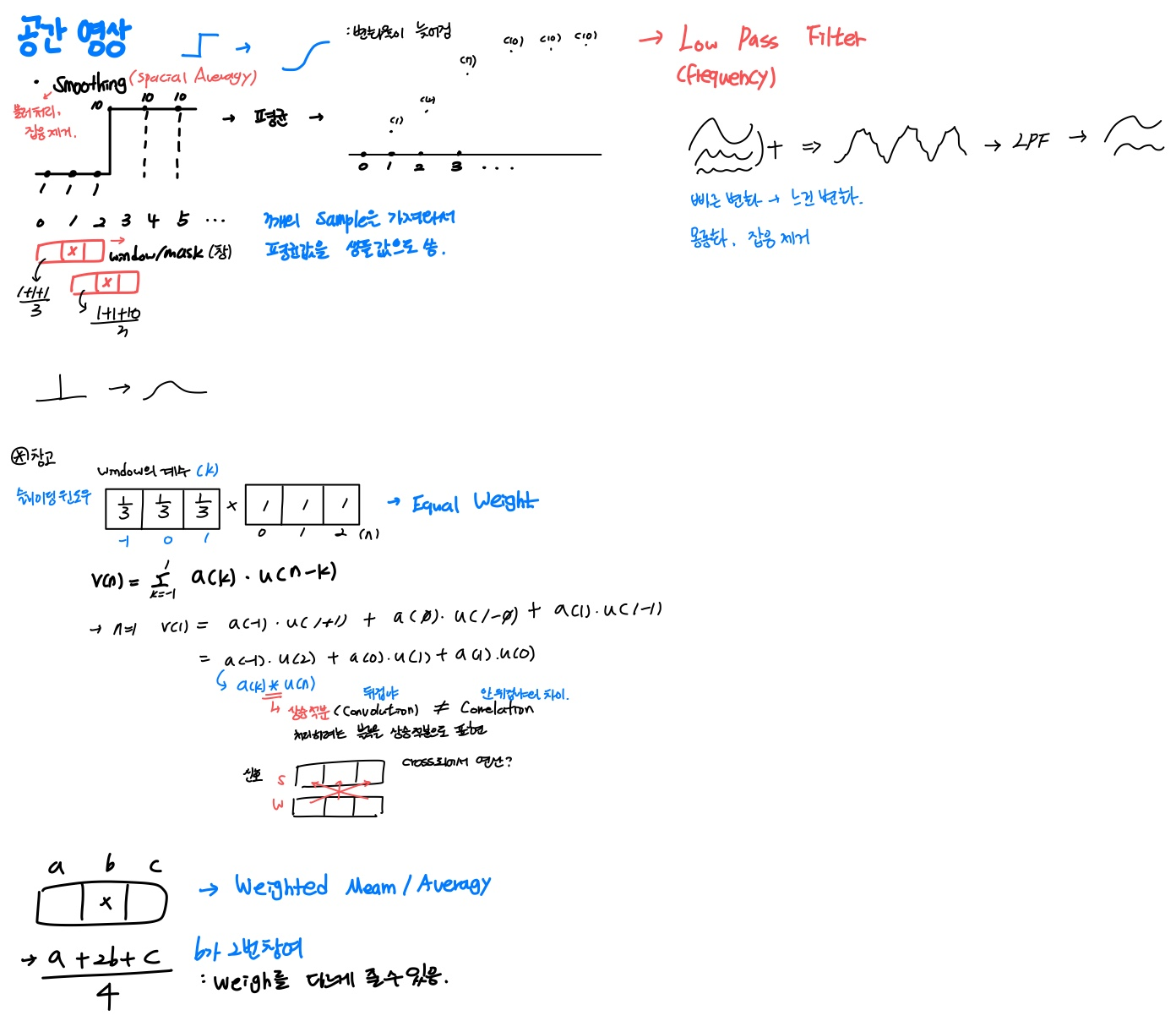
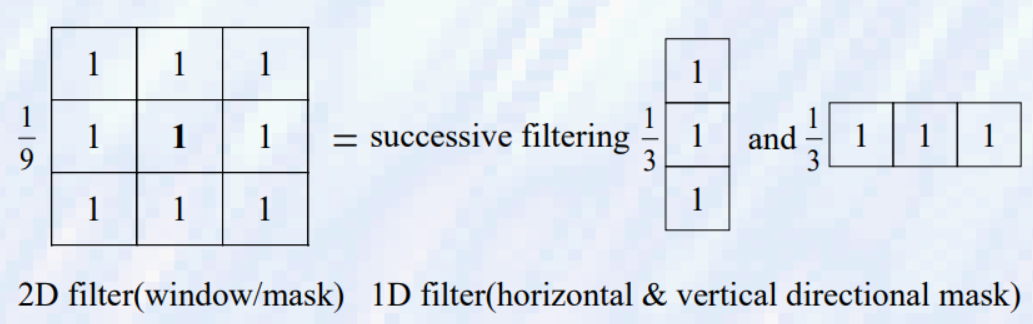
cf1) Separable Filtering
- 모든 선형 필터의 경우, n차원 필터를 사용한 차원 신호의 필터링 결과는 연속적인 n-time 1차원 필터링 결과와 동일함
cf2) Integral Image(적분 이미지)를 통한 빠른 Smoothing: 무게가 동일한 상자 필터에만 해당

- 단점
- Weighted Averagy는 적용 못함
- Euqal Weight만 가능
// horizontal for (int i = 0; i < cols; i++) { for (int j = 0. j < cols; j++) { if (j == 0 ) q[i * cols + j] = p[i * cols + j]; else q[i * cols + j] = p[i * cols + j] + q[i * cols + (i-1)]; } }Sn = Sn-1 + An
S0 = A0
p: An, q: Sn
for (int i = 0; i < cols; i++) {
for (int j = 0. j < cols; j++) {
q[j * cols + i] += q[(j-1) * cols + i];
}
}
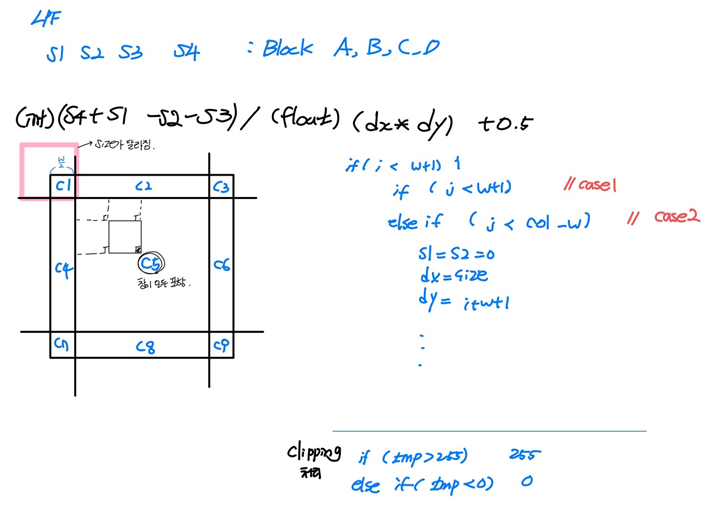
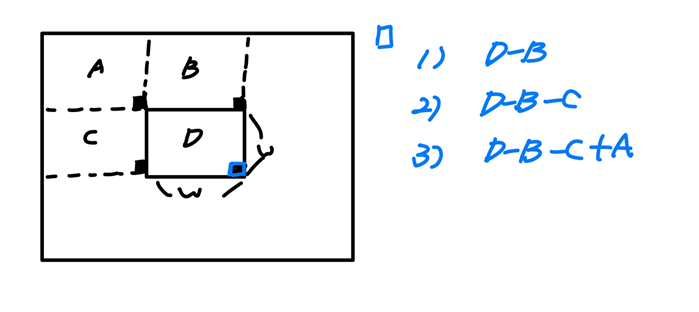
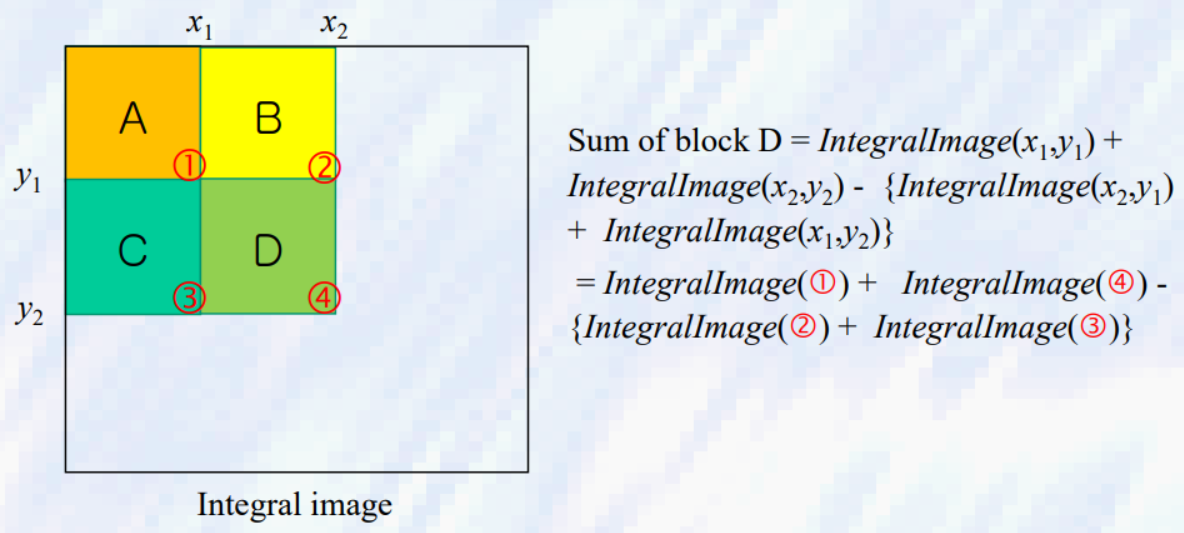
- 통합 이미지 사용의 이점: 통합 이미지의 4개 값만 사용되고 마스크 크기와 상관이 없기 때문에 특정 블록의 합계 작업이 매우 빠름
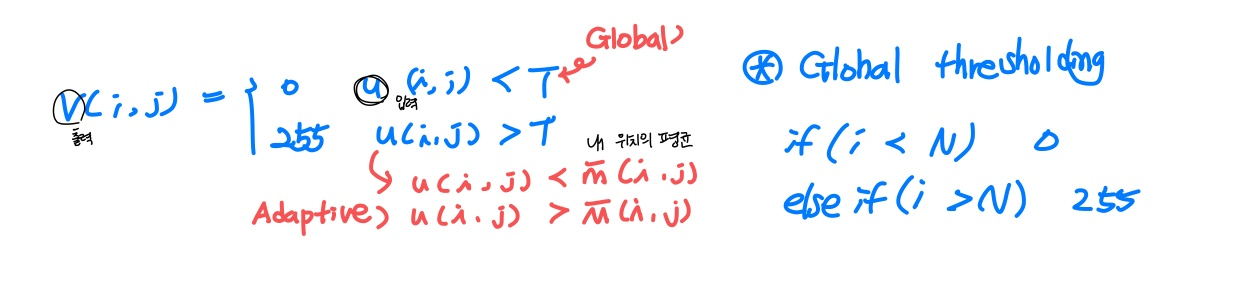
Integral image는 Adaptive(적응적인) thresholding에서 유용함
cf3) Gaussian blurring (표준 정규분포 곡선)
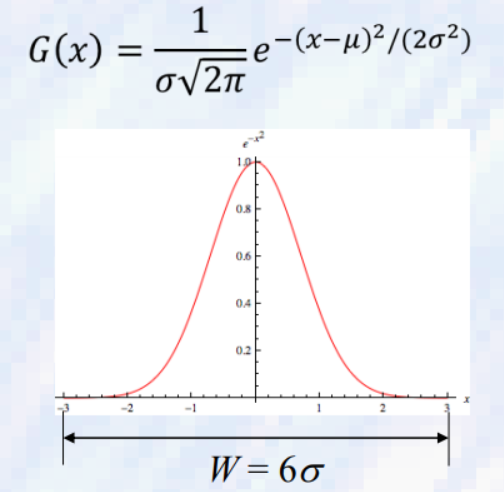
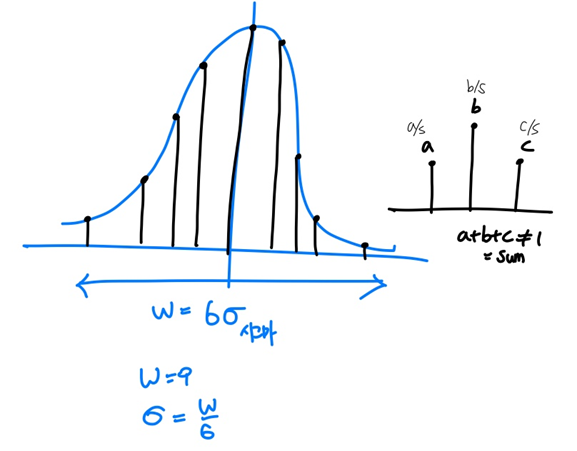
- 주어진 창 크기 W에 따른 방정식의 1차원 이산 창 생성, σ = W/6.
- 무게 표준화(모든 무게의 합계


는 LPF에서 1이어야 합니다.) - 분리 가능한 필터
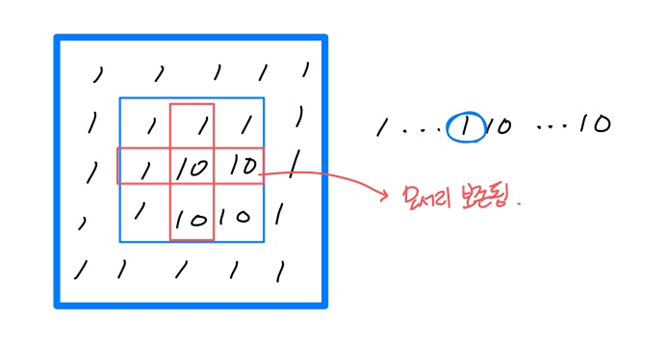
Median Filtering
-
각 픽셀은 중앙 픽셀 주위의 창 W에 포함된 픽셀의 중앙값으로 대체됨

-
order statistics 와 같은 비선형 필터로 분류됩니다.
-
일부 order statistics 필터는 지정된 창의 최소값 또는 최대값을 사용합니다.
-
그것은 충동적인 소음 (impulsive nosie)를 줄이고 가장자리를 잘 보존한다.
-
주의: 1D 분리 가능 중위수 필터와 2D 정규 중위수 필터 사이의 결과는 비선형성으로 인해 고유하지 않습니다.
예) {y(m)}={2,3,8,4,2}와 W=[-1,0,1]로 하자. 시퀀스의 외부 값이 0이라고 가정합니다.- v(0) = median {0,2,3} = 2, v(1) = median {2,3,8} = 3
v(2) = median {3,8,4} = 4, v(3) = median {8,4,2} = 4
v(4) = median {4,2,0} = 2
- v(0) = median {0,2,3} = 2, v(1) = median {2,3,8} = 3
-
속도 느림
-
Salt and papper noise에 대해 효과가 좋음
separable한 적용이 결과값이 더 좋음
Hybrid Filtering
- 비선형(순서 통계) 필터와 선형(공간 평균) 필터가 결합됨
